
大型雷达天线六自由度自动对接平台设计*
2014-09-16 03:14周红,樊雷,黄珲
电子机械工程 2014年5期
周 红,樊 雷,黄 珲
(成都中电锦江信息产业有限公司, 四川 成都 610051)
大型雷达天线六自由度自动对接平台设计*
周 红,樊 雷,黄 珲
(成都中电锦江信息产业有限公司, 四川 成都 610051)
米波雷达具有天线口径大、质量重、需分离运输的特点,目前天线的拼装大多采用人工或吊车辅助的方式,耗时长且存在不安全因素。为解决米波雷达天线的快速拼装难题,本文介绍了一种用于大型机动型雷达天线的六自由度自动对接平台,对其工作原理、组合机构、液压系统、控制系统等的设计进行了详细的论述。该平台已用于某型雷达天线,实现了天线的自动对接拼装,提高了雷达的机动性。该平台技术可为其他大型机动雷达提供设计参考。
大型雷达天线;六自由度;自动对接平台
引 言
早在1947年,英国的Gough采用并联机构设计了一种六自由度的轮胎测试机,1965年,Steward设计了一种含有3个支链的六自由度运动平台[1],并提出将其应用于飞行模拟器,向世界第一次展示了六自由度平台技术。随着多年来该平台技术的发展,该装置较多应用于航天飞行器对接、战机空中加油、工业机械臂、振动试验室及飞行模拟器等设备上。
六自由度平台在国内已发展多年,一直是国内科研院校传动及控制技术领域的热门技术。国内多所科研院校都已研制出了较为完善的六自由度平台,燕山大学的黄真、清华大学的汪劲松、北京交通大学的方跃法等先后用不同的方法对六自由度和少自由度并联机构进行了研究,并取得了重要的成果[1]。国内航空航天研制单位基于这些理论成果衍生出多种对接装置,应用在多个领域。
米波雷达由于其作用距离远,具有反隐身、抗反辐射导弹的能力,近年来得到了广泛的应用。俄罗斯率先开展新型米波雷达的研究,在我国也是近年来国土防空武器领域的研究重点。米波雷达天线通常口径大,质量重,运输时需要分块或分部分由多辆车进行运输,到达阵地后大多需要使用吊车或随车吊进行拼装,如俄罗斯的天空、首领等大型米波雷达都是采用人工拼装或吊车辅助拼装天线,操作复杂且存在不安全因素。雷达机动性能较差,战情紧急时无法实现机动布防和撤离,影响了雷达作战效能的发挥甚至威胁到雷达的生存。
