
基于TMS320F28335的雷达测速系统的设计*
2014-09-28 01:13曹永敏姚亚峰陈海腾李谋辉
电子器件 2014年1期
曹永敏,姚亚峰*,陈海腾,李谋辉
(中国地质大学机械与电子信息学院,武汉430074)
基于TMS320F28335的雷达测速系统的设计*
曹永敏1,姚亚峰1*,陈海腾2,李谋辉3
(中国地质大学机械与电子信息学院,武汉430074)
为了改善雷达测速仪触发相机的反应时间,提高测速精度,设计了一种以DSP芯片TMS320F28335为核心的雷达测速系统,通过DSP采集雷达信号,对车辆运动产生的多普勒频率进行复数傅里叶变换并进行频谱分析,利用目标相关算法自动检测超速目标,发送目标超速状态信息和及时的触发信号,触发图片采集设备抓拍到有效的图片。实验结果分析,触发相机反应时间大约90 ms,测速精度小于1 km/h。
雷达测速;多普勒效应;目标相关;复数傅里叶变换;TMS320F28335
雷达测速仪可以计算出目标与雷达的相对速度,现在广泛用于交通超速测试,雷达测速主要利用多普勒效应原理,当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线而去时,反射信号频率将低于发射机率。如此即可借由频率的改变数值,计算出目标车辆的行驶速度[1]。目前,国内的一些厂家生产的雷达测速仪一般采用单片机进行数据信号处理[4],或使用模拟滤波的方式,易受噪声影响,测速精度低而且反应速度慢。如何提高测速精度和缩短反应时间,是雷达测速系统亟待解决的问题。
本文采用数字信号处理方法解决上述问题,设计以TMS320F28335[2-3]为核心的雷达测速控制系统。TMS320F28335在保持了原有的DSP芯片的同时,能够执行复杂的浮点运算,可以节省代码执行的时间和存储空间,具有精度高,成本低,功耗小,外设集成度高,数据及程序存储量大和A/D转换更精确快速等优点。使用TMS320F28335可以节省运算时间,缩小响应时间。主芯片是以TMS320F28335为核心的信号处理模块,负责算法、滤波和实时信号处理,将车辆雷达运动产生的多普勒频率进行I/Q双通道同步信号采集[8],使用CFFT对雷达信号进行频谱分析。
1 工作原理
1.1 硬件设计
雷达测速仪是由射频部分(雷达)、基带处理部分、CCD摄像机以及上位机部分组成,基带处理部分是整个设备的核心部分。
1.1.1 射频部分
多普勒雷达测速原理[4-5]是基于多普勒效应,它向物体传输微波信号,然后接收物体的反射波,反射回来的电波波长会随着碰到物体的移动状态而改变,经计算可得到物体与雷达的相对速度,射频部分实现雷达波的传输和反射波的接收。这一部分采用德国InnoSent公司最新推出的一款IPS (Innosent Product Stereo)系列的多普勒雷达传感器IPS-182。IPS-182由于天线角度较小、测量精确、成本低廉,已在交通监测、工业应用等领域崭露头角。射频部分输出的信号是回波和发射波混频后的信号,该信号经过放大和低通滤波后,形成I、Q双通道模拟正交低频信号(图1),进行双通道连续波多普勒测速。

图1 IPS-182原理图
假设如图1所示的多普勒雷达传感器发射频率为f0,遇到被测车辆,雷达信号被反弹回来,接收器接收反射信号,频率为f/0,当目标车辆与传感器之间的相对速度为v时,根据多普勒原理可以得到:

