基于UAV飞行航迹包络的即时航迹评估方法
2014-09-15 03:44雷刚张大巧董敏周
飞行力学 2014年3期
雷刚, 张大巧, 董敏周
(1.西北工业大学 航天学院, 陕西 西安 710072;2.第二炮兵工程大学 701教研室, 陕西 西安 710025)
0 引言
实现以飞航飞行器为代表的无人机(unmanned aerial vehicle,UAV)最优(准优)即时航迹规划选择是一项时效性强、可靠性要求高的任务。在规划出的多条即时可行航迹中,选择更为恰当的航迹传送至弹上,以提高飞航UAV的作战效能是作战保障的重要内容和任务。战场环境、UAV实时状态、敌方对策等多种复杂因素对UAV作战性能的非线性影响,致使指挥人员很难判断航迹的优劣性,影响其航迹选择的决策。
本文分析了UAV的即时航迹特点,结合UAV飞行包络建立各项评估指标计算模型,提出UAV航迹优劣的变权综合评估模型,实现了对即时规划航迹指标的计算和评估。
1 UAV即时航迹特性分析
UAV即时航迹规划是在原有飞行航迹的基础上,根据新的战场环境、情报及打击目标需求,建立从默认航迹分叉点到新目标或其它分叉点间的快速可行航迹规划任务[1-2]。其典型即时航迹包括突现目标打击航迹、突现威胁规避航迹、预定区域徘徊航迹等,具体如图1所示。
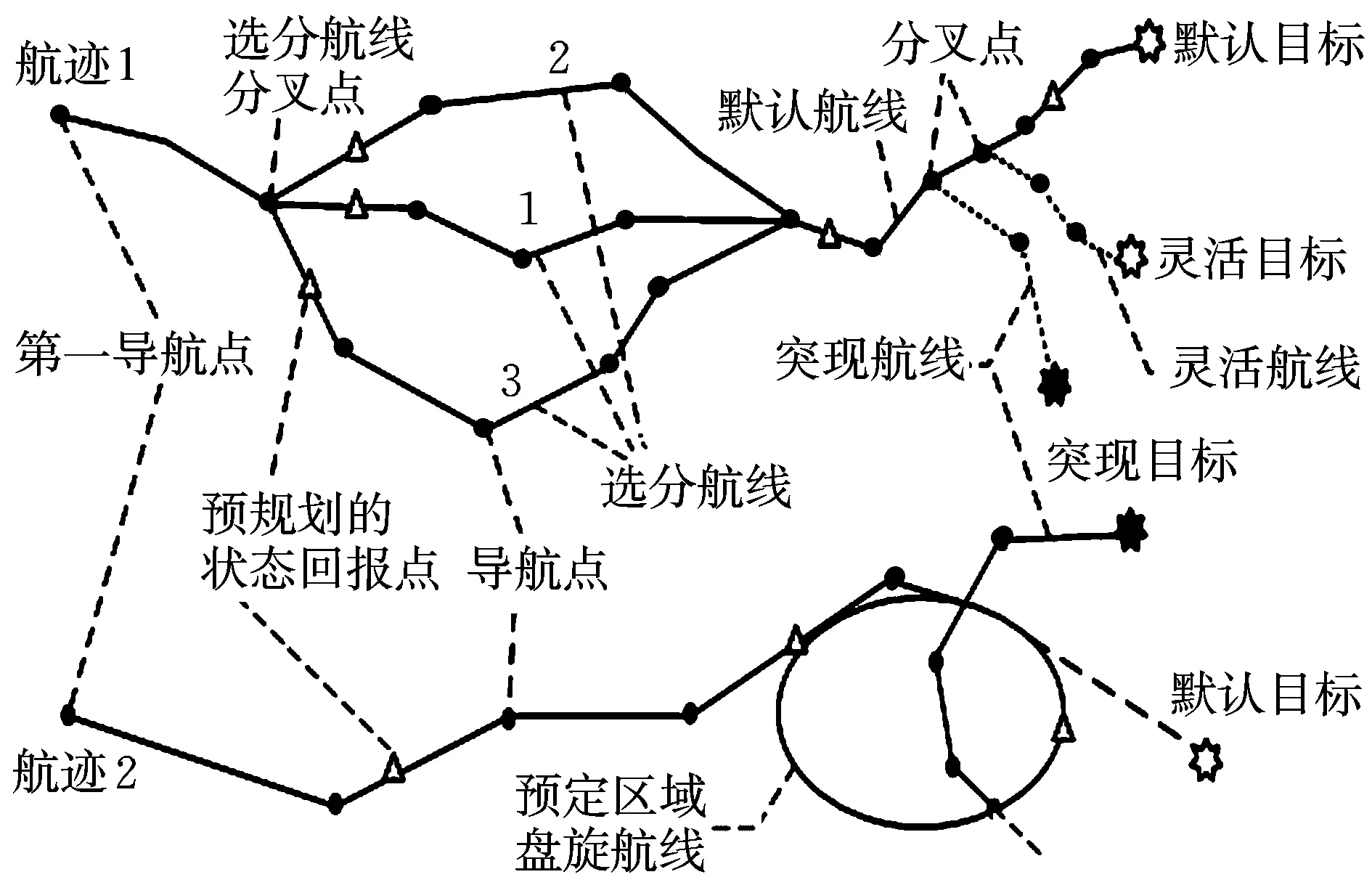
图1 UAV即时航迹Fig.1 Real-time paths of UAV
2 即时航迹评估指标的分析与确定
UAV即时航迹应满足UAV本身飞行性能限制、本次飞行任务限制、突防能力、机动能力等指标要求。因此,考察一条航迹,可分成两个步骤进行[3]:(1)考察即时航迹是否满足UAV本身飞行性能限制和本次飞行任务限制,判断此航迹是否可行;(2)如果即时航迹是可行航迹,则考察航迹的突防能力、机动能力等指标,给出航迹的优劣;如果航迹不可行,则评价结束。
