面向自动化移栽的新型番茄育苗移栽机械设计
2014-09-13 08:12:02卢华纳斯哈提叶德军咸丽胡斌
机械制造与自动化 2014年5期
卢华纳斯哈提叶德军咸丽胡斌
(新疆昌吉职业技术学院机械工程分院 新疆昌吉831100)
0 引言
番茄是最受欢迎的蔬菜之一,其全球年产量超过1.2亿吨,中国作为第二大产国,其产量已超过3700万吨。目前,番茄育苗技术在新疆生产建设兵团已经大面积推广,而番茄苗移栽仍然依靠人工完成。据统计,一个熟练劳力以每天工作10 h计算,平均只能完成0.1公顷左右的移栽面积[1]。由于番茄移栽正值春播时节,劳动紧张导致了劳动力价格的节节攀升,因此加大番茄移栽机械的研发,将有助于提高番茄生产效率,降低生产成本,也符合“番茄生产全程机械化关键技术与装备”这一当前优先发展的高技术产业化重点领域的发展要求,更重要的是可将新疆红色产业做大做强。
国内外目前番茄移栽机的特点:1)投资成本大,价格昂贵,结构复杂,维修困难。如台湾K C.Yang等研制的移栽机器人,在工作的过程中,依靠系统的视觉传感器和力度传感器,能够做到夹持秧苗而不会对其造成损伤。但设备维修费用高,一般的种农户难以接受。如田耐尔牌秧苗移栽等机。鹏飞牌多功能秧苗移栽机,富来威油菜移栽机,重庆北卡农业科技有限公司生产的番茄移栽机等,这些移栽机所需送苗人力过多,过程复杂。2)要求配套技术条件较高。3)小面积番茄地里不能使用。因此加大自动化番茄移栽机械的研发工作力度,尽早将成熟、适用的番茄移栽机械投放市场,不但可以提高番茄生产效率,而且可以节约成本,提高收入。
本文致力于面向自动化移栽的番茄育苗移栽机械设计,通过关键机构的研究和设计,开发了新型番茄育苗移栽机械,解决了当前依靠大量人力进行番茄育苗移栽低效率的难题。
1 新型番茄移栽机的工作原理和总体设计
1.1 新型番茄移栽机总体设计
番茄移栽机械主要由落苗机构,行走机构,行距调整机构等组成,如图1所示。
