考虑尾流影响的无人机编队视景仿真方法研究
2014-09-15 03:44薛源徐浩军张建林叶蔚
飞行力学 2014年3期
薛源, 徐浩军, 张建林, 叶蔚
(1.空军工程大学 航空航天工程学院, 陕西 西安 710038;2.中国人民解放军94270部队, 山东 济南 250114)
0 引言
徐浩军(1965-),男,浙江余姚人,教授,博士生导师,研究方向为飞行安全与作战效能评估。
在无人机系统越来越强调体系协同能力的背景下,无人机编队飞行仿真技术成为一个重要的研究方向,拥有广阔的发展前景[1-2]。通过无人机编队飞行仿真研究可以拓宽无人机的应用范围、提高执行任务效能、增加系统冗余度,使其较好地适应复杂环境,完成单机无法自主完成的任务。
前机尾流是研究无人机编队问题需要考虑的一个重要影响因素。国外学者较早认识到编队情形下尾流场对后机气动性能及安全性的影响,并进行了相关研究[3-6]。国内研究人员对这一问题的认识还不够,定量研究不足,对无人机编队情形下长机尾流场对僚机气动影响的研究较少。研究工作大多是分析尾流对后机的气动影响,并没有涉及编队飞行控制算法。针对编队飞行控制算法的研究大多是基于理想无尾流扰动状况[7-10],很少涉及前机尾流对后机的气动影响或者研究不深,更少有研究编队视景仿真技术的工作;因此有必要将前机尾流引入到飞行仿真与跟踪控制的迭代过程中,并开展视景仿真技术研究。
本文基于分布式仿真框架[11]构建视景仿真系统,通过提供通用的、相对独立的支撑软件将仿真应用与底层通讯功能分离,使各部分运用各自的技术,最大限度地提高系统的通用性以及各分系统的互操作性和重用性。本文无人机编队视景及态势采用基于OPENGL的图形建模技术进行开发,并采用卫星图片与航空照片、贴图与三维场景模型相结合的地景构建方式,视景仿真中的大地景精度较高,真实感较强。
1 尾流影响下的无人机编队飞行建模
1.1 长机尾流模型
目前,已有多种尾流场中的滚转效应模型,这些模型对尾流场中后机的飞行动力学仿真是可以借鉴的。本文采用Proctor提出的非奇尾涡模型[12],有侧风情况下长机在后方两个展长处的尾流速度场模型如图1所示。
