小型电动力四旋翼坐地起降无人机设计研究
2014-09-15 03:44吴超胡峪王刚
飞行力学 2014年3期
吴超, 胡峪, 王刚
(西北工业大学 航空学院, 陕西 西安 710072)
0 引言
同时具备垂直起降和高速高效飞行的飞行器是近年来航空领域的研究热点之一,坐地起降飞机是其中的一种。坐地起降飞机是指起飞和降落时尾部着地,机身机头竖直向上的飞机。相比于其它垂直起降飞机,坐地起降飞机结构简单,对起降环境要求低,既可以像旋翼机一样起飞及悬停,又可以像固定翼飞机一样高效巡航,是垂直起降转高速平飞飞机中相对简单且性能较好的一种形式。
常规的坐地起降飞机有单桨[1]、共轴双桨[2]和并列双桨[3]等形式,悬停时的姿态控制以及飞机姿态转换依靠大面积的副翼和方向舵。其缺点是无法兼顾平飞和悬停阶段对推进系统的要求,导致推进系统效率降低,近地面悬停时螺旋桨滑流遇到地面干扰,导致舵面效率降低,飞机难以精确操纵。为此,本文提出一种新型坐地起降无人机,采用飞翼布局形式,利用四旋翼布局进行悬停时的姿态控制。
1 设计思想
1.1 悬停状态下的配平
常规坐地起降飞机在起降和近地面悬停时,由于地面的干扰导致飞机的操纵性恶化,难以实现精确的悬停飞行。四旋翼布局采用多个螺旋桨的拉力差来实现飞机的稳定飞行,可以很好的解决该问题。
四旋翼坐地起降无人机尾部上、下方及左右机翼各有一个螺旋桨,呈十字形分布。起飞阶段四个螺旋桨共同作用产生推力,使飞机悬停或垂直爬升。当垂直爬升速度超过平飞失速速度后进入姿态转换阶段,无人机尾部上方的桨增加转速产生低头力矩,与升降副翼偏转产生的低头力矩一起调整无人机姿态直至平飞。进入平飞阶段仅由机尾下方的桨产生推力,螺旋桨推力线下移,飞机阻力和推力相对于飞机重心形成抬头力矩,因此机翼可以采用正弯度翼型。机翼产生的低头力矩可以由螺旋桨推力和阻力形成的力偶部分配平,从而使机翼升力分布更接近椭圆形升力分布,降低配平阻力,缓解静稳定飞翼布局飞机操稳特性与飞行性能之间的矛盾。四旋翼布局坐地起降无人机如图1所示。