其工作原理是来自拖拉机的动力由驱动轮7传动到偏心机构3和长连杆8,长连杆运动过程中带动下顶杆的上移,推开门杆,同时顶开上顶杆,苗盘中的秧苗通过隔板式带式输送装置23将苗由送料轮输送至导苗器,偏心轮机构转过180°后,中门打开,苗落入漏斗中,随着驱动轮的运转实现插苗。
1.2 番茄移栽机械的主要技术参数
1)移栽机配套动力:15 kW以上轮式拖拉机;作业行数/行 :2;
2)栽培模式 :株距:25~40 cm;行距:30~60 cm可调;
3)送苗方式:人工配合机械送苗
4)番茄钵苗的形状 :30 mm×20 mm×40(底部直径×高×度)的锥体
5)作业速度/m/s:0.4~0.6(60~80株/min)
6)机械栽苗率:≧90%技术指标;
7)质量:900 kg以下。
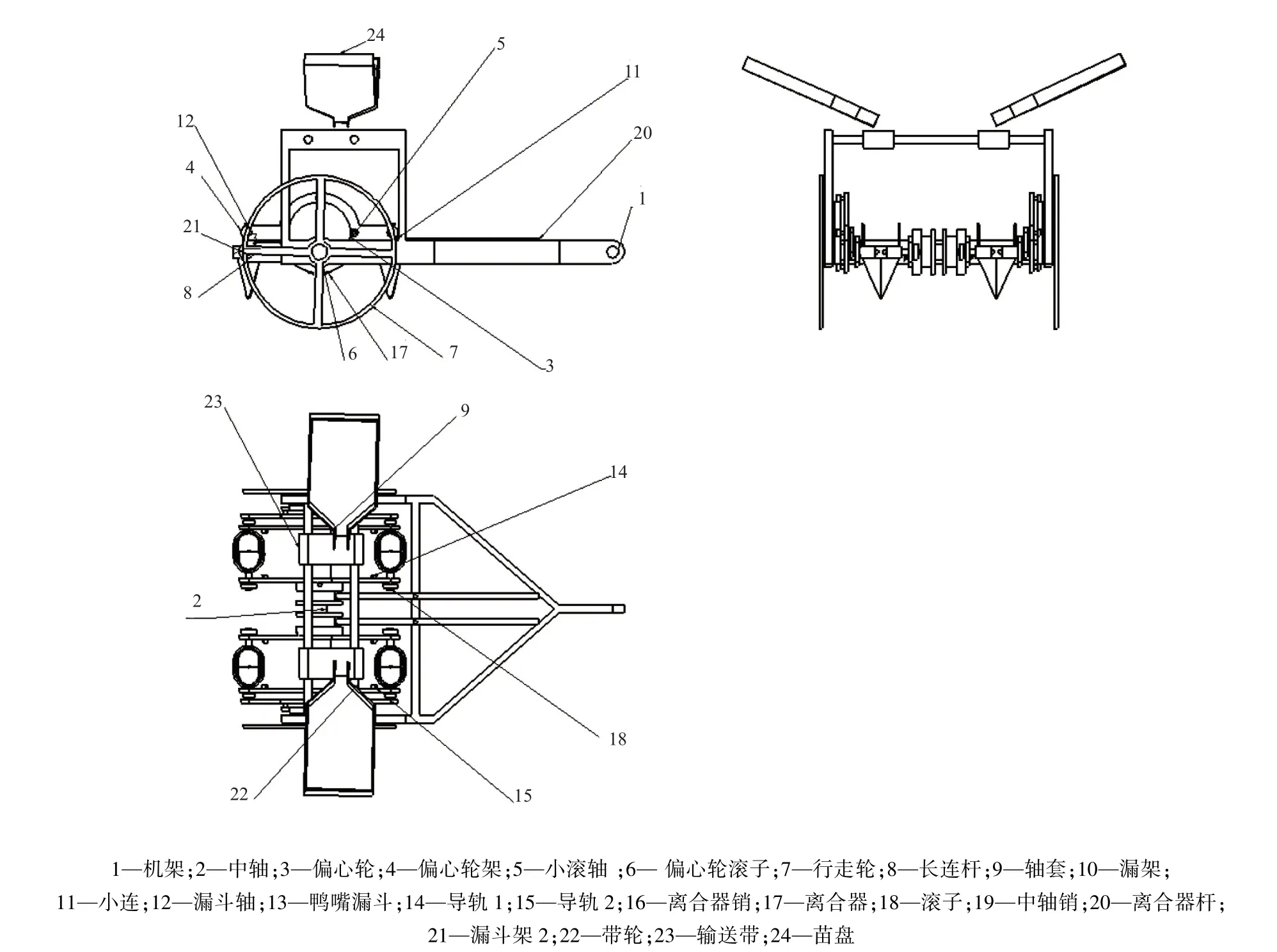
图1 番茄移栽机械结构图
2 新型番茄移栽机械的关键机构设计
2.1 番茄落苗机构设计
2.1.1 番茄苗的特点
新疆的番茄主要采用育苗移栽,番茄育苗的底部的形状为30 mm×20 mm×40 mm的锥体,苗的高度一般在15~20 cm之间。由于育苗移栽前施水后存在一些尺寸变异,育苗底部一般在2 mm尺寸范围内。[2]
2.1.2 番茄苗运动轨迹
为了节省人力,使番茄顺利落苗,不会伤苗且不影响苗移栽的直立度。要求具体轨迹和姿态应该是:1)使苗按一定的轨迹运动,苗在略带斜度的苗架上借助重力能顺利到达送苗输送带,2)苗沿着轨迹运动时,对应落苗、送苗、接苗、植苗位置应有不同的姿态,送苗与接苗夹角为90°,投苗时接苗器与植苗器轴线的夹角为 0°左右,苗在离开导苗管时不受阻力,植苗器轴线应垂直地面,以保证接苗顺利和植苗准确;3)植苗器在接苗点处和植苗点处的速度为0。
2.1.3 番茄落苗机构的设计
a)输送苗、落苗机构的落苗过程