我国幅员辽阔,地形复杂,战略防御区域分布广,为提高雷达探测效能和生存能力,雷达机动性非常重要,可通过装载与运输设计大力提高地面雷达的机动性[2]。由于米波雷达的固有特点,相比微波雷达,机动性更难实现。国内各雷达承制厂所均将米波雷达的天线快速架撤技术作为关键技术进行攻关,发展米波雷达天线的快速拼接技术成为当务之急。将六自由度平台技术运用到雷达天线的拼装上,具有重大意义,但研究还处于初始阶段。
文中米波雷达天线阵面宽15 m、高19 m,阵面上集成了发射、波控、接收等设备,重量达27 t。阵面采用分块式设计,分为中块和两个边块,分块可折叠,由半挂车运输。该雷达要求架设/撤收时间为1 h/16人,如何快速安全地完成阵面天线的拼装,是急待解决的难题。文中设计了一种六自由度的天线对接平台,安装在边块天线运输车上,能够实现边块天线与中块天线的自动对接拼装,详细叙述了该平台的设计及工作原理。
1 对接平台组成及工作原理
1.1 设计指标及参数
1)在Y方向(车长方向)平移500 mm,绕Y轴旋转±10°;
2)在X方向(车宽方向)平移800 mm,绕X轴旋转±3°;
3)在Z方向(车高方向)移动950 mm,绕Z轴旋转±5°;
4)举升重量≤5 t。
1.2 组成及工作原理
面阵边块天线折叠成3层装在半挂运输车上(图1),边块天线由对接平台承载,平台整体用螺栓固定在边块车的大梁上。为实现边块天线与中块天线的对接,边块天线的装载平台需要实现六自由度的运动。该对接平台由组合机构、液压系统、控制系统、位置测量及校准装置组成。
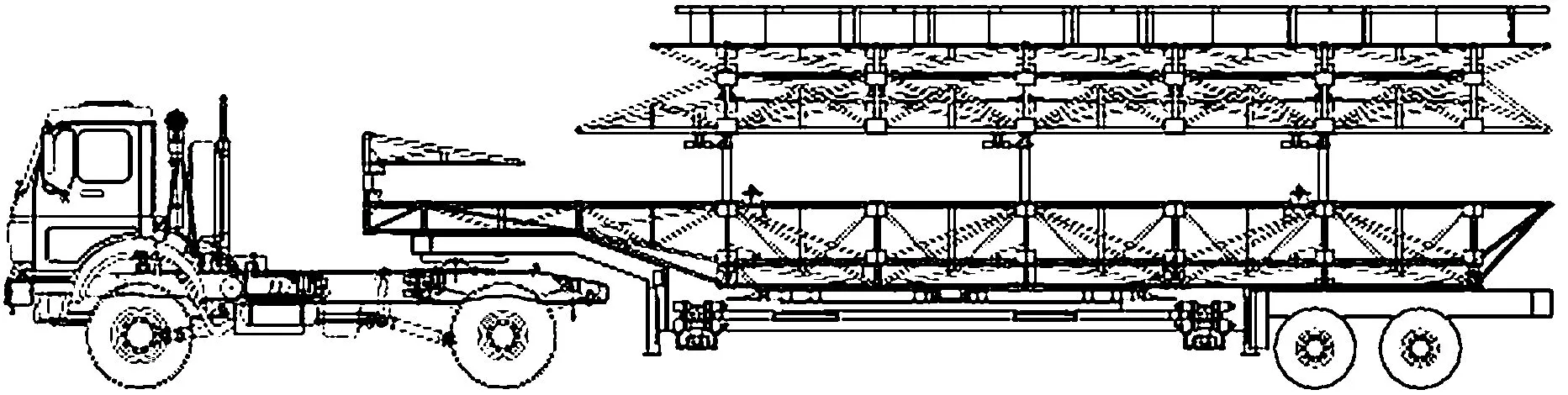
图1 边块车示意图
雷达运输到达阵地后,由控制系统控制液压执行系统使中块车调平,中块天线展开,然后再控制组合机构的六自由度运动,从而带动固定于组合机构上的天线做六自由度运动,在位置测量及校准装置的引导下,使边块天线与中块天线实现自动对接。
2 平台组合机构设计[3]
组合机构设计为底座加4层平台,底座与边块天线挂车大梁相连。底座上设计有4只油缸,可实现边块车调平、组合机构绕X、Y轴的转动和沿Z轴方向的移动。底座与第一平台间设有平行四边形机构及液压举升油缸,可实现车高和车宽方向的位移。第一平台设有沿车长方向的滚动直线导轨副和油缸,可实现车长方向的位移。第二平台设有沿车宽方向的滚动直线导轨副和油缸,可实现车宽方向的位移。第三平台设有滚动轴承和与车宽方向成一定夹角的油缸,可实现绕Z轴的转动。边块天线固定在第四平台上。由于公路运输高度的限制,对接平台的高度尺寸需严格控制。平台组合机构见图2,平行四边形举升机构见图3。