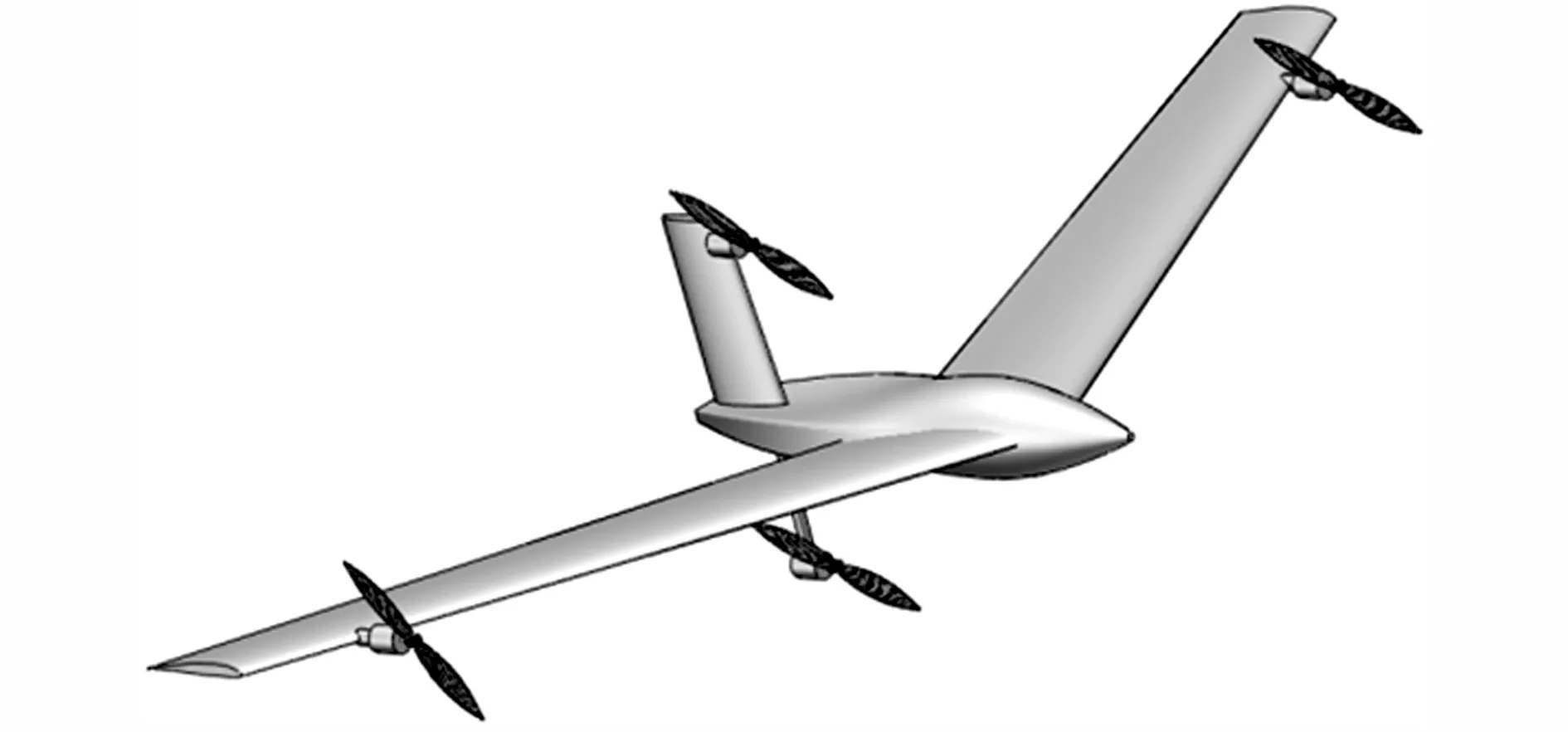
图1 四旋翼布局坐地起降无人机Fig.1 Quad-rotor tail-sitter UAV
1.2 动力系统效率
常规坐地起降无人机在垂直起降和悬停阶段需要大功率的动力系统,而平飞时对动力系统的功率要求则相对较低。由于悬停和前飞的工况不同,效率最高的螺旋桨的设计参数也不同;因此常规的坐地起降飞机的动力系统难以兼顾垂直起降和平飞的要求,使得动力系统的效率难以达到最优。四旋翼坐地起降无人机在垂直起降和悬停时使用多旋翼提供升力,平飞时只利用其中的一个动力组提供推力,其他动力组折叠收起;因此可以针对起降和平飞分别设计和选择推进效率最佳的电机和螺旋桨,以保证动力系统兼顾两种飞行状态下的高效率。
1.3 动力配平
螺旋桨动力配平是指将飞翼布局飞机的螺旋桨推力线下移,使飞机阻力和推力相对飞机重心形成抬头力偶,增大全机零升力矩,减小配平所需升降副翼偏角和外洗角度,从而提高飞机在巡航和定常盘旋飞行中的升阻比。
常规坐地起降无人机采用舵面配平,为保证足够的纵向配平力矩,须选择长机身或者大面积的尾翼,引起结构质量增加。采用动力配平的四旋翼坐地起降无人机仅需较短的主机身,无需平尾,极大地减轻了结构质量。四旋翼动力配平坐地起降无人机平飞时只有一个螺旋桨工作,即机尾下面的螺旋桨提供推力,实现了推力线下移即动力配平。通过选择合适的下移高度,即可使推力所产生的抬头力矩平衡升力所产生的低头力矩。
2 参数计算模型
2.1 总体参数计算模型
四旋翼坐地起降无人机总体参数计算模型流程如图2所示。根据任务目标,拟定基本几何参数并进行布局设计,建立质量模型、效率模型和气动模型。迭代计算后,重量收敛则输出各项参数,否则重新进行总体设计。

图2 总体参数计算模型流程图Fig.2 Flow chart of configuration parameter model
2.2 推进系统效率模型