对于即时航迹的可行性判断,主要考察航迹长度、航迹数据的传输时间、水平转弯角、俯冲/爬升角、最小航迹段长度和目标进入方向等几类航迹可行的评估指标。
对于可行即时航迹的优劣评估,主要是结合航迹优劣的评估指标对航迹进行二次评估,包含突防能力指标、机动能力指标和任务执行力指标等。
3 UAV航迹飞行包络确定
在UAV飞行中,其本身的各种误差、飞行环境误差及射击准备误差等因素影响飞行器的实际飞行,从而使飞行器偏离规划航迹,所有可能的实际飞行航迹集合起来形成的管道叫飞行包络,飞行包络的中心线为参考航迹。由于航向控制和纵向控制的形式也不一样,因此对航向、纵向的飞行包络误差影响因素分别开展研究。
3.1 航向飞行误差分析与包络计算
在UAV飞行航向方向上,飞行误差主要有导航制导误差ΔZ1、瞄准误差ΔZ2、控制系统误差ΔZ3、命中目标误差ΔZ4。航向飞行包络(飞行包络半宽ΔσZ)的计算方法为:
(3)末段:ΔσZ=ΔZ4。 各段飞行包络连接要用光滑曲线连接,该光滑曲线要满足UAV航向转弯机动能力要求,即曲线的曲率半径要大于航向最小转弯半径。
3.2 纵向飞行误差分析与包络计算
UAV飞行纵向误差包括静压误差ΔH1、气压高度/速度测量误差ΔH2、大气温度变化误差ΔH3、大气等压面倾斜误差ΔH4、数字高程图误差ΔH5、雷达高度表误差ΔH6、离地高度测量误差ΔH7、高度测量控制误差ΔH8。纵向飞行包络(飞行包络ΔσH半宽)应按不同高度测量方法和控制方法确定。
(1)气压高度测量段飞行包络半宽:
(1)
(2)雷达高度测量段飞行包络半宽:
(2)
3.3 基于误差综合法的UAV飞行包络仿真
航向飞行包络的确定方法是以航向参考航迹为中心,根据飞行误差计算出飞行包络的半径,进而确定飞行包络。纵向飞行包络的确定方法是以纵向参考航迹为中心,按误差模型计算飞行包络半径,进而确定出纵向飞行包络[4]。其具体计算模型可参见文献[4]。UAV飞行包络在水平面和垂直面的投影分别如图2、图3所示。
