测量误差对水下地形匹配性能的影响研究*
2014-09-20 09:27高永琪
弹箭与制导学报 2014年1期
高永琪,刘 洪,张 毅
(1海军工程大学,武汉 4300332;2 92858部队,浙江宁波 315800)
0 引言
水下地形匹配辅助导航技术[1-5]是解决潜航器水下长期导航问题的有效方法之一。基于PMF算法[6]的水下地形辅助导航系统,其原理如图1所示。通过PMF算法对事先存入潜航器中的预定区域的地形数据和借助测深测潜传感器实时测得的地形数据进行滤波处理,得到潜航器的当前位置,从而对惯导系统(INS)输出进行误差修正,控制航行器按照指定航线航行。由于潜航器在航行过程中,存在深度、速度和航向的测量误差,这些误差将直接影响水下地形匹配性能。为此,文中在两块不同的真实地形上运用PMF算法对这些误差进行了仿真研究,以确定各种不同测量误差对水下地形匹配性能的影响程度,进而为水下地形匹配导航技术的工程应用提供理论依据。

图1 基于PMF算法的水下地形导航系统原理图
1 算法模型
PMF算法将矩形搜索区域离散化为有限个小网格,从而使递推贝叶斯积分简化为在搜索区域上的有限网格黎曼和。将状态变量在每个网格的概率作为网格点的权值,用这些带权值的网格点集来逼近后验概率密度,从而不受非线性、非高斯问题的限制,从理论上解决了由于非线性模型的线性化近似所带来的各种问题,并且达到减少解算时间和复杂度的目的。
给定二维非线性模型:

式中:δxk表示k时刻潜航器实际位置与指示位置的偏量,δxk=(δxk,N,δxk,E),xk=(xk,N,xk,E),xk,N和xk,E分别表示k时刻潜航器位置在正北和正东方向的坐标分量,h(xk)为在xk这点位置的真实深度,vk为随机过程噪声,wk为随机观测噪声。

其中 j=1,…,N,i=1,…,N,将权值进行归一化:

测量更新:

将权值进一步归一化:

然后返回式(3)再进行重新计算,继续迭代,直到达到规定次数时结束循环。
2 测量误差对匹配性能的影响
测深声纳测量潜航器与海底的距离,并将这些数据与压力深度计测得的潜航器深度相加,得到对应位置点的实际深度。所以深度测量误差的来源具有多样性[7]。速度和航向测量误差主要是由惯导系统的陀螺仪和加速度计误差所引起的,他们与安装误差、刻度系数误差和漂移等有关。显然,这些误差的大小与测深声纳和惯导系统设备有关。在选择硬件设备时,测量精度和价格是要考虑的两个重要因素。一般地,设备的价格随精度的提高而增加,但由于数字地图本身就存在一定误差,所以一味追求高精度的设备并不是提高匹配性能的最佳途径。通过应用PMF算法对在不同深度、速度和航向测量误差进行仿真研究,得出误差大小与匹配性能之间的关系,可以为测深声呐和惯性系统设备的选择提供一定的理论依据。
仿真研究使用了两块真实的地形图,分别如图2和图3所示。图2所示地形的标准差σT=915.195 4 m,由地形粗糙度分类可以得知该地形属于非常粗糙类型。图3所示地形的标准差σT=15.028 3 m,该地形属于平坦地形。两块地图的分辨率都为20 m。

图2 大起伏地形
图3 平坦地形
2.1 深度测量误差的影响
为了研究确定深度测量误差大小对匹配性能的影响,将其它参数进行固定:潜航器速度定为5 m/s,航向为沿X轴正方向,航行时间1 200 s,算法搜索区域的大小为410 m×410 m,分辨率为10 m,初始误差在X轴和Y轴方向各为200m和180m。将其深度测量误差分别设为1 m、2 m、3 m、4 m、10 m 和40 m,在两块不同地形上进行多次仿真,来确定深度测量误差与匹配性能的关系。表1为经PMF算法仿真后的结果。
表1 深度测量误差导致的匹配误差
从表1可知,无论是大起伏地形还是平坦地形,在深度测量误差逐渐增大时,PMF算法的匹配误差均值随之相应增加,误差方差也增加。在深度测量误差从1 m增加到4 m过程中,在大起伏地形中其误差均值和最大值变化很小,而在平坦地形中,其误差均值、最大误差、误差方差和终点误差迅速增大,并且在深度测量误差为3 m时,算法就开始发散,但在大起伏地形中,深度测量误差为40 m时才开始发散。充分说明了算法在平坦地形中对深度测量误差更敏感,相反在大起伏地形时其抗深度测量误差能力更强。图4和图5分别给出了深度测量误差为4 m时在大起伏地形和平坦地形中的匹配误差。

图4 在大起伏地形的匹配误差

图5 在平坦地形的匹配误差
2.2 速度测量误差的影响
为了研究确定速度误差大小与匹配性能的关系将其它参数按与上节相同的方法进行固定,速度测量误差分别设为 0.05 m/s、0.1 m/s、0.2 m/s、0.4 m/s和0.6 m/s,然后在两块地形上进行多次仿真。表2为在不同速度误差下,经PMF算法仿真后的结果。图6和图7分别给出了在大起伏地形中速度误差为0.2 m/s和0.4 m/s时的匹配误差。