无人机推进系统主要由电池、电子调速器、电机以及螺旋桨构成。为降低动力系统效率损失,本文选择电机直接驱动螺旋桨的传动方式。根据文献[4]的电调计算结果,电调效率取值为85%。
推进系统效率为:
η=ηm×ηp×0.85 (1)
式中,ηm为电机效率;ηp为螺旋桨效率。
由文献[5]可得电机效率的计算模型,文献[6]可得螺旋桨前飞状态的效率模型,文献[7]可得螺旋桨悬停状态效率模型。
利用螺旋桨效率模型结合遗传算法优化计算前飞状态以及悬停状态时的螺旋桨参数。四旋翼坐地起降无人机前飞状态螺旋桨的优化结果如图3所示。遗传代数为50代,种群个数为500。
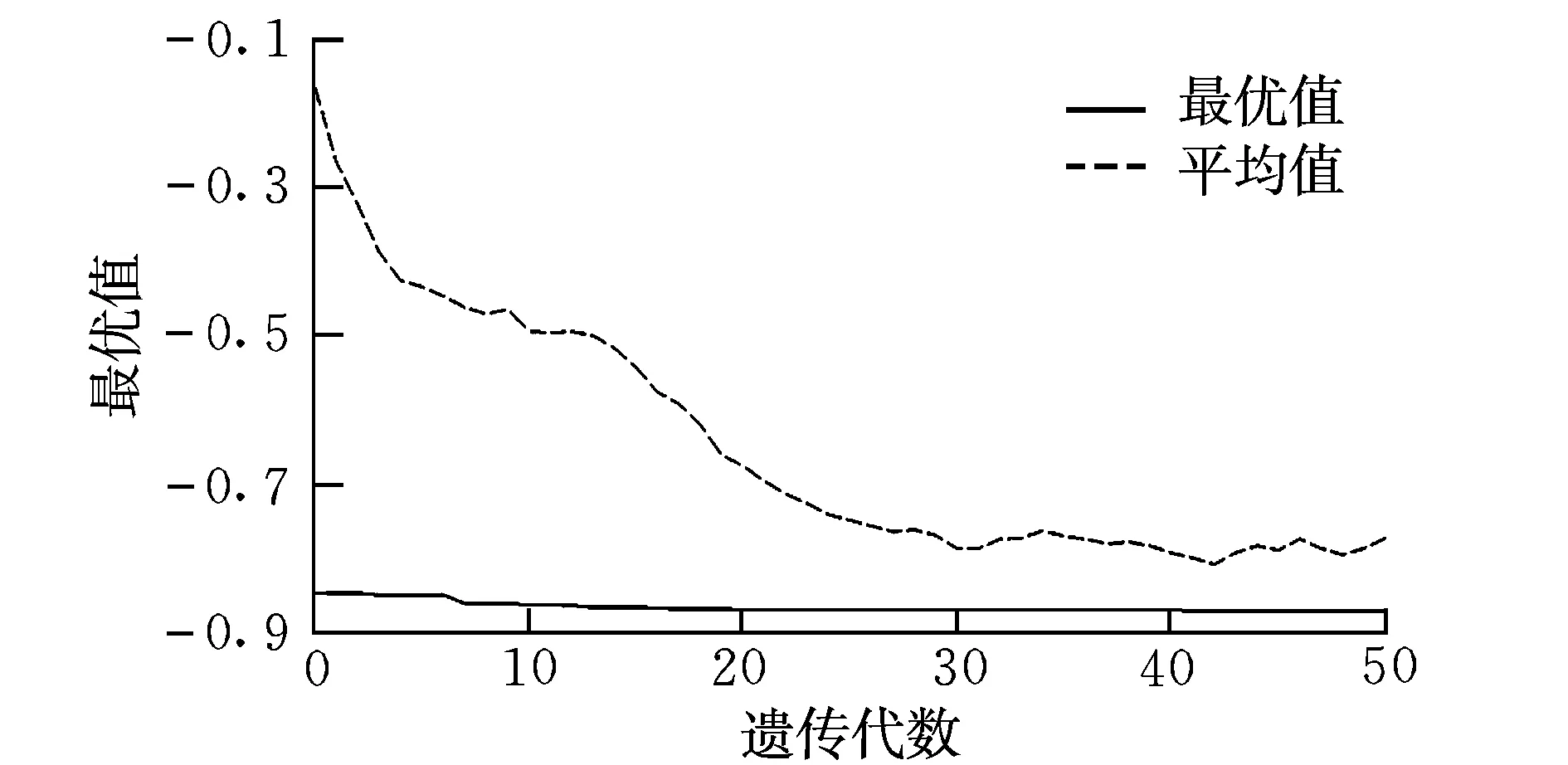
图3 螺旋桨效率优化结果Fig.3 Propeller efficiency optimization result
2.3 质量模型
无人机质量包括结构质量、电池质量、电机质量和载重。电池质量和电机质量合称推进系统质量。载重固定为1 kg,初步计算电机质量时根据所需功率估算。
Wm=(0.2634Pm+18.3)×10-3(2)
式中,Wm为电机质量;Pm为电机功率。
结构质量包括机翼质量、机身质量及尾翼质量等。机翼主要包括蒙皮、前后梁和翼肋的质量,分别使用玻璃钢、航空层板和轻木。机身主要包括机身蒙皮、隔框和桁条等。蒙皮使用航空层板,隔框和桁条使用轻木。尾翼参考机翼推导公式,对各部位结构质量分别进行估算,最后相加得到全机结构质量。
电池质量主要由电池容量和电池比容量决定,本文选取性能较好的聚合物锂离子电池作为能源。在实际工作中,聚合物锂离子电池有效容量依赖于放电电流。电池放电的同时电压会缓慢下降,其变化规律接近线性。输出功率不变时,则电流缓慢上升。对于给定的电池容量和输出功率,根据文献[8],通过数值积分来求解变电压条件下电池的放电时间,可计算出无人机飞行时,不同输出功率条件下的放电时间。利用计算所得数据,插值可得无人机飞行各个阶段所需电池容量,从而得到电池质量。
2.4 气动模型