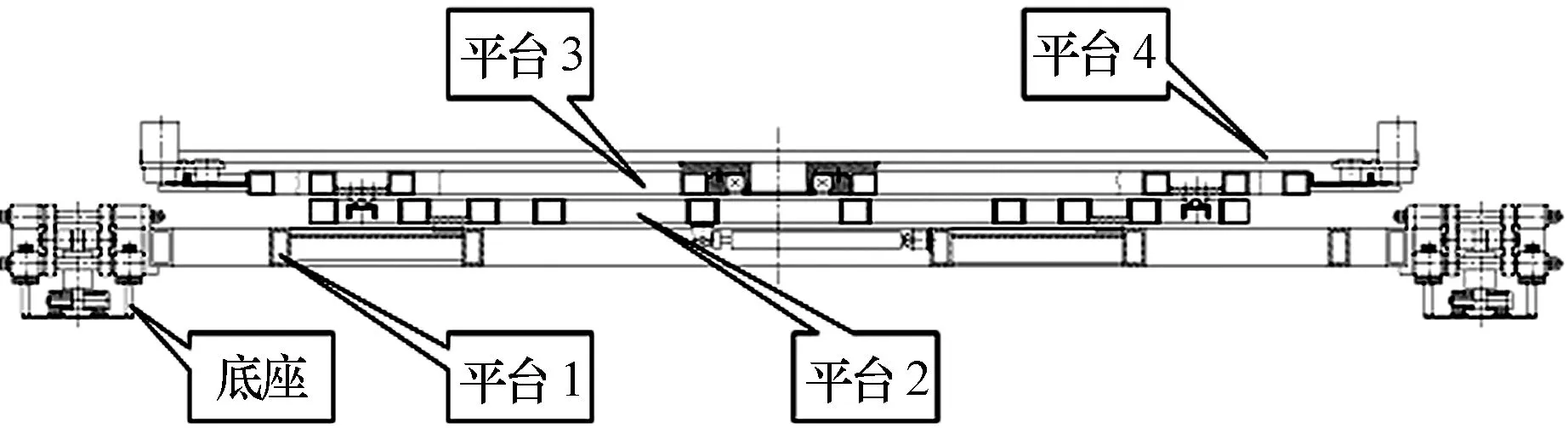
图2 平台组合机构示意图
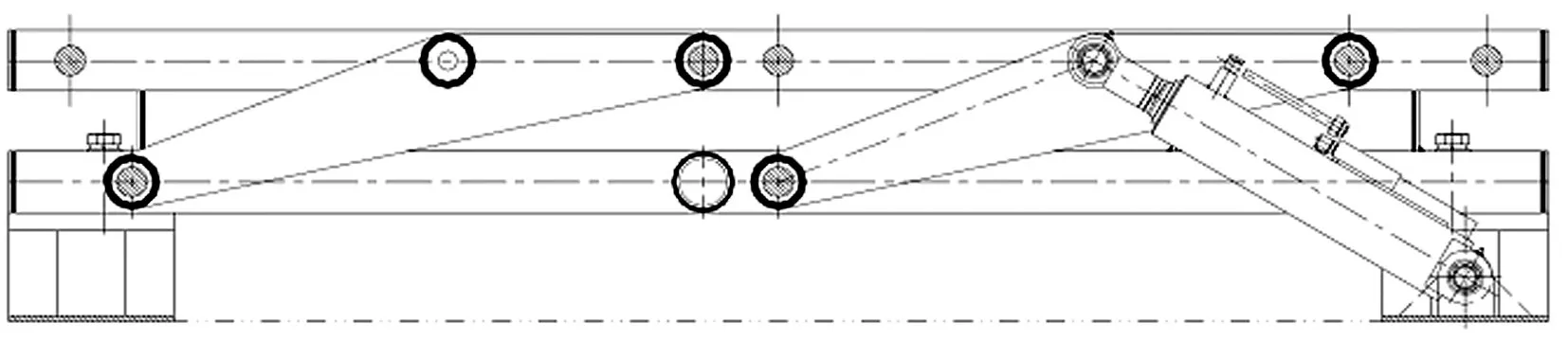
图3 平行四边形举升机构示意图
3 液压系统设计
3.1 系统组成
液压系统安装在边块车车尾,该系统与装载中块天线的主车调平翻转系统共用一个液压源,系统由调平回路、举升回路、平推回路、方位旋转回路及单双向平衡阀、同步阀、单双向调速阀、三位四通换向阀等组成。
3.2 系统原理
该系统与主车共用液压源,采用双联齿轮泵,流量为25 ml/r和4 ml/r,电机功率5.5 kW。其液压原理如图4所示。
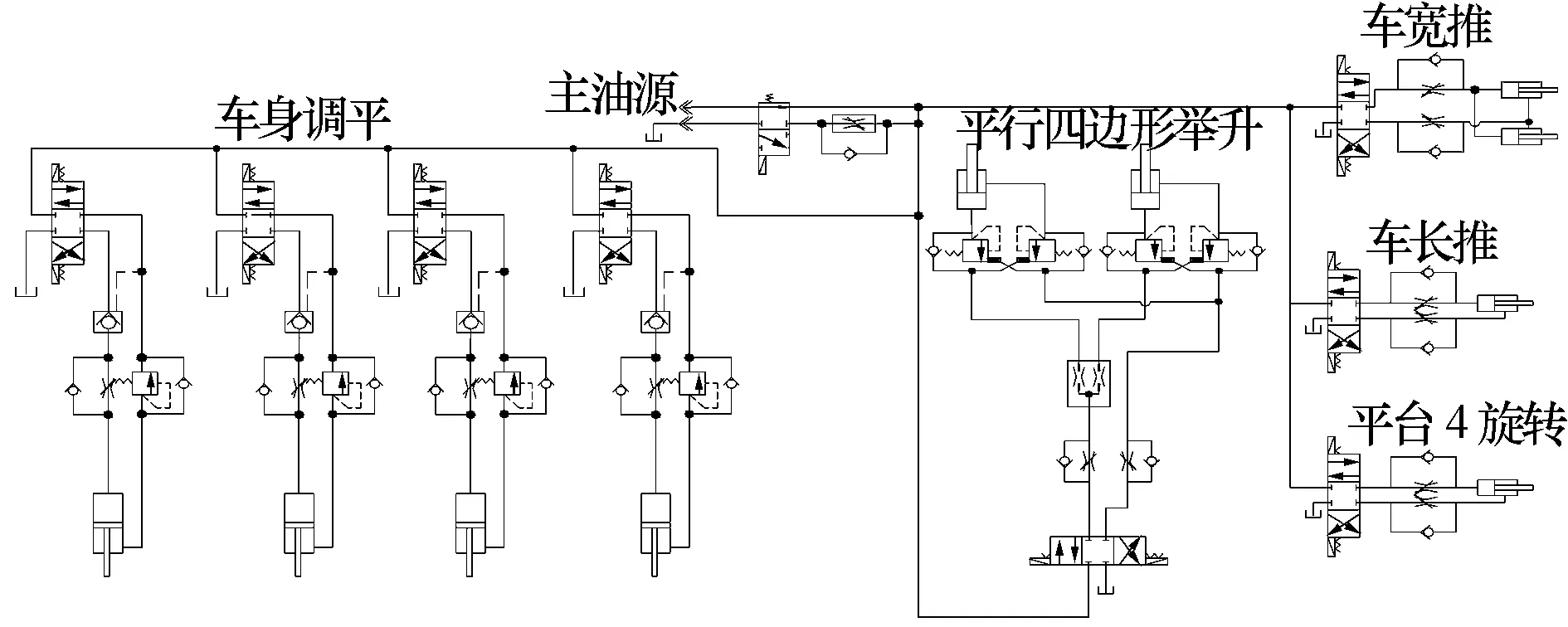
图4 对接平台液压原理图
调平回路由4组完全相同的回路组成,每个回路均由1个三位四通换向阀、液控单向阀、单向调速阀、背压阀组成。换向阀用于动作控制,实现上下运动和停止运动;单向调速阀调节油缸运动速度,保证调平腿在收回时运动平稳;背压阀用于平衡正向负载并调节4个支撑腿的载荷。
举升回路由2只举升油缸、2个单双向平衡阀、1个同步阀、1个单双向调速阀、1个三位四通换向阀组成,完成平行四边形机构的举升,单双向调速阀可实现举升动作的双向调速。
平推回路包含车宽方向平推回路和车长方向平推回路。车宽向平推回路由2只平推油缸、节流阀、三位四通换向阀组成,完成平台沿车宽方向的平移;车长向平推回路组成相同,完成平台沿车长方向的平移。
方位旋转回路由1只油缸、节流阀、三位四通换向阀组成,实现平台绕Z轴的小角度旋转运动。高/低速切换回路由二位换向阀和节流阀组成,实现天线的高/低速切换。
3.3 系统参数
该系统与主车共用液压源,压力为12 MPa。经设计计算,调平油缸缸径80,杆径55。举升油缸缸径90,杆径63。平推油缸缸径50,杆径28。回转油缸缸径50,杆径25。
4 控制系统设计[4]
4.1 组成及功能
控制系统由检测子站、主控分机和远端控制盒(总站)组成。主控分机安装在挂车底盘上,检测子站安装在天线上,远端控制盒用电缆与主控分机连接。控制系统组成示意图见图5。
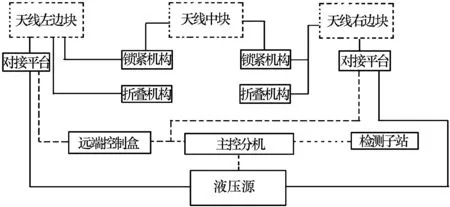