其中fd是多普勒频率,C为电磁波在空间的传播速度3×105km/s。通过式(1)求得车辆行驶速度v。
1.1.2 基带信号处理
图2是以DSP芯片TMS320LF28335为核心的基带信号处理部分,实线框中就是TMS320F28335的完成的主要功能,实现信号处理和接口功能,该芯片内部包含两路12 bit模数转换模块,同步采集I、Q通道中频放大信号,中央处理单元对信号进行相应的噪声处理,频率变换分析和数据相关算法的处理,获得检测目标的频谱,提取出运动目标的多普勒频率,把该频率通过RS232接口传输给上位机。当运动目标超速时,输出触发信号,触发摄像机抓拍有效图片。基带部分信号处理原理框图[6-7]如图 2所示。

图2 基带信号处理原理框图
1.1.3 CCD摄像机控制器及上位机接口部分
CCD摄像机控制器是由相机厂商提供RS232或者RS485接口与DSP连接,通过IP网络来连接上位机,接收并将RS232接口传输过来的目标信息集成到图片上,最后通过网络上传到服务器。摄像机控制器使用HD Vision系列高清摄像机,拍照延时为150μs~40 ms。
1.2 目标相关算法
基带信号处理过程中,两路AD转换通道对两路雷达信号进行同步的高速采集[8-9],采样频率设为25 000 Hz,每帧数据长度取256点,图3(a)是AD转换通道同时采集的一帧数据,采样时间为256× (1/25 000)=0.010 24 s=10.24 ms,再加上摄像机延时40 ms,网络延时约为40 ms,则总共需要大约90 ms的响应时间。为了得到最佳的频率分辨率,选择N=1 024点的傅立叶变换,图3(b)是经过CFFT后获得的频谱图,频率分辨率最小值为:

图3 通道信号和变换后的频谱

多普勒频率为(n是图3(b)最大频率对应的点):

它对应的时速误差为:

测速精度小于1 km/h,可以达到0.55 km/h。
如何把采样到的256点变为N=1 024的傅立叶变换是我们接下来需要考虑的问题。为了解决这个问题,对DSP芯片的AD模块和DMA模块进行了改良,具体步骤如下:
(1)通过设置定时器定时周期Ts来定时触发AD转换,AD采样频率为1/Ts(25 000 Hz)。将采集1 024优化为采集256点。
(2)DMA模块开辟一个交叉的1 024点的缓存区,分成两个空间,一半是buffer_ping,一半是buffer _pong,如果一个空间在存储数据,那么另一个空间就在在计算,具体如下:
AD模块两路通道进行同时采样,每采集一次数据触发DMA搬运到指定缓冲区,buffer_ping或者buffer_pong,DMA每次搬运两个数据,分别为I通道和Q通道的采样结果。存储时先存储I后存储Q,按照顺序交叉存储,例如buffer_ping[0]是存储第1次对I通道采样的结果,buffer_ping[1]存储第1次对Q采样的结果,buffer_ping[2]是存储第2次对I采样的结果,buffer_ping[3]是存储第2次对Q采样的结果,依次交叉存储采样数据。进行一次DMA搬运后(搬运512个采样数据,I通道的256点和Q通道的256点)产生DMA中断,中断程序中更改缓冲区地址,如果ping缓冲区采集满换成pong缓冲区,ping—pong缓冲区交替使用。因为复数傅里叶变换CFFT的时间远小于采集256个复数的时间,如果AD一直在采集数据,采集满ping缓冲区后,继续采集的数据放在pong缓冲区,将采集满ping缓冲区的数据赋值到CFFT的输入缓冲区进行计算,这样子采集和CFFT计算互不干扰,并行执行,节省了很多时间。图4为搬运过程。
图4所示第一排的数据为1 024点的复数空间,在每次DMA搬移新的256点的复数前,都会将上一次的后256~1 024的数据搬到前0~768的空间中,形成新的数据控件,并将新的256点的复数数据填到新的数据空间的768~1 024所在的地址中。所以右边的768~1 024的控件每次由采集好的ping或者pong缓冲区填充,构成了新的输入缓冲区,这样就可以进行1 024点的复数傅里叶变换。
根据目前的算法,需要采集4次256点的复数,才可以将1 024点的复数傅里叶变换的存储空间填满,没有填满的部分是初始值0。
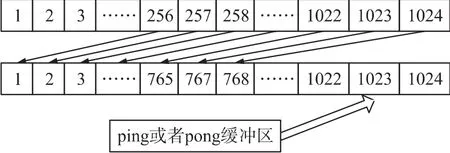
图4 两帧数据的存储方式
2 软件系统设计[10]
软件系统采用了流行的面向对象的设计思想和模块化的设计流程,并且采用了分层设计的原则,充分利用TI公司提供的相应数字信号处理库进行设计。
应用层软件分为5个模块:信号采集模块、滤波模块、CFFT变换模块、目标速度相关计算模块、参数设置及信息输出模块。
信号采集模块完成的工作:对信号进行A/D转换,采样频率值的决定。采集过程当缓冲区数据满时,ADC产生中断信号。CPU响应中断,总线控制权交给DMA开始读取块数据,对接收数据进行去直流分量,分实部、虚部为数据分配存储空间。
滤波模块完成的工作:使用软件滤波将频率范围外的高频、工频干扰消除。做法是首先用MATLAB模拟窗函数系数,使用循环卷积对输入信号进行FIR滤波。
CFFT变换模块完成的工作:对输入信号经CFFT变换求出临时f附近频谱,根据频谱分析理论和在仿真软件MATLAB下建模仿真知道该算法能估计出信号的主频,而且抗干扰能力强,实现简单。此变换是整个系统软件中的核心。
目标速度相关计算模块:分为频谱最大值及下标计算、速度计算、进行目标相关算法判别3个部分实现。
参数设置及信息输出模块:测得的输出目标信息(速度、方向等)经 RS232接口输出,并通过RS232进行设置雷达的相关参数。
主程序流程如图5所示。