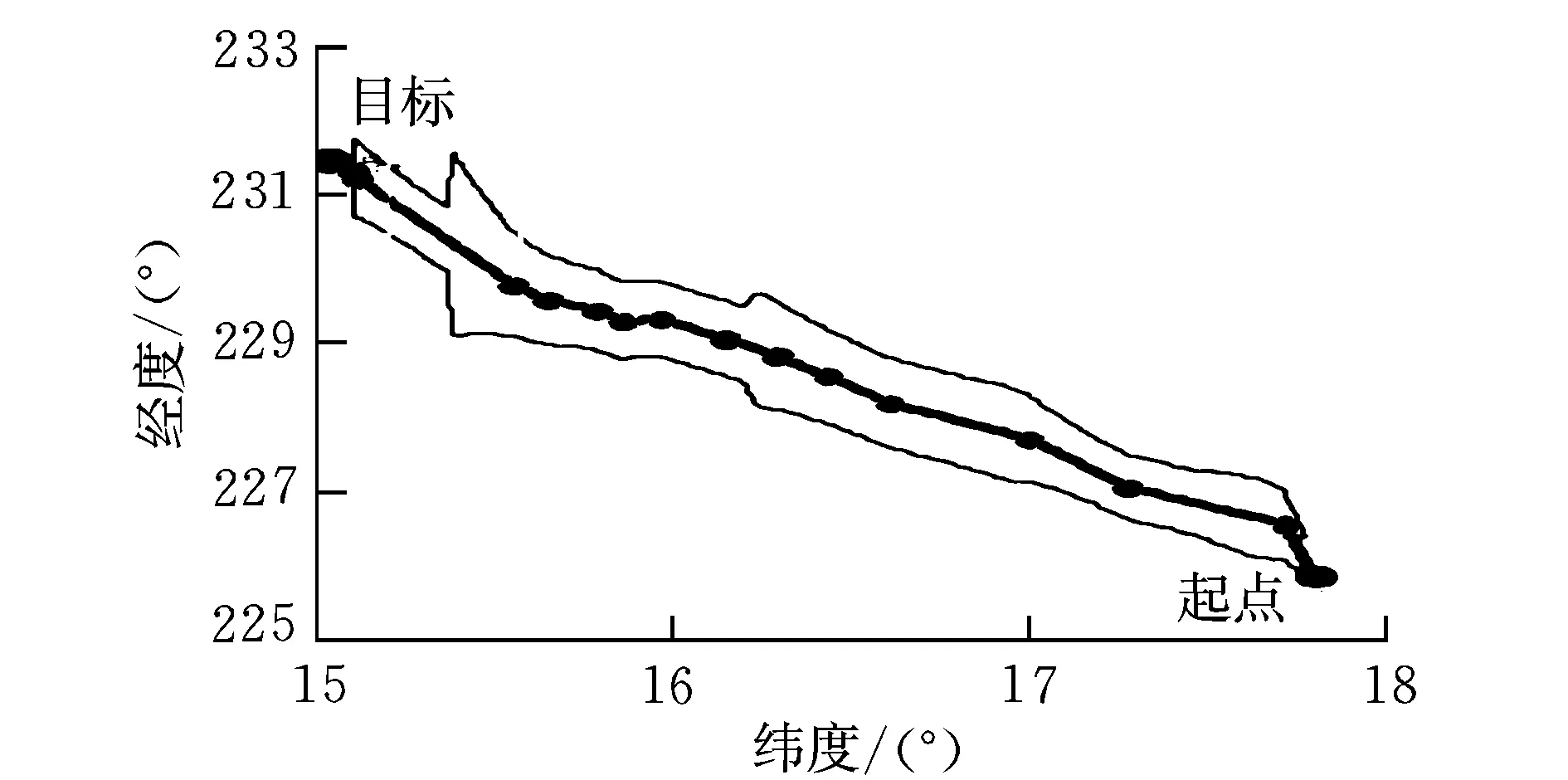
图2 UAV飞行包络水平面投影Fig.2 Horizontal projection of UAV flight envelope
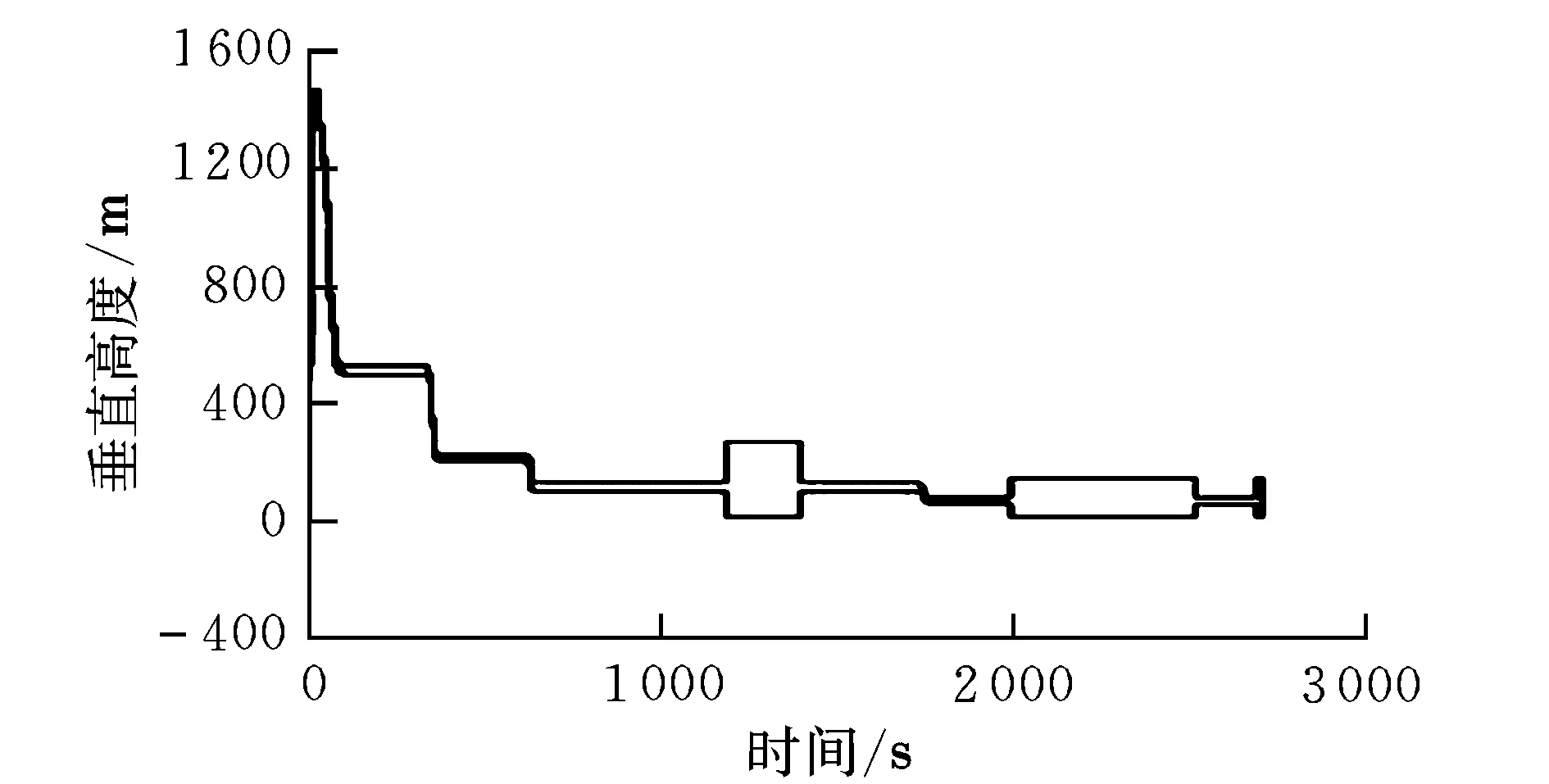
图3 UAV飞行包络垂直面投影Fig.3 Vertical projection of UAV flight envelope
4 基于飞行包络的航迹评估指标计算
4.1 被摧毁概率
由于UAV的实际飞行航迹存在偏差,因此基于飞行包络的被摧毁概率可以更好地描述UAV实际飞行中对防空武器的突防能力,其计算模型如图4所示。
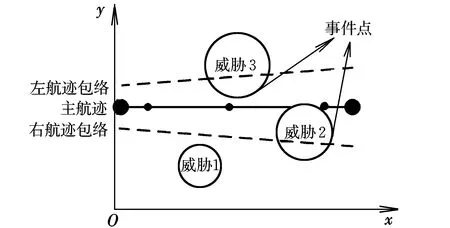
图4 基于航迹包络的威胁计算Fig.4 Path threats calculation based on path envelope
假设航迹由n条航迹段组成,vi,vi+1为航迹段i的两个导航点,对应的坐标值为(pxi,pyi),(pxi+1,pyi+1);且作战区域内的威胁信息为(xr,yr,zr,R,η),其中,xr,yr,zr为威胁的坐标值,R为各威胁的有效范围,η为威胁强度。设第s个威胁中心到航迹段i的距离为Di(s),则第s个威胁对沿航迹段i飞行的UAV的摧毁概率为:
(3)
式中,ks为航迹段ij是否穿越了威胁;Pdm(s)为第s个威胁源的发现概率;ηs为威胁强度且ηs∈(0,1),强度越大,ηs越大;Rs为第s个威胁源的有效威胁范围,且当Di(s)≤Rs时,ks=1,否则ks=0。
如果UAV即时航迹的航迹段数为n,则整条航迹的被摧毁概率为:
(4)
4.2 撞地概率