图5 控制系统组成示意图
检测子站分为2种,一种称为检测模块,分布于各天线面阵上、主控分机中,主要就近完成所在位置接近开关、压力继电器的状态检测;另一种称为控制模块,分布于主控分机中,主要就近完成电磁换向阀的控制。
远端控制盒通过RS-485串行接口与分布于天线面阵上各个部位的检测模块、控制模块相连,完成所有检测结果的收集和动作控制命令的发出。
系统通过接收接近开关、压力继电器的信号,控制液压系统的电磁阀,使边块天线在X、Y、Z方向上进行六自由度运动,实现边块与中块天线的对接以及对接后的锁紧。系统还可控制天线的折叠、翻转、调平等动作,完成快速、安全架设/撤收天线的功能。
4.2 控制方式
系统采用分布式检测、集中控制的设计方式。系统由分布于各处的多个检测子站和1个总站,以及连接子站和总站的通讯电缆组成。每个子站自身都能独立工作,也能接收总站的控制命令。
各子站不断对输入的检测信号进行检测。总站则根据各子站上报的检测结果,对相应子站发出控制命令,各子站与总站之间的通讯采用RS-485标准的半双工通讯方式,通讯波特率选择为9 600 bps。为了提高通讯的可靠性,总站与子站之间的所有通讯命令数据都需经过校验,子站对总站的任何命令均有回应。
远端控制盒是系统的控制中心,操作者可以通过总站(远端控制盒)随时了解整个天线面阵各个被检测点的状态,并可以采用人机交互式单步或自动程控方式完成整个天线折叠、对接、锁紧等动作。
4.3 控制单元
4.3.1 检测模块
检测模块放置在天线上,以单片机为检测核心,其输入检测信号与通讯接口均通过光电隔离后再与单片机连接。为了最大程度减化设计,提高检测模块的可靠性,被检测信号经过光电隔离后,直接送入单片机的I/O口。每个检测模块设计为8路检测通道。
检测模块结构外形上设计为全封闭盒形式,所有输入输出接口均通过插座与外部连接。
4.3.2 控制模块
控制模块接收远端控制盒的控制命令,就近完成所控电磁换向阀的控制动作。
控制模块以单片机为控制核心,输入检测信号与通讯接口均通过光电隔离后再与单片机连接。由于电磁换向阀的控制保持电流较大,控制模块输出通过一个小型继电器进行过渡。
控制模块结构外形上也设计为全封闭盒形式,所有输入输出接口均通过插座与外部连接。
4.3.3 远端控制盒
远端控制盒主要由单片机、操作键盘、状态显示屏、RS-485串口电路等部分组成。