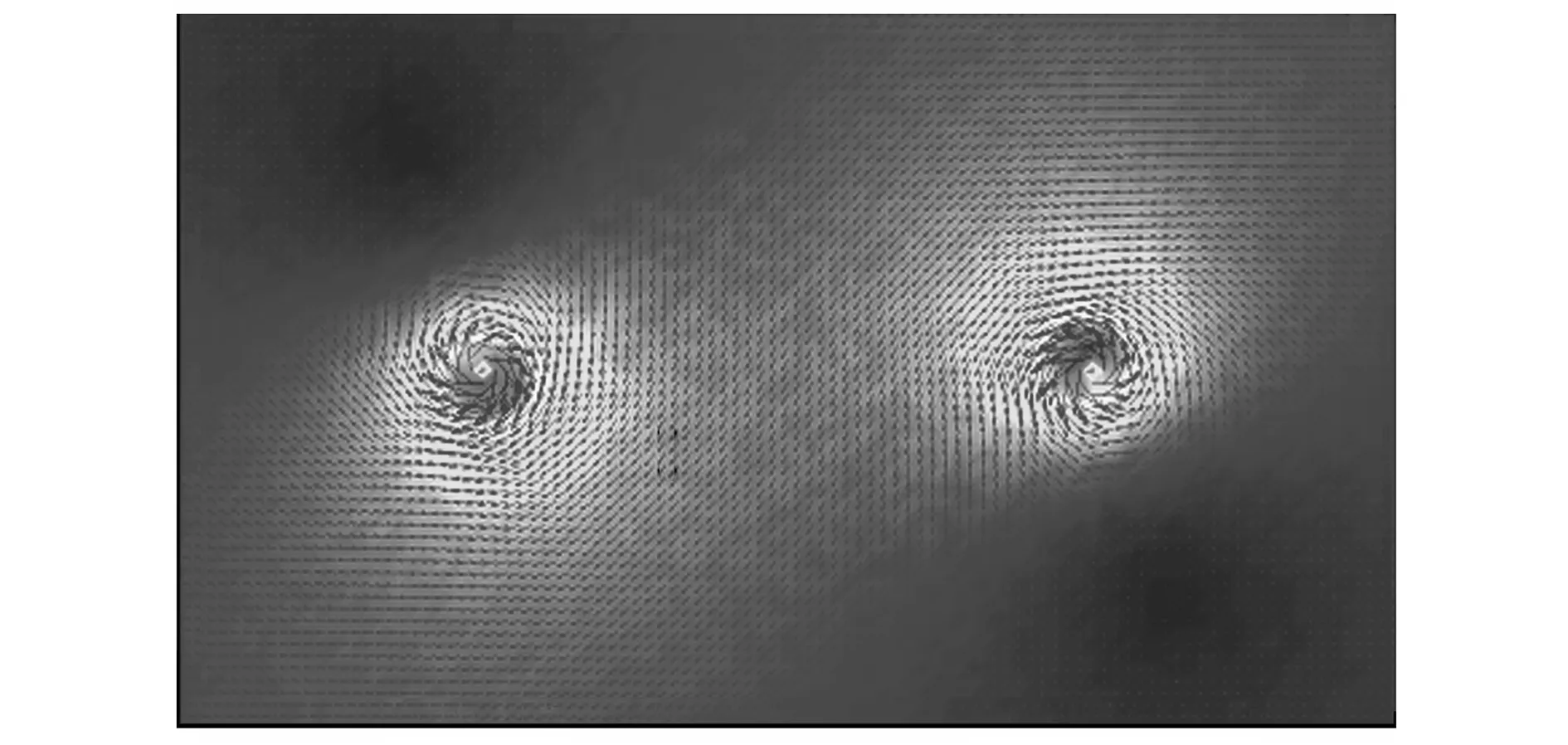
图1 尾流场内的速度分布Fig.1 The velocity distribution of wake vortex
1.2 编队飞行动力学建模
长机尾流对僚机有效风分量及有效风梯度的计算采用构型积分算法,忽略长机尾流对尾翼、襟副翼、设备舱、挂载等结构外形的气动影响。飞机本体六自由度微分方程解算的参数为:
x=[V,α,β,q0,q1,q2,q3,p,q,r,x,y,z] (1)
所得参数经相应的坐标变换、单位转换、微积分变换后得到所需的其他飞行参数,[q0,q1,q2,q3]T即为姿态角转换而来的四元数。
使用Real Time Workshop(RTW)将SIMULINK搭建的运动方程及控制律转化为实时系统VxWorks支持的C代码,并将其下载到实时仿真机,仿真步长为20 ms。
1.3 基于改进线性二次型的编队保持算法
2 构建分布式视景仿真系统
在对尾流情形下的无人机编队飞行建模的基础上,根据分布式仿真系统建模路线[11],构建无人机编队飞行分布式仿真框架,如图2所示。仿真计算延迟小于20 ms,帧速率为50 Hz,仿真单元间的同步误差不高于10 ms。该系统具有开放式分布仿真体系结构,可以根据需要任意扩展或重载具有分布式体系结构的仿真单元,仿真单元间可以互操作,提高了仿真组件的重用性。
各单元的特点及功能如下:
初始化单元:通过Graphical User Interface (GUI)设置初始仿真参数,并对初始编队状态进行配平,通过仿真总线向各单元发送初始化命令及成员初始化信息;然后对仿真中的无人机任务进行规划并将仿真所有权交予编队飞行实时计算单元。
编队飞行计算单元:编队飞行过程中,飞行动力学仿真单元根据规划的无人机指令及地面站操纵信号解算飞机运动方程,僚机通过改进的动态线性二次型算法跟踪长机的飞行状态。
硬件测控单元:响应无人机任务状态,利用仿真总线中的飞参数据对模拟器转台、舵面等硬件设备进行驱动,最终表现为舵面和油门信号的变化。测控系统将从硬件系统采集的舵面和油门信号以数组的格式送入Run Time Infrastructure (RTI) 仿真总线。