一般情况下,UAV在进行低空突防时,其突防高度h、地形方差σT和各种高度控制方案误差σh对UAV的撞地概率影响较为明显。因此,UAV低空飞行时的撞地概率为:
P=F(h,σT,σh) (5)
针对不同地形,地形起伏标准差σT如表1所示[5]。

表1 地形起伏标准差Table 1 Topography standard deviation
4.2.1 平原、丘陵、山地区域飞行的撞地概率计算
运用误差综合理论可得,UAV在丘陵和山地区域飞行时与航迹撞地概率有关的高度标准差为:
(6)
式中,丘陵、山地区域飞行一般采用气压测高方式,ΔσH由式(1)计算;平原地区飞行一般采用雷达测高方式,ΔσH由式(2)计算。根据概率论的中心极限定理可知,UAV飞行高度测量控制误差近似服从正态分布,如果忽略系统误差,对散布密度函数进行积分[2],可得撞地概率为:
(7)
式中,h为UAV的飞行高度。
4.2.2 海面飞行的击水概率计算
海浪浪高的标准差σS一般取值见文献[5]。UAV与碰海有关的高度标准差为:
(8)
则对应的击水概率Pw可由式(7)计算。
4.2.3 UAV沿给定航迹飞行的撞地概率
根据UAV飞行航迹段对应的地形特征,计算此航迹段i对应的撞地概率Pci:
(9)
如果UAV即时航迹的航迹段数为n,则整条航迹的撞地概率为:
(10)
4.3 航迹段有用性指标
航迹段j的有用性指标uj是用于衡量UAV在飞行过程中接受到有效的改变攻击目标的信息指令以后,进行攻击目标改变,并在规定的时间内到达指定突现目标的可能性,计算方法为:
(11)
式中,Ejw为从发射点到航迹段j中心点的距离代价;Ejd为从默认目标到航迹段j中心点的距离代价;EL为UAV可用于徘徊飞行的飞行航程部分;Pij为UAV从航迹段j及时到达第i灵活目标并成功攻击的概率,且当tij≤Ta时(Ta为突现目标存在阈值时间;tij为从航迹段j到达第i个灵活目标的预期时间),Pij=1,否则为0;Pai=1/Na(Pai为目标在位置坐标(xai,yai)出现的可能性,Na为灵活目标的数目);A为一较大的正整数。