番茄苗的落苗过程可分为4个阶段:1)番茄苗由苗盘取出落入输送器,输送器借助拖拉机的动力驱动,将番茄苗逐一输送到送料轮盘,苗做匀速运动 。2)苗由拔苗盘送至导苗管口,苗做平面运动,此时为转动。3)苗在导苗管内视为质点的重力加速直线运动,忽略叶片与管内表面的摩擦[3]。4)从整个苗移出导苗管口到苗钵接触地面,假设苗钵与地面是塑性碰撞,碰撞后苗钵的运动简化为定点的运动,到被覆土定位。
b)输送苗、落苗机构的结构
番茄送苗机构主要采用输送带结构,主要由隔板、输送带、带轮构成。如图2所示。
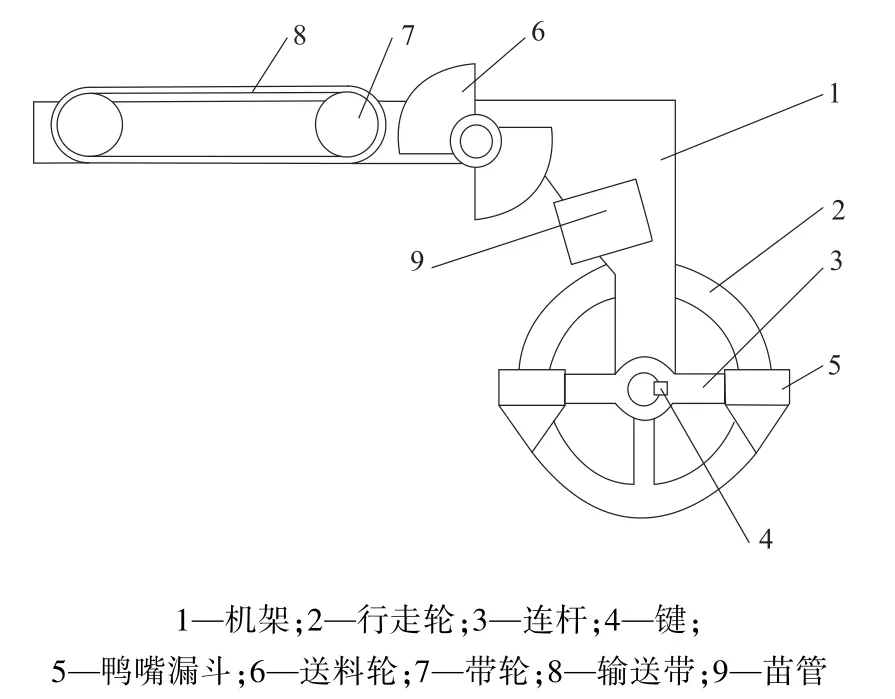
图2 番茄移栽机械输送苗、落苗机构图
c)输送苗、落苗机构的原理
秧苗通过隔板带式输送装置将苗输送至送料轮,苗随着送料轮的转动被运送到接苗管;在重力加速度作用下,苗直线运动被送到喂苗机构。喂苗机构主要有连杆、鸭嘴漏斗等组成。工作时,苗落入送料轮中,随着移栽单体的转动放在接苗管中的苗落下,落入栽植单体的鸭嘴漏斗中,完成了喂苗工作。苗移出喂苗口到接触地面,到被覆土定位。
2.2 番茄移栽机移栽行距调整方式
2.2.1 番茄移栽行距特点
按照番茄农艺技术的要求制定移栽行距调整的方案,确定最佳的调整方案。
2.2.2 番茄移栽机移栽行距调整方式
考虑确保投苗准确性,该机采取离合器实现苗株数的调整,且机架的相对位置可调,通过调整机架的相对位置,可实现30~60 cm行距。其功能调整简单、易操作。据此基于Solidworks设计的番茄移栽机械的行距调整结构图如图3所示。
3 番茄移栽机械的关键机构的运动仿真
3.1 移栽机虚拟样机的建立
运动仿真是一种简单的运动模拟,是在Solidworks平台上建立已设计好的番茄移栽机械模型。运动仿真是将对机构的运动无影响和不起作用的零件都做简化处理,只将最主要的零部件装配在一起,在不影响运动情形的前提下对零部件的结构进行必要的优化[4]。基于这样的思路,建立番茄移栽机的仿真模型前,需先将机架、轮子、连杆、漏斗、送料轮、输送带、苗盘等结构和运动主要零部件装配成一个简化的装配体模型。番茄移栽机械装配体模型如图3所示。

图3 番茄移栽机械装配体模型图
3.2 基于 Solidworks的番茄移栽机械运动仿真分析