虚拟仪表单元:从仿真总线接收仿真计算的数据,转发给各虚拟仪表,驱动仪表参数的变化,从而更加直观、形象地观察无人机的姿态、位置等参数的变化。
视景单元:视景单元主要包括三维视景、二维态势、三维态势三个子单元。当视景单元从总线接到仿真开始交互类后开始等待接收数据。一旦接收到仿真所有权,视景单元根据接收的飞参数组对二维和三维场景中的对象进行控制,并将仿真场景效果实时渲染到最终的显示设备上。
三维视景为我国某地500 km×500 km范围的真实地景;整个飞行场景区域纹理精度为5 m,高程精度为15 m;精细地面目标包括12个机场模型;机场起飞着陆区域小于15 km×15 km,纹理精度为1 m。
二维态势单元接收仿真总线飞行参数的飞机位置和姿态信息,并对真实情况下的二维地图进行实时刷新,不断更新显示态势信息,勾画出飞机的飞行航迹。
三维态势单元对仿真区域内的真实环境进行模拟,并在三维地图上显示飞机航迹和态势的实时变化情况。
数据库单元:当数据库从总线接到仿真开始交互类后开始等待接收数据,一旦接收到仿真所有权后即负责所有仿真数据的记录及存储。
数据回放单元:对整个仿真过程进行二维曲线或三维视景的回放。
评估反馈单元:当从仿真总线中接到仿真结束的交互类后,评估整个编队飞行过程,分析飞参数据。
RTI是分布式接口规范的具体实现,在系统运行过程中为各单元的“同步”和“数据交换”提供公共接口。
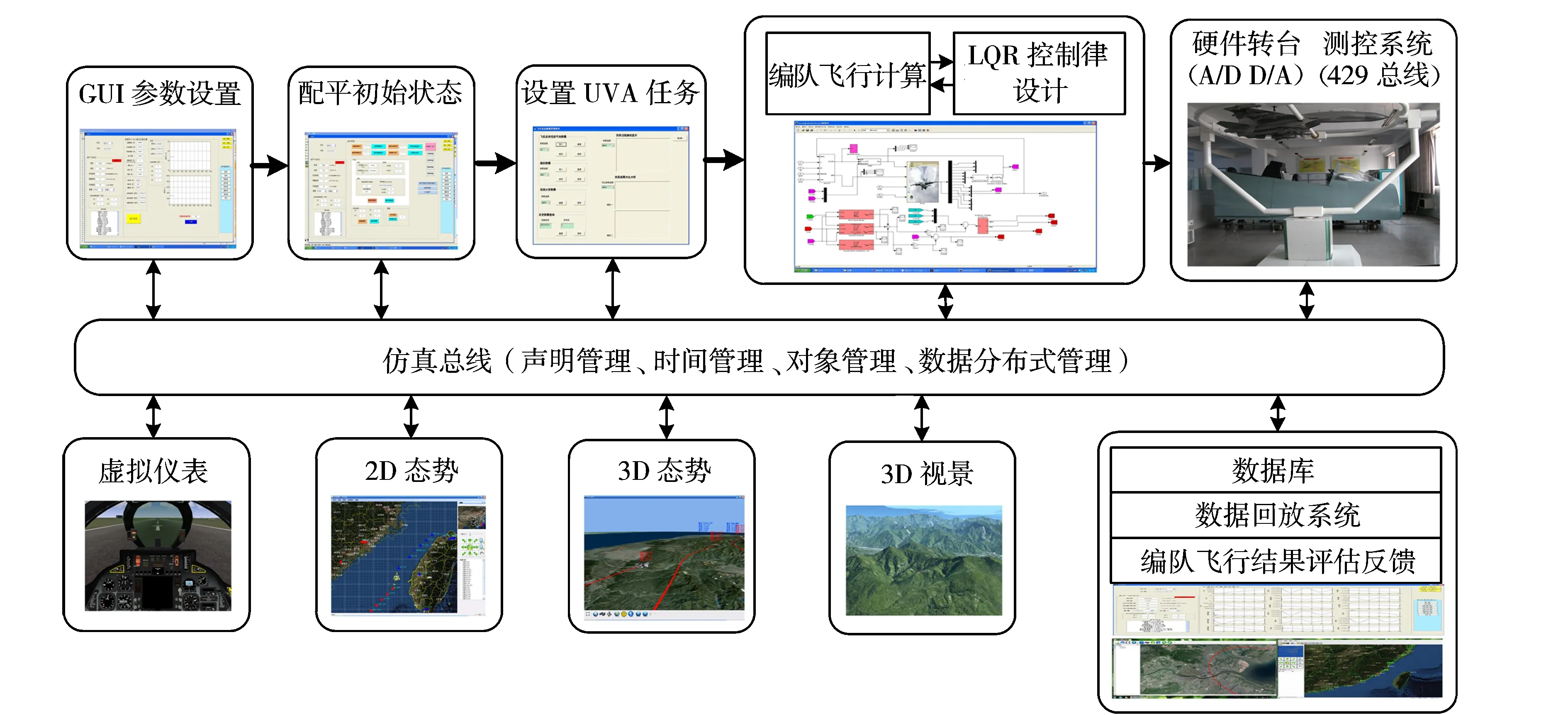
图2 无人机编队飞行分布式仿真系统Fig.2 Distributed simulation system for UAV formation flight
3 YOYO机动仿真及分析
本文对典型的空中战术动作YOYO机动进行模拟仿真。YOYO机动对于无人机规避敌方攻击、撤离任务区域、追踪移动目标等行为具有重要的战术意义,其实质是短时间内势能和动能的转化。在无人机执行任务的过程中,转弯半径随着飞机速度的增大而增大;因此,在短时间内获得较大的转弯角度并建立无人机的指向优势,最有效的手段是拉升一定的高度,使势能增大、动能减小,然后向转弯方向滚转并俯冲下降。
