
摇臂式电镀取料机械手的结构设计
2014-09-18 06:30:38陈刚
电镀与环保 2014年6期
陈 刚
(湖南汽车工程职业学院,湖南 株洲 412000)
摇臂式电镀取料机械手的结构设计
陈 刚
(湖南汽车工程职业学院,湖南 株洲 412000)
根据环形电镀线的特点,介绍了摇臂式电镀取料机械手的基本运动和基本结构,并详细说明了其直线运动、旋转运动和抓手的设计,为摇臂式电镀取料机械手的设计提供借鉴。
电镀;机械手;结构设计
1 摇臂式电镀取料机械手的应用
随着科技的发展,电镀生产线的自动化程度越来越高,机械手也逐步应用于电镀生产中。摇臂式电镀取料机械手就是其中的一种,其在电镀件的夹持和挪位方面具有很大的方便性。如图1所示的环形电镀生产线,在其过渡区就可以采用摇臂式电镀取料机械手。
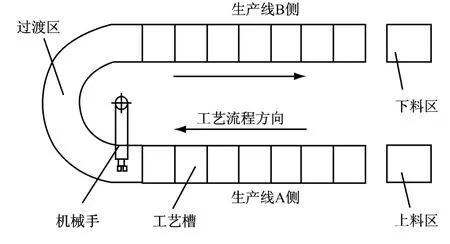
图1 环形电镀生产线示意图
2 摇臂式电镀取料机械手的运动与结构
典型的摇臂式电镀取料机械手的运动形式,包括水平直线运动、垂直直线运动和旋转运动。
摇臂式电镀取料机械手的典型结构形式,如图2所示。
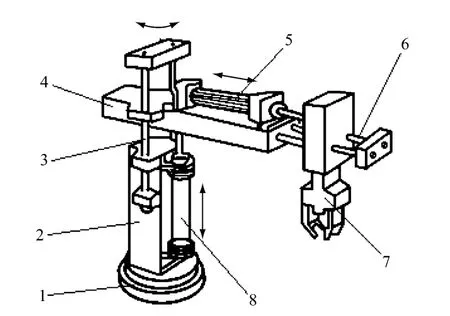
图2 摇臂式电镀取料机械手的典型结构形式
3 摇臂式电镀取料机械手的结构设计
3.1 直线运动的设计
大部分机械手采用气动结构来实现往复直线运动。最著名的气动元件供应商有FESTO(德国)、SMC(日本)、KOGANEI(日本)等。与其他自动机械一样,在设计时都是直接选用上述公司的标准气动元件。在机械手的设计过程中,为满足机械手高速运动的要求,需要尽可能地减轻负载,所采用的气缸必须具有尽可能小的质量。一般都选择质量较轻的气缸,在夹钳部位一般选用体积较小、安装灵活方便的多面安装气缸来驱动。
(1)垂直直线运动
如图2所示,垂直移动气缸固定在旋转底座上,通过压缩空气驱动气缸的活塞进行垂直伸缩,进而推动水平支座的上下移动。其中导杆起到导向作用,以保证运动的精度。
(2)水平直线运动
如图2所示,水平移动气缸固定在水平支座上,通过压缩空气驱动气缸的活塞进行水平伸缩,进而推动抓手的水平移动。其中导杆起到导向作用,以保证运动的精度。
3.2 旋转运动的设计
如图1所示,当电镀件由生产线A侧转移至B侧时,机械手需要旋转180°。对于这种旋转角度较大的场合,采用步进电机或者伺服电机进行驱动,旋转的角度通过驱动器实现。
3.3 抓手的设计
根据电镀产品的结构形式,可以采用夹钳式抓手和钩托式抓手来实现抓取放松电镀件。
(1)夹钳式抓手
夹钳式抓手是工业机器人最常用的一种手部形式。夹钳式手部结构,如图3所示。手部松开和夹紧工件就是通过手指的张开和闭合来实现的。通过驱动原件和传动机构实现夹紧和松开动作。
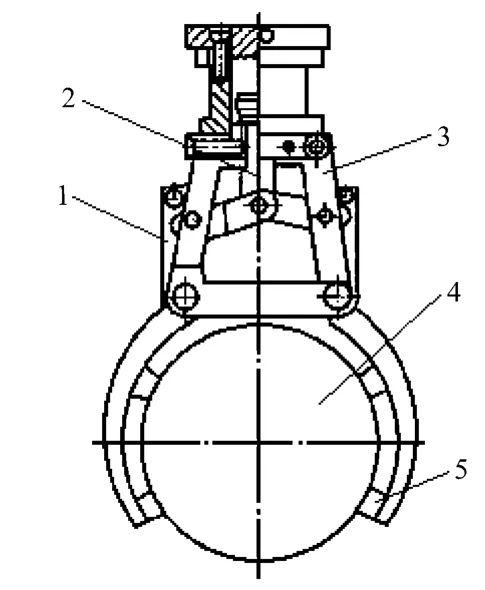
图3 夹钳式手部结构
(2)钩托式抓手
在电镀过程中,有部分电镀件采用吊篮进行电镀。这时采用钩托式抓手就是一种很好的抓取方法。它的主要特征是不靠夹紧力来夹持工件,而是利用手指来托持工件。应用钩托方式可降低驱动力的要求,简化手部结构,甚至可以省略手部驱动装置。它适用于在水平面内和垂直面内做低速移动的搬运工作,尤其对大型笨重的工件或结构粗大而质量较轻且易变形的工件更为有利。