4.4 航迹数据传输时间
设航迹数据的传输时间为Tc、航迹数据量为Gpath、数据链传输速度为VSTD,则:
Tc=Gpath/VSTD(12)
此外,对于即时航迹评估涉及的其他指标的计算,如航迹长度、水平转弯角、爬升/俯冲角、水平转弯次数、俯冲/爬升次数等可参考文献[3]。
5 UAV即时航迹优劣的变权综合评估
本文采用变权综合评估方法对UAV即时航迹进行评估,其一般过程为:
(1)评价指标的确定及计算
对UAV航迹进行评估主要考虑以下几个指标:被摧毁概率Pd、撞地(击水)概率Pc、航迹数据传输时间Tc、水平转弯次数Ns、爬升/俯冲次数Nv、飞行时间Tf、航迹段有用性指标u,各个指标的计算模型如第4小节所述。
(2)各评价指标的归一化处理
根据各评估指标的特点,可得知Pd,Pc,Tc,Ns,Nv和Tf属于成本型指标,u属于效益型指标。计算目前已经评估过的航迹中各指标的最大/最小值和各指标归一化值,并进行一致性检验,得到各评估指标常权权重。
在UAV即时航迹的评估中,鉴于权值小的指标也能对即时航迹的优劣产生较大的影响,故采用变权综合评估方法对即时航迹的优劣性进行评估。其中指标的变权向量W(u)等于指标常权向量W0与指标值的变权向量Su的Hadamard乘积,具体的计算方法为[6-7]:
(1)确定两两因素的变权比ηij(ui,uj)(i,j=1,2,…,m):
ηij(ui,uj)=wiuj/wjui(13)
(2)确定变权wj(u1,u2,…,um) (j=1,2,…,m):
(14)
计算各评估指标常权和变权权重,其结果如表2所示。
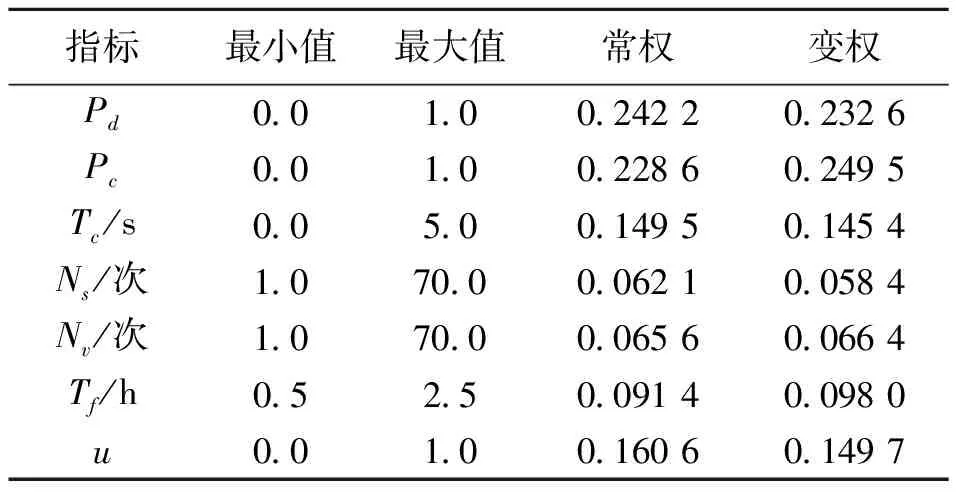