仿真试验地区设置在我国东南某地。试验起始点在某机场上空4 000 m,长僚机编队以速度100 m/s保持配平状态下的匀速飞行,试验开始时的经纬度为(118.583 128°,24.787 605°)。编队状态为典型的V字形编队,僚机位置相对于长机位置在地轴系x,y,z轴上的增量为[-10 m,-8 m,0 m]。
仿真开始时,双机在4 000 m高度以100 m/s的速度保持平飞状态。YOYO机动开始时,长机首先下降到高度3 959.52 m,此时速度为107.75 m/s;右滚转的同时增大飞机的俯仰角使飞机爬升,当仿真时间为99.00 s时速度为67.08 m/s,高度达到4 475.32 m;之后调整升降舵使飞机迅速低头并增大滚转角,飞机开始快速转弯并急剧掉高度,当仿真时间为136.00 s时速度为146.88 m/s,高度为3 724.49 m,偏航角达到180°,完成了180°转向;此后,长机继续右滚转,当仿真时间达到151.40 s时,速度达到本次仿真的最大值164.93 m/s,高度为3 333.21 m。在长机执行YOYO机动的过程中,僚机跟踪长机状态进行编队伴随飞行。在155.81 s时仿真结束,此时经纬度坐标为(118.613 039°,4.814 918°),仿真过程及结果如图3~图5所示。
图3为仿真过程的飞行轨迹,可以看出双机编队经YOYO机动后偏航角增大了180°以上,获得了较大的指向优势。无人机编队通过YOYO机动使偏航角变化180°所需的时间为136 s,比定常盘旋变化180°偏航角所需的200~300 s约快一倍。图4为本次仿真过程中无人机编队在不同时刻的视景截图。图5为仿真过程中长僚机主要参数的变化情况,僚机跟踪长机各参数的均方差不超过5%。
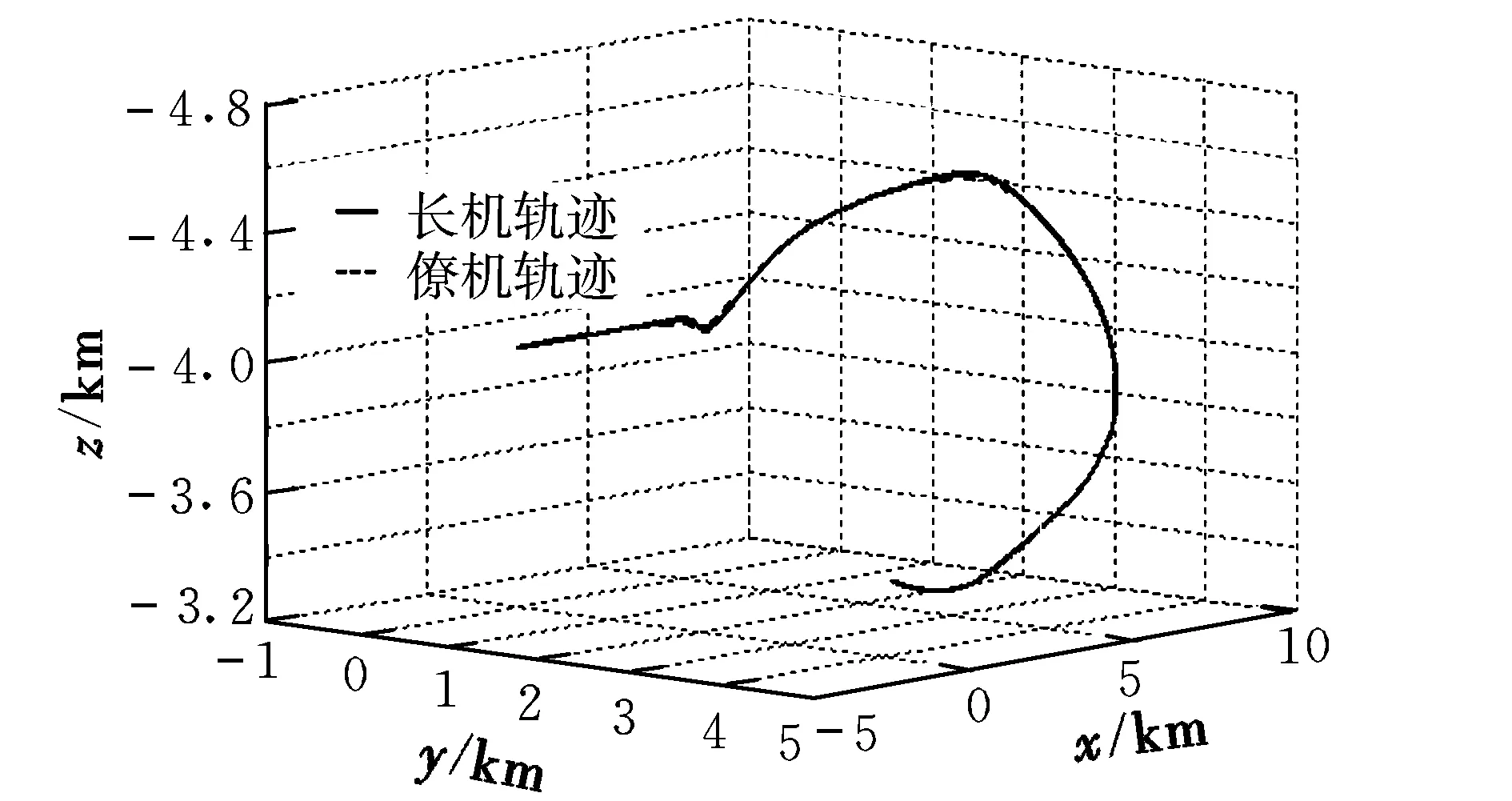
图3 无人机编队进行YOYO机动的飞行轨迹Fig.3 The flight path during YOYO maneuver