3.2.1 设定番茄移栽机械运动仿真参数
在Solidworks环境下,结合实际工况和技术要求对番茄移栽机械的运动参数进行设定,设定旋转马达代表番茄移栽机械的运动,选择长轴为动力源。然后确定运动参数,根据实际工况和技术图样确定竖直方向位移为300 mm,时间初步设定为5 s,所以运动的马达类型为[等速],转速为 100 r/min。
马达的运动参数设定完后,确定各个马达相应的时间起止点[5],完成后的运动仿真模型和MotionManager界面如图4所示。
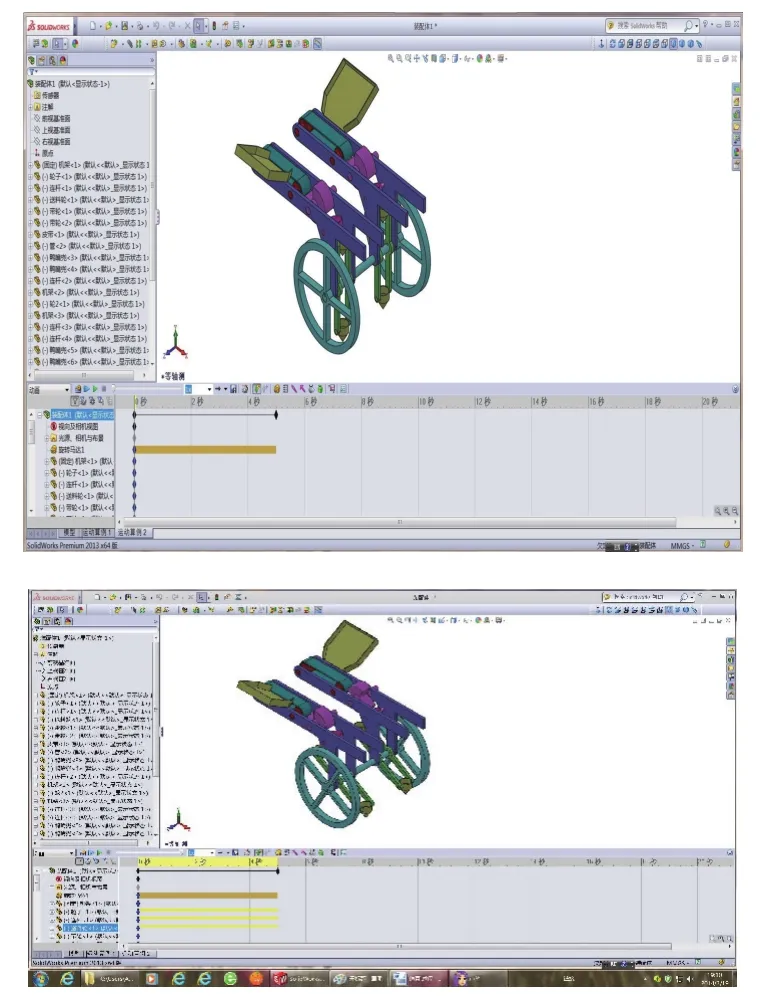
图4 设定好运动参数的运动仿真模型
3.2.2 动画仿真番茄移栽机械运动过程
在MotionManager界面中将仿真类型选为[动画],对番茄移栽机的运动过程进行仿真和再现。运动仿真后进行干涉检查,发现零部件之间不存在干涉,动作完成以后单击[保存动画]将仿真动画保存为AVI或其他文件类型,如图5所示。图5(a)中番茄苗经过倾斜板在重力作用下落入输送带,秧苗通过隔板式带式输送装置能将苗正确地输送至送料轮,图5(b)苗随着送料轮转过180°,后接苗管能完好的接到苗;图5(c)连杆在转动过程中送料轮已接到苗准备下落,图5(d)落入栽植单体的鸭嘴漏斗中的苗接触地面,到被覆土定位。另一个鸭嘴漏斗已接到第二颗苗,在往复过程中完成了移栽。

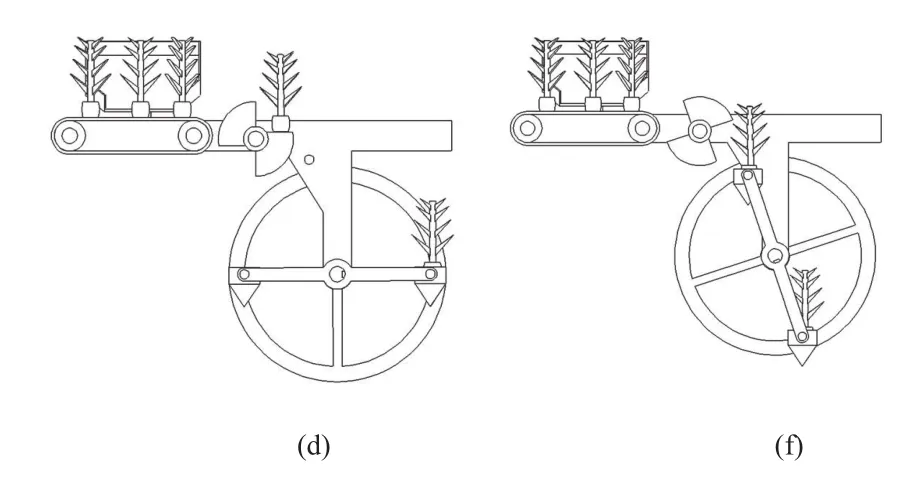
图5 番茄移栽机械运动仿真图
由仿真结果可知,输送带、送料轮、导苗管、漏斗的运动保证移栽机能够顺利地取苗和投苗,当前进速度与主轴转速数值比一定时,株距值始终保持不变,只要保持前进速度与转速的比值不变,则取苗轨迹和植苗轨迹都不会受影响。
4 结语
针对现有番茄移栽机械自动化程度不高的现状,本文设计了基于新型机构的自动化番茄育苗移栽机械,重点研究了送苗、落苗机构和行距调整机构的设计,在此基础上,进行了新型番茄育苗移栽机械关键机构的运动过程仿真和分析。研究结果表明:仿真所得的轨迹能够很好地满足移栽机的高效自动化移栽要求。