表2 速度误差导致的匹配误差
由表2、图6和图7可以看出,随着速度误差的增加,最终匹配结果包括最大误差、终点误差、误差均值也随之增加。但当速度误差增加到0.4 m/s时,无论在大起伏地形还是在平坦地形中,匹配结果都会发散,这主要是因为速度误差增加到一定程度时,随着航行时间的增加,惯导系统指示的位置与潜航器真实位置的偏差增大,从而导致搜索区域不能涵盖真实位置(例如图7所示的情况)。在收敛的情况下,随着速度误差的增加,算法对平坦地形的匹配效果更差。

图6 速度误差为0.2 m/s时的匹配结果

图7 速度误差为0.4 m/s时的匹配结果
2.3 航向测量误差的影响
为了研究确定航向误差大小与匹配性能的关系,将模型其它参数按与上节相同的方法进行固定,航向测量误差分别设为 0.1°、1°、2°、4°和 6°,然后在两块不同地形上进行多次仿真。表3为不同航向误差下,经PMF算法仿真后的结果,图8和图9分别给出了在大起伏地形中航向误差为1°和6°时的匹配误差。

表3 航向误差导致的匹配误差
根据表3、图8和图9可知,随着航向误差的增加,最终匹配结果包括最大误差、终点误差、误差均值基本也随之增加。而当航向误差达到一定值时,算法在两块不同地形中都开始发散,这主要是因为航向误差增加到一定程度时,随着航行时间的增加,惯导系统指示航迹与潜航器真实航迹的间距越来越大,最终到某个时刻时搜索区域不能涵盖真实位置(例如图9所示的情况)。
图8 航向误差为1°时的匹配误差
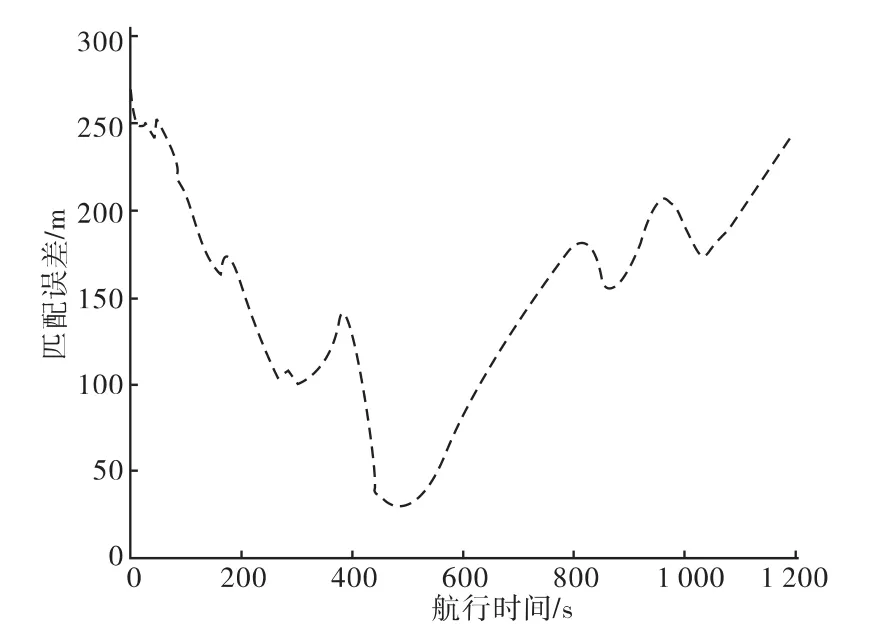
图9 航向误差为6°时的匹配误差
3 结论
水下地形匹配辅助导航性能是受包括潜航器测量误差在内的多种因素影响的,文中主要通过运用PMF算法在两种不同真实地形图上进行的仿真研究,得出了潜航器的深度、速度以及航向测量误差与匹配性能间的关系。可以知道:在平坦地形中深度误差对算法匹配性能的影响最大,但在大起伏地形中可以允许较大的测深误差。而当速度和航向测量误差达到一定值时,匹配结果不再收敛。在收敛的情况下,速度和航向测量误差在平坦地形对匹配性能的影响比在大起伏地形中的要大。
[1]辛廷慧.水下地形辅助导航方法研究[D].西安:西北工业大学,2004.
[2]刘承香.水下潜器的地形匹配辅助定位技术研究[D].哈尔滨:哈尔滨工程大学,2003.
[3]刘准,侣文芳,陈哲.海底地形匹配技术研究[J].系统仿真学报,2004,16(4):700 -702.
[4]李临.海底地形匹配辅助导航技术现状及发展[J].舰船电子工程,2008,28(2):17 -19.
[5]冯庆堂.地形匹配新方法及其环境适应性研究[D].长沙:国防科学技术大学,2004.
[6]K Anonsen,O Hallingstad.Terrain aided underwater navigation using point mass and particle filters[C]//IEEE/ION.Position,Location,and Navigation Symposium,2006.
[7]杨久东,马飞虎,孙翠羽,等.声纳测深数据滤波及实践[J].测绘信息与工程,2010,35(1):49 -50.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
新世纪智能(高一语文)(2021年3期)2021-07-16
数字海洋与水下攻防(2020年5期)2021-01-04
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2018年1期)2018-04-20
电子制作(2017年24期)2017-02-02
探测与控制学报(2015年4期)2015-12-15