图4 无人机编队进行YOYO机动的3D仿真视景Fig.4 3D visual simulation of UAV formation flightduring YOYO maneuver
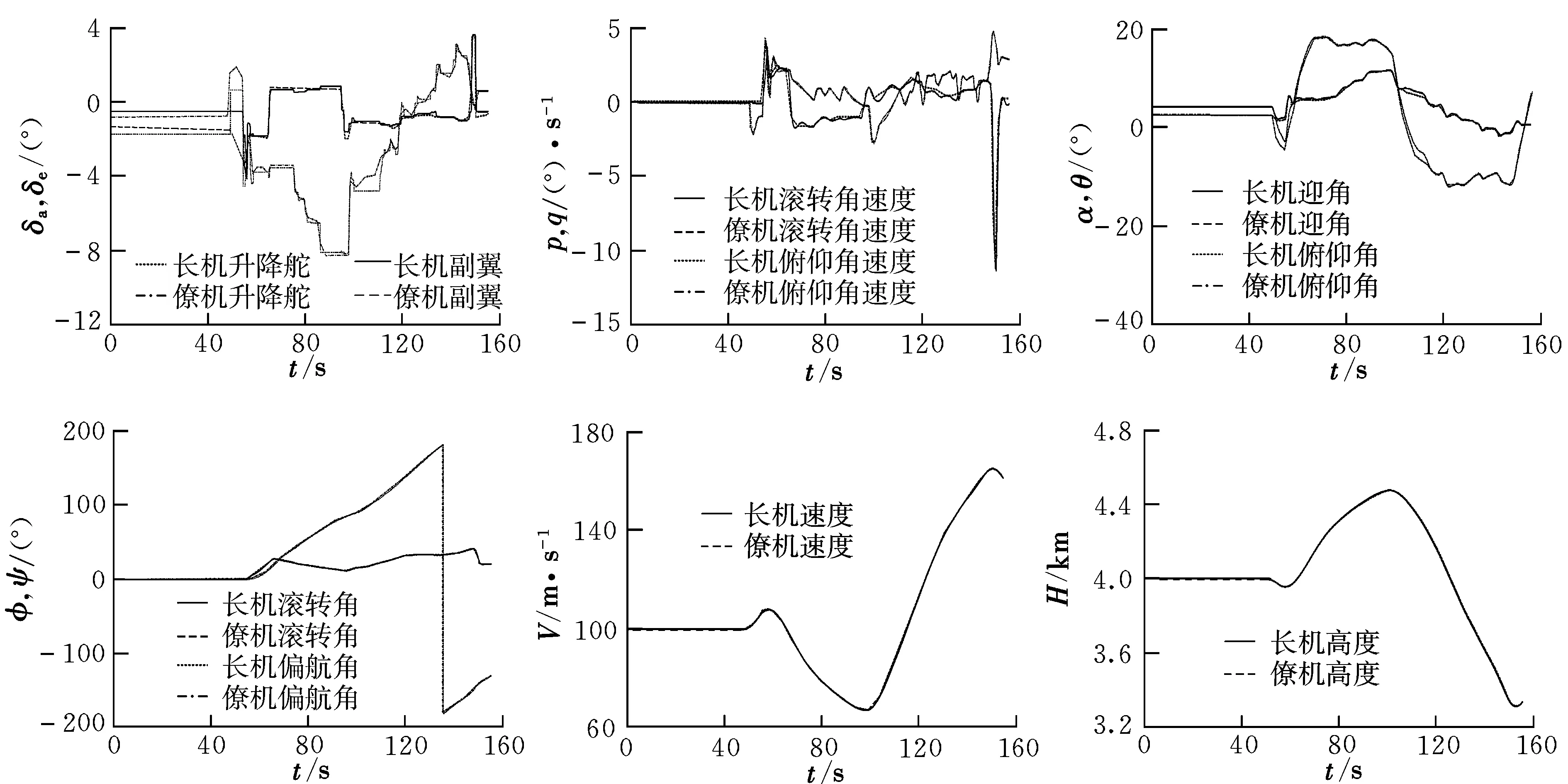
图5 仿真过程中的长僚机参数变化Fig.5 Flight parameters of UAVs during the simulation
由图5可以看出,在初始的配平状态,僚机的副翼偏角为-1.362°。这是由于长机尾流对僚机产生了滚转力矩增量,使得僚机有向左滚转的趋势,故僚机副翼偏转以配平尾流引起的滚转力矩。初始配平状态时长机升降舵偏角为-1.739°、迎角为4.493°、俯仰角为4.493°,而僚机升降舵偏角为-0.820°、迎角为2.770°、俯仰角为2.770°,这是由于长机尾流对僚机的升力系数产生了增量,使得僚机有向上的升力增量,故僚机不必保持和长机相同的迎角来获得配平升力。综上所述,如果编队飞行的配平状态不考虑尾流影响,将会使得计算所得僚机操纵面偏角与有尾流影响的真实情况存在较大误差。因此,在工程应用中应考虑长机尾流诱导的升力增量和滚转力矩作用,通过飞控动态调整舵面以保持编队飞行状态。
通过对图5中飞行参数的分析,可看出在YOYO机动的过程中,长机尾流对僚机的影响不是一个持续的过程,其影响程度主要取决于长僚机相对姿态角的大小。在YOYO机动的初始阶段和结束阶段长僚机的相对姿态较小,僚机受到尾流的影响较大。例如在YOYO机动开始之后,长机升降舵偏转使得俯仰角从初始的4.493°开始减小,在此过程中,长僚机的相对姿态角减小,长机尾流对僚机的作用增强,僚机的升力系数显著增加。而僚机副翼偏角此时由于尾流作用的加强而增大偏转角度。在67 s后,随着滚转角的增大,长机尾流轨迹的位置偏离僚机机翼表面,使得尾流对僚机的影响逐渐减弱,观察图5亦可发现,67 s后僚机和长机副翼、升降舵的响应较为接近,姿态角的变化情况也较为一致。