利用Matlab软件下的tornado计算模块,对无人机进行几何建模。在给定状态参数后由tornado计算得到无人机的升力系数、阻力系数、力矩系数等气动参数,根据计算结果选取最佳升阻比时为巡航状态,以取得最优的巡航效率。
3 参数对比分析
3.1 推进系统效率对比
根据建立的总体设计模型,对所设计四旋翼布局和常规布局的坐地起降无人机总体参数进行计算,并进行对比分析。效率对比结果如图4所示。

图4 推进系统效率对比Fig.4 Comparisons of propulsion system efficiency
电调效率按照85%估算,推进系统效率主要由电机效率和螺旋桨效率决定。电机效率由电机参数和电机工作状态决定,通过对不同的电机进行计算,选择合适的电机,并完成了电机特性曲线的测绘实验来验证计算结果,结果表明各飞行状态下的电机效率基本能达到80%以上。
四旋翼布局坐地起降无人机针对平飞和悬停分别设计了高效的螺旋桨,因而在起降和悬停时螺旋桨效率明显高于常规布局。平飞时四旋翼布局坐地起降飞机推进效率略高,但是由于飞机航时、航程对推进效率十分敏感,因此四旋翼坐地起降飞机仍然具备很好的性能优势,可以认为四旋翼布局的推进系统效率总体上优于常规布局。
3.2 升力阻力对比
常规布局机翼后掠角小、无扭转,但是结构质量更大,故相同条件下巡航升力系数比四旋翼布局高,升力系数的增加带来诱导阻力系数的增加,因而常规布局诱导阻力高于四旋翼布局。此外,四旋翼布局采用动力配平,减小了配平阻力且具备比常规布局具有更小的浸湿面积和更轻的结构质量。浸湿面积减小,降低了零升阻力,因此四旋翼布局升阻比高于常规布局;高升阻比降低需用推力和电机需用功率,极大地改善了全机性能。升阻比对比结果如表1所示。
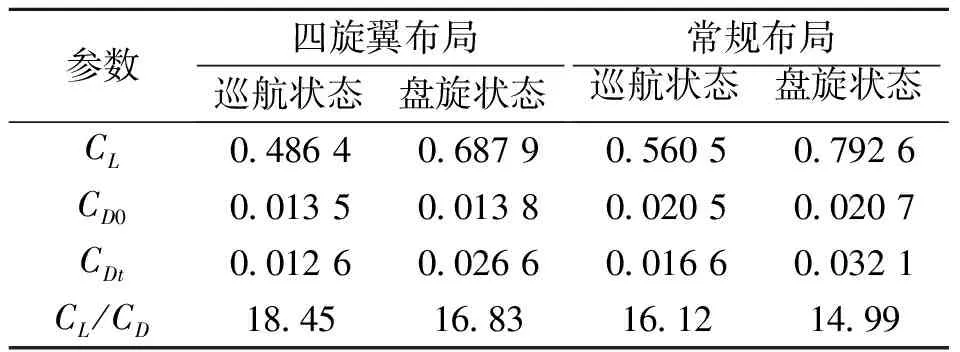
表1 升阻参数Table 1 Lift and drag parameters
3.3 质量对比