[1]杨二军.新疆番茄酱出口市场潜力研究[D].乌鲁木齐:新疆农业大学,2013.
[2]倪向东,等.导管式番茄移栽机的设计[J].农机化研究2011,2:85-86.
[3]丁文芹,等.穴盘苗自动移栽机的结构设计及运动仿真分析[J].农机化研究,2011(10):74-75.
[3]高国华,等.自动化穴苗移栽机关键机构的模块化设计[J].机电工程, 2012,29(8):883-885.
[4]鲁恒飞.基于Solidworks的悬挂式轮毂轴承压装机设计与优化[D].合肥:合肥工业大学,2012.
[5]Gianluca Caruso,Stefano Conti,Effects of transplanting time and plant density on yield,quality and antioxidant content of onion(Allium cepa L.)in southern Italy,Elsevier期刊 Scientia Horticulturae,2013:19.
猜你喜欢
建筑与预算(2024年1期)2024-03-01 09:23:10
建筑与预算(2023年12期)2024-01-18 06:46:08
建筑与预算(2023年10期)2023-11-20 08:42:16
新农民(2021年15期)2021-09-16 09:47:57
现代农村科技(2019年3期)2019-01-06 15:12:51
西藏农业科技(2018年4期)2018-04-25 06:39:26
设备管理与维修(2016年5期)2016-03-16 02:20:53
橡胶工业(2015年10期)2015-08-01 09:06:02
安徽农业科学(2015年33期)2015-03-19 06:44:16
电视技术(2014年7期)2014-03-11 15:36:57