YOYO机动的仿真结果表明了所设计的控制系统具有较强的鲁棒性和自适应跟踪性能。视景单元在YOYO机动过程中表现出了较好的稳定性和可靠性,对编队飞行的模拟效果较为形象直观。分布式系统中飞参数据由计算单元向视景单元传输的同步性和实时性亦得到验证。
4 结束语
本文构建了编队飞行时长僚机动力学模型和尾流场模型,设计了僚机跟踪控制算法。将尾流效应考虑到无人机编队飞行的仿真计算当中,使其更加符合真实的编队飞行状况;建立了真实地理信息下高保真度的视景单元,其沉浸感和参与感较强;定量分析了YOYO机动过程中僚机受到的尾流影响和对长机状态的跟踪情况。分布式无人机编队视景仿真方法具有较高的保真度,可以实现无人机编队飞行研究中的宏观与微观、定性分析与定量分析相结合;可作为预研性的仿真试验工具,同时也为其他类似的飞行仿真试验系统的设计提供了一定的参考经验。
参考文献:
[1] 樊琼剑,杨忠,方挺,等.多无人机协同编队飞行控制的研究现状[J].航空学报,2009,30(4):683-691.
[2] 李文皓,张珩.无人机编队飞行技术的研究现状与展望[J].飞行力学,2007,25(1):9-11.
[3] Ning S A,Flanzer T C,Kroo I M.Aerodynamic performance of extended formation flight[J].Journal of Aircraft,2011,48(3):855-865.
[4] Dogan A,Venkataramanan S.Modeling of aerodynamic coupling between aircraft in close proximity[J].Journal of Aircraft,2005,42(4):941-955.
[5] Blake W,Gingras D.Comparison of predicted and measured formation flight interference effects[J].Journal of Aircraft,2004,41(2):201-207.