图5 DSP主程序流程图
3 测试结果
将雷达测速仪固定在一定位置,测试车辆以20 km/h、30 km/k、40 km/h、……、80 km/h的速度通过雷达探测区域,记录雷达测速仪测试的结果。测速仪测速最大误差也只有0.5 km/h(根据最小可区分多普勒频率计算),达到小于1 km/h的目标要求,实际测试精度结果如图6所示。

图6 速度误差分布
信号持续时间是指车辆开始进入雷达探测区域[11]至车辆完全驶出雷达探测区域的时间,它与雷达探测区域的长度d和车长L有关,信号持续时间t=(d+2L)/v。设雷达发射的工作频率为24.151 5 GHz,雷达探测区域的长度d为2.7m~5.4m,车长L为1.5 m~8 m,计算车速为250 km/h的车辆信号持续时间为0.082 s~0.308 s,300 km/h信号持续时间为0.068 s~0.257 s,而市场上目前的雷达测速仪响应时间在120 ms左右,在信号持续时间内响应及时度不高的,而经过算法改进的测速仪测量实际反应时间只需要90 ms,响应时间大大缩短,响应及时度提高,当车辆速度为250 km/h时,照相机抓拍率接近100%,所以经过改进后的雷达测速仪测速范围10 km/h~250 km/h的要求。
4 结论
本文利用了TMS320F28335实现了雷达测速仪的速度测量,性能稳定、可靠和快捷地计算并显示速度,同时也可以通过串口发送信息到上位机,并触发摄像机拍摄,实现远程监控与数据采集。最后实现的测速准确率达到1km/h,测速范围在10 km/h~250 km/h,满足测速要求,探测时间为90 ms左右,比现在市场上的雷达测速仪的探测时间要快30 ms。同时该系统体积小、质量轻、功耗低、操作方便,能够满足目前国内对高速路段和城市路段速度检测系统的要求,为交管部门的监控提供了重要手段,目前本产品已经完成样品,在实际推销应用中。
[1]刘芳.基于DSP的雷达测速计量系统的研究[D].天津:天津理工大学,2010.
[2]陈金鹰.DSP技术及应用[M].北京:机械工业出版社,2004.
[3]刘陵顺,高艳丽,张树团,等.TMS320F28335DSP原理与开发编程[M].北京:北京航空航天大学出版社,2011.
[4]谢宜生,沈国江,吴柒灿.基于MSP430的车载雷达测速测距系统[J].计算机工程,2011,37(18):236-239.
[5]Sahu O P,Gupta A K.Measurement of Distance and Medium Velocity Using Frequency-Modulated Sound/Ultrasound[J].IEEE Transactions on Instmmentation and Measurement,2008,57(4): 838-842.
[6]贾文超,白显,任利哗,等.基于DSP处理器的多普勒雷达系统设计[J].长春工业大学学报(自然科学版),2007,28(1):70-73.
[7]Cem Unsal,Rahul Sukthankar,Chuck Thupe.Functional Sensor Modeling for Automated Highway Systems Simulations[C]//SPIE International Symposium on Intelligent Systems and Advanced Manufacturing Technical Conference on Intelligent Transportation Systems,1997,59(6):13-20.
[8]刘邹.基于DSP的测速雷达数据采集与处理[D].无锡:江南大学,2008.
[9]赵迎辉.基于DSP的数据采集与处理系统的设计与实现[D].成都:西南交通大学,2006.
[10]田文涛.交通测速雷达系统的设计[D].西安:西安电子科技大学,2009.
[11]于金霞,蔡自兴,邹小兵,等.移动机器人导航中激光雷达测距性能研究[J].传感技术学报,2006,19(2),356-360.