表2 评估指标常权和变权计算结果Table 2 Evaluation indexes of constant/variable weights
(3)基于AHP-Delphi的变权综合评估计算:
通过对各航迹进行飞行模拟仿真并快速计算各评估指标值,利用所建立的基于AHP-Delphi的变权综合评估模型可对多条航迹进行评估,将优劣性进行量化并排队,为决策者选择合适的航迹提供辅助决策信息。
采用上述方法,对表3给定的即时航迹进行评估,结合威胁信息和UAV飞行性能参数,通过编程计算,可得即时航迹优劣判断结果如表4所示。
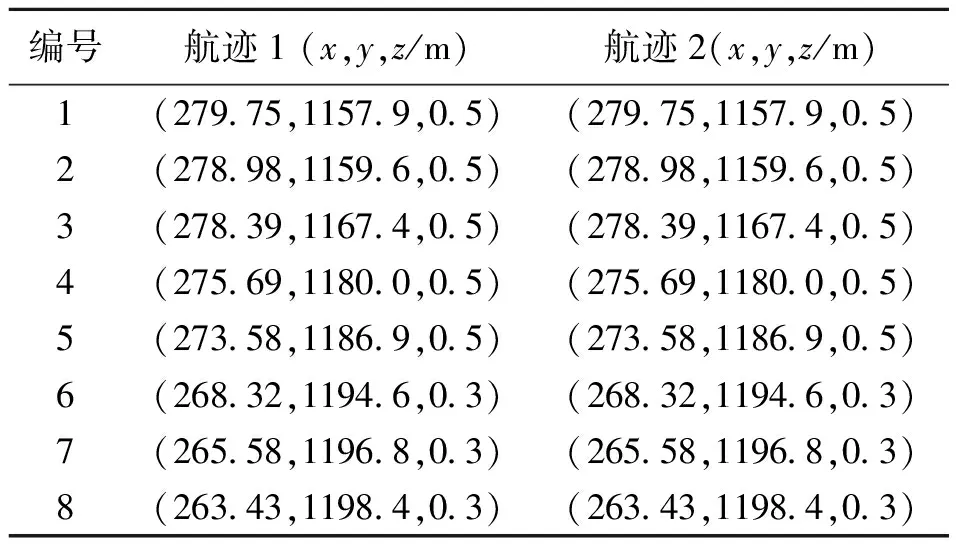
表3 即时航迹数据Table 3 Data for real-time paths
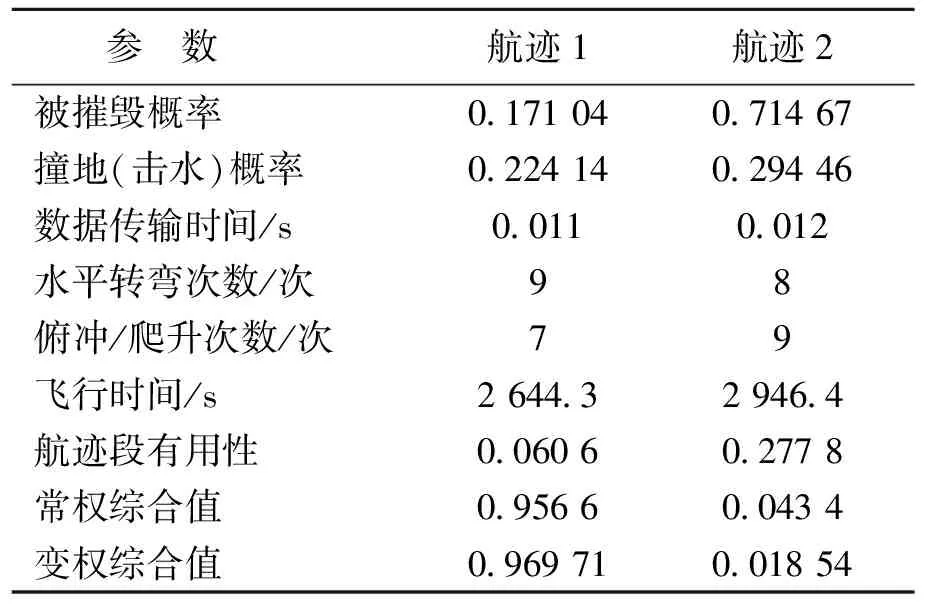
表4 即时航迹优劣判断结果Table 4 Judgment result of real-time path quality
假设选定两个威胁的参数值为:威胁1(26962m,11805m,50m,1050m,10)和威胁2(27531m,11635m,50m,950m,8)。UAV飞行性能可描述为:航迹长度200km,最大水平转弯角10°,最大俯冲/爬升角45°,飞行速度240m/s,最小航迹段长度5km。则即时航迹可行性判断结果为可行。
6 结束语
本文针对UAV即时航迹提出了航迹可行性评估指标和优劣性评估指标,给出了基于综合误差理论的UAV航迹飞行包络确定方法。在此基础上,提出了基于航迹飞行包络的UAV即时航迹评估指标快速计算方法。针对常权评判在UAV即时航迹评估中存在的不足,运用变权综合评估模型实现了对即时航迹优劣的评估,为航迹选择提供了客观合理的量化方法。根据对各项指标的评估结果,指挥人员可综合指标和动态环境,选取恰当的飞行航迹,从而提高UAV的飞行效能。