钩托式手部可分为无驱动装置型和有驱动装置型,如图4所示。
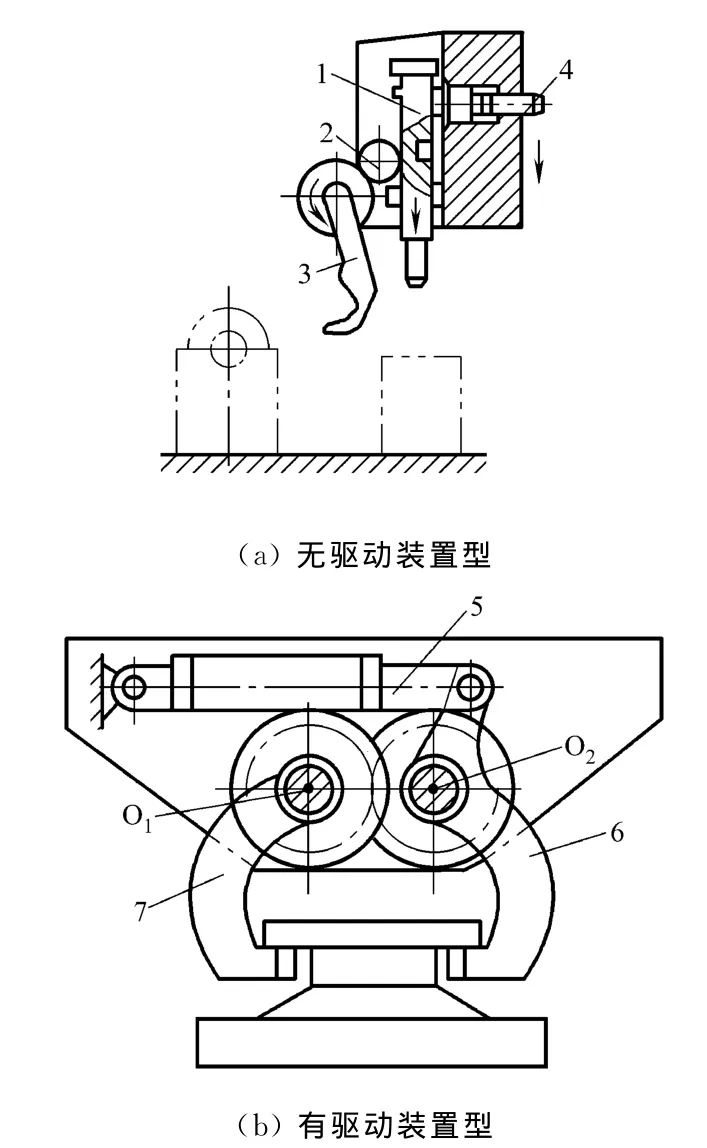
图4 钩托式手部结构
图4(a)所示的是一种无驱动装置的钩托式手部。手部在臂的带动下向下移动,当手部下降到一定位置时齿条下端碰到撞块,臂部继续下移,齿条便带动齿轮旋转,手指即进入工件钩托部位。手指托持工件时,销子在弹簧力作用下插入齿条缺口,保持手指的钩托状态并可使手臂携带工件离开原始位置。完成钩托任务后,电磁铁将销子向外拔出,手指呈自由状态。
图4(b)所示的是一种有驱动装置的钩托式手部。其工作原理是:依靠机构内力平衡工件重力以保持托持状态。驱动气缸以较小的力驱动杠杆手指回转,使手指闭合至托持工件的位置。手指与工件的接触点均在其回转支点O1,O2的外侧,因此,在手指托持工件后,工件本身的质量不会使手指自行松脱。
4 小结
机械手因具有空间转移及控制性能好等优点,在电镀线上逐渐得到应用。本文从应用、运动与结构等方面阐述了摇臂式电镀取料机械手的设计,对具体设备设计有很好的指导作用。
Structure Design of Swing Arm Type Electroplating Manipulator
CHEN Gang
(Hunan Automotive Engineering College,Zhuzhou 412000,China)
The basic motion and basic structure of swing arm type electroplating manipulator are introduced according to the features of circular electroplating line,and the designs for its linear motion,rotary motion and tongs are also detailed,providing a reference for the design of swing arm type electroplating manipulators.
electroplating;manipulator;design of structure
TQ 150.5
A
1000-4742(2014)06-0043-02
2013-02-17
猜你喜欢
锻造与冲压(2024年5期)2024-03-27 08:01:08
金属加工(冷加工)(2023年1期)2023-02-04 03:34:44
实用手外科杂志(2022年2期)2022-08-31 09:48:02
锻压装备与制造技术(2022年1期)2022-03-24 13:22:58
再生资源与循环经济(2021年7期)2021-04-09 13:22:52
水泥工程(2020年4期)2020-12-18 07:12:12
装备制造技术(2020年2期)2020-12-14 03:09:36
制造技术与机床(2018年11期)2018-11-23 01:08:04
河南工学院学报(2017年1期)2017-06-07 09:00:59
实用手外科杂志(2015年4期)2015-08-27 01:54:14