The Design of Radar Speed Measurement System Based On TMS320F28335*
CAO Yongmin1,YAO Yafeng1*,CHEN Haiteng2,LIMouhui3
(Faculty of Mechanical and Electronic Information,China University of Geosciences,Wuhan 430074,China)
In order to improve the response time and the mearuring accuracy of the radar speed measurement,a radar speedmeasurement system is designed based on DSP-F28335.DSP acquires the radar signals,carries out complex fourier transform(CFFT)on Doppler frequency caused by vehiclesmovement,and then analyses the spectrum.In the process of system operation,the system uses target-correlation algorithm to detect over speed vehicle automatically,sends the information of the over speeding and triggers signal to trigger image acquisition equipment to getuseful photo.By analysing of experimental results,the response time is about90ms,speed measuring precision is less than 1 km/h.
speed radar;doppler effect;target-correlation;CFFT;TMS320F28335
10.3969/j.issn.1005-9490.2014.01.017
TN953+.1 文献标识码:A 文章编号:1005-9490(2014)01-0067-05
项目来源:中央高校基本业务费专项基金项目(CUG120408)
2013-04-11修改日期:2013-05-19
EEACC:6320
曹永敏(1989-),女,汉族,河北人,中国地质大学机械与电子信息学院硕士研究生,主要研究方向为DSP及嵌入式系统设计和软件设计等,184217732 @qq.com;
陈海腾(1988-),男,汉族,江苏盐城人,中国地质大学机械与电子信息学院硕士研究生,主要研究方向为基于ARM的嵌入式系统设计、无线通信系统关键技术研究,106316438@qq.com;
姚亚峰(1970-),男,汉族,湖北黄梅人,中国地质大学机械与电子信息学院副教授。主要研究方向为通信系统设计、嵌入式系统设计、现代数字信号处理等,yafeng.yao@gmail.com;


李谋辉(1989-),男,汉族,湖北咸宁人,中国地质大学机械与电子信息学院硕士研究生,主要研究方向为嵌入式系统开发、数字系统设计等,afei2222afei @qq.com。
猜你喜欢
科学技术创新(2021年11期)2021-05-25
商品与质量(2019年51期)2019-11-28
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
沈阳工业大学学报(2018年1期)2018-01-08
中国工程机械学报(2016年5期)2016-03-07
项目管理技术(2015年3期)2015-04-23
时代人物(2014年10期)2015-01-28