虽然四旋翼布局的电机质量比常规布局重106 g,但电池质量和结构质量分别比常规布局减少了427 g和302 g。最终四旋翼布局总质量为3 652 g,常规布局总质量为4 264 g,即航时同样为120 min时,四旋翼布局无人机质量比常规布局减轻了14.3%。固定起飞总质量为4 kg时,四旋翼布局航时为154 min,常规布局为108 min,此时四旋翼布局比常规布局航时增加了42%,其性能较常规布局有明显优势。质量对比结果如图6所示。
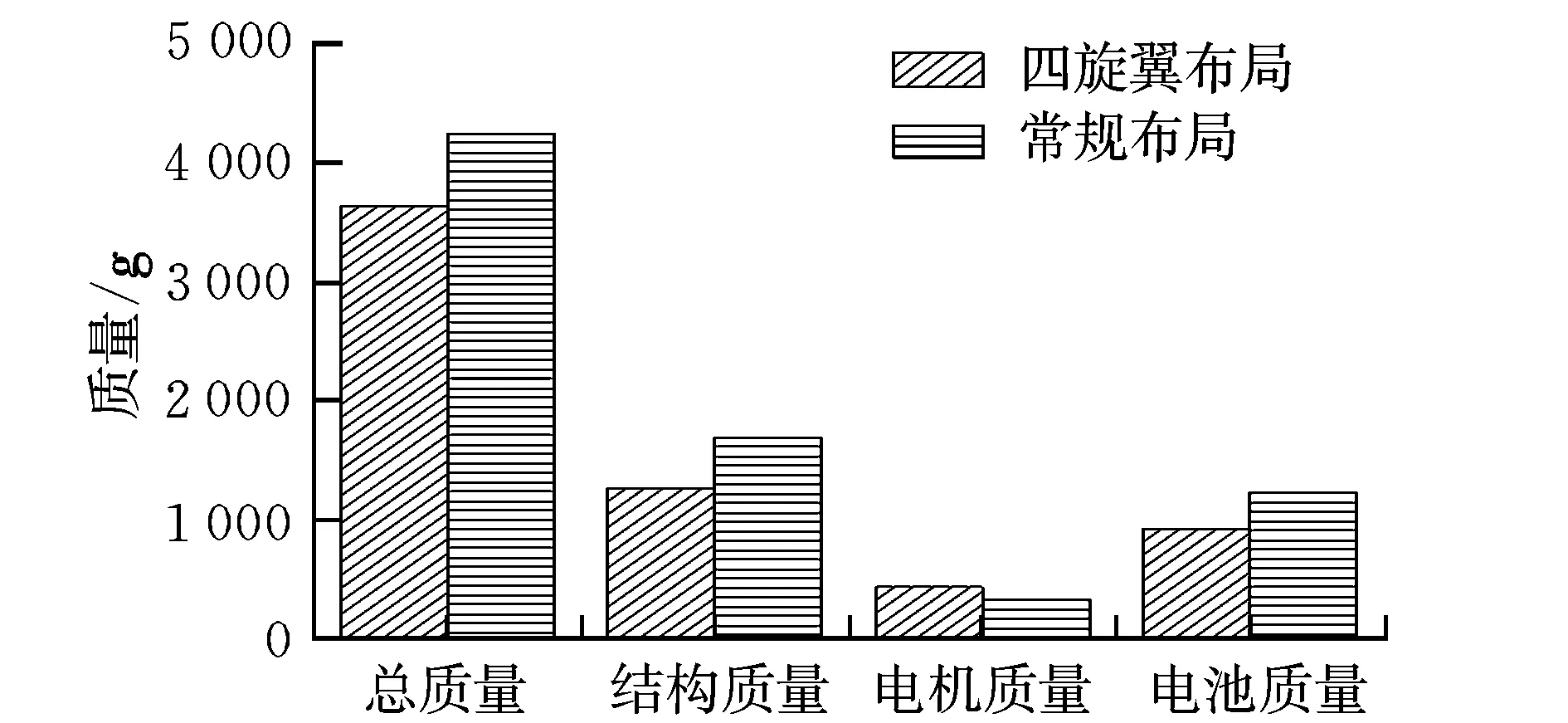
图5 质量对比Fig.5 Comparisons of mass
4 结论
通过分析、比较常规布局和四旋翼布局坐地起降无人机的性能,得出以下结论:
(1)四旋翼布局坐地起降无人机可以有效地解决垂直起降和平飞阶段对动力系统要求的矛盾,其推进系统效率高于常规布局。
(2)四旋翼布局坐地起降无人机可以利用动力配平进一步提高飞行性能。
(3)同样航时,四旋翼布局坐地起降无人机质量轻于常规布局;相同质量时,四旋翼布局坐地起降无人机的航时大大超过常规布局形式。
参考文献:
[1] Shields M C,Hatcher C M,Pitcairn R A,et al.Design and development of reconnaissance micro air vehicle and launch system[R].American Institute of Aeronautics and Astronautics,2007.
[2] Shkarayev S,Moschetta J M,Bataille B.Aerodynamic design of VTOL micro air vehicles[C]∥US-Europen Competotion and Workshop on Micro Air Vehicle Systems & European Micro Air Vehicle Conference and Flight Competition.Toulouse,France,2007.
[3] Daisuke Kudo.Study on design and transitional flight of tail-sitting VTOL UAV[R].International Congress of Aerpnautical Sciences,2006.
[4] Lawrence D,Mohseni K.Efficiency analysis for long-duration electric MAVs[R].AIAA-2005-7090,2005.
[5] Jones J L,Flynn A M.Mobile robots-inspiration to implementation [M].Wellesley:A K Peters,Ltd,1999:203-213.
[6] 刘沛清.空气螺旋桨理论及其应用[M].北京:北京航空航天大学出版社,2006:75-82.
[7] 王适存.直升机空气动力学[M].南京:航空专业教材编审组,1985:24-27.
[8] Traub L W.Range and endurance estimates for battery-powered aircraft [J].Journal of Aircraft,2011,48(2):703-707.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
学习周报·教与学(2020年25期)2020-10-21
航空发动机(2020年3期)2020-07-24
电子制作(2019年9期)2019-05-30
中学生数理化·中考版(2018年10期)2018-12-07
理科考试研究·高中(2017年7期)2017-11-04
兰台世界(2017年10期)2017-06-01
科技风(2017年21期)2017-05-30
北京航空航天大学学报(2016年8期)2016-11-16