[6] Jake V M,Ray R J,Ennix K,et al.F/A-18 performance benefits measured during the autonomous formation flight project[R].NASA/TM-2003-210732,2003.
[7] 朱杰斌,秦世引.无人机编队飞行的分布式控制策略与控制器设计[J].智能系统学报,2010,5(5):392-399.
[8] Binetti P,Ariyur K B,Krstic M,et al.Formation flight optimization using extremism seeking feedback[J].Jouranal of Guidance,Control,and Dynamics,2003,26(1):132-142.
[9] 肖亚辉,王新民,王晓燕,等.无人机三维编队飞行模糊PID控制器设计[J].西北工业大学学报,2011,29(6):834-838.
[10] 宋敏,魏瑞轩,沈东,等.基于非线性动态逆的无人机编队协同控制[J].控制与决策,2011,26(3):448-452.
[11] 韩守鹏.分布式仿真系统动态重构技术研究[D].长沙:国防科学技术大学,2007.
[12] Gerz T,Holzäpfel F,Darracq D.Commercial aircraft wake vortices[J].Progress in Aerospace Sciences,2002,38(3):181-208.
猜你喜欢
小哥白尼(军事科学)(2021年4期)2021-07-28
西安航空学院学报(2020年5期)2020-12-08
小学科学(学生版)(2020年8期)2020-08-24
小哥白尼·趣味科学画报(2020年1期)2020-06-09
电子测试(2018年4期)2018-05-09
时代青年(上半月)(2017年1期)2017-02-09
山东冶金(2015年5期)2015-12-10
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
空间控制技术与应用(2009年2期)2009-12-20