远端控制盒的状态显示屏采用液晶显示屏,以文字和图形的方式显示天线面阵上所有被检测点的当前状态。并可显示当前控制动作所进行的步骤,以及控制操作提示。
远端控制盒的操作键盘上提供“自动/手动”、“折叠/展开”、“停止”、“复位”、“启动”等功能按键。操作者结合状态显示屏的内容,可以利用远端控制盒完成对天线折叠、对接、锁紧等所有动作的控制。
5 结束语
本文介绍了一种六自由度自动对接平台,它采用对接方式完成大型雷达天线中块与边块的自动对接拼装,与传统人工拼装、吊装方式相比,具有安全、快捷、方便的特点,已用于某型雷达天线,提高了雷达的机动性,使用效果良好。
该平台技术可推广到其他大型雷达天线,也可为其他大型机动雷达的架设/撤收提供设计参考。
由于是初次将六自由度技术用于雷达天线的拼装,在天线姿态检测和距离测量上采用的是水平传感器和接近开关,控制精度和智能化有待提高。我们将在已有技术的基础上,设计出控制更精准、智能化程度更高的天线对接平台,满足现代战争对雷达机动性、智能化的要求。
[1] 朱大昌. 基于并联支撑机构的车载雷达天线自动调平系统研究[D]. 北京: 北京交通大学, 2008.
[2] 张润逵, 成仁心, 张树雄. 雷达结构与工艺[M]. 北京: 电子工业出版社, 2007.
[3] SCLATER N, CHIRONIS N P. 机械设计实用机构与装置图册[M]. 邹平, 译. 北京: 机械工业出版社, 2007.
[4] 张利平. 液压控制系统及设计[M]. 北京: 化学工业出版社, 2006.
周 红(1964-),女,高级工程师,主要从事雷达总体结构设计工作。
樊 雷(1979-),男,高级工程师,主要从事雷达总体结构设计工作。
黄 珲(1968-),男,高级工程师,主要从事雷达伺服系统设计工作。
Design of Automatic Docking Platform with Six Degrees of Freedom for Large Radar Antenna
ZHOU Hong,FAN Lei,HUANG Hui
(JinjiangInformationIndustryCo.,Ltd.ofCEC,Chengdu610051,China)
Meter-wave radar has large antenna and big mass, and needs disassembly for transport. Manual operations or crane aid are usual ways to assemble the antenna, but these ways take much time and have less safety. To realize the fast assembly of this antenna, this paper introduces an automatic docking platform with six degrees of freedom for large mobile radar antenna, and discusses its working principle, combined mechanism, hydraulic system, control system, and so on in detail. The platform has been used in certain radar antenna. It realizes the automatic antenna docking, increasing the radar mobility. The techniques of this platform can provide design reference for other large mobile radars.
large radar antenna; six degrees of freedom; automatic docking platform
2014-06-25
TN820.8
A
1008-5300(2014)05-0025-04
猜你喜欢
冶金设备(2020年2期)2020-12-28
纤维复合材料(2018年2期)2018-12-07
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
电子制作(2016年19期)2016-08-24
学习月刊(2016年19期)2016-07-11
工业炉(2016年6期)2016-04-10
液压与气动(2015年6期)2015-04-16
汽车零部件(2014年5期)2014-11-11
筑路机械与施工机械化(2014年3期)2014-03-01