参考文献:
[1] 史和生,王耀华,赵宗贵,等.能重选目标的低可观测飞行器指挥模型研究[J].弹道学报,2005,17(4):73-77.
[2] 张欧亚.面向Agent的UAV武器控制系统分析与设计[D].西安:西北工业大学,2007.
[3] 王琦.飞行器航迹规划与航迹评价算法研究[D].哈尔滨:哈尔滨工业大学,2007.
[4] 何兵,刘刚,雷刚,等.飞航导弹飞行包络影响因素分析[J].飞行器测控学报,2011,30(2):84-88.
[5] 湛必胜,王明海,李邦杰,等.巡航导弹飞行撞地概率的一种计算方法[J].飞行力学,2006,24(3):78-79.
[6] 李洪兴.因素空间理论与知识表示的数学框架(VIII)——变权综合原理[J].模糊系统与数学,1995,9(3):1-9.
[7] Boussofiane A,Dyson R G,Thanassoulis E.Applied data envelopment analysis [J].European Journal of the Operational Research,2005,52(1):1-15.
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16
青年歌声(2019年12期)2019-12-17
民用飞机设计与研究(2019年4期)2019-05-21
系统管理学报(2018年2期)2018-08-13
北京航空航天大学学报(2017年7期)2017-11-24
重庆文理学院学报(社会科学版)(2017年5期)2017-10-23
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16
西南交通大学学报(2016年3期)2016-06-15
电测与仪表(2016年3期)2016-04-12