
双工位胶带疲劳试验机自动控制系统研究
2014-09-13 08:12周海涛周建华杭小宇
机械制造与自动化 2014年5期
周海涛周建华杭小宇
(扬州大学机械工程学院,江苏扬州225127)
0 前言
试验机作为一种用于研究及检测材料、零部件、各类产品力学性能和可靠性的测试仪器,广泛用于科学研究、能源交通和机械电子等领域,是科研和生产部门必需的基本设备。试验机在新型材料开发、材料试验、产品品质监督、产品设计、以及品质控制等方面都有着重要的作用。随着现代科学技术的发展,人们愈加重视动态试验,疲劳试验机整体水平都在不断提高,它己成为汽车、飞机等机械制造行业零件疲劳强度以及寿命试验不可缺少的设备。
疲劳试验机作为技术密集型测试装置,它涉及到机械、电子、液压、测量、材料、自动控制等众多技术领域;同时还综合了现代闭环伺服、机电一体化、数字显示、以及电子计算机等技术,被广泛应用在新材料开发,结构设计和机械、航空、船舶、航天、人体力学性能研究等领域。
1 胶带疲劳试验机
胶带疲劳试验机主要用来测试在室温状况下的非金属材料在一定载荷条件下发生变形时的应力和应变的变化情况。因此可以通过对胶带疲劳材料试验机的控制系统进行重新设计,实现实验数据的实时自动采集、分析、处理和对执行机构的自动控制,来提高胶带疲劳试验机的性能和自动化的程度。
采用电液伺服阀来实现疲劳试验机运行控制,使胶带疲劳试验机提高试验精度与扩充了动态试验负荷种类。目前,电液型伺服疲劳试验机根据科技进步和被试验对象的需要,正向着全微机化、节能化、智能化方向发展,以进一步提高试验机效率,提高试验机的降低能耗和精度。
2 胶带疲劳试验机系统设计
2.1 总体结构组成
胶带疲劳试验机的系统由主机系统、电控系统和液压系统组成。其中电控单元是试验机控制系统的核心,对胶带疲劳试验机工作状态信号进行采集并对其工作过程进行控制,主要包括液压系统控制单元、信号测量单元、控制单元三部分;机械本体主要包括横梁、底座、上下夹持器以及液压传动装置等,其结构如图1所示。试验时对安装在上下夹头上的试样加载,同时由信号测量单元测量试样的受力和胶带试验机下夹头的位移量,并通过相关装置将上述信号送入控制单元,控制单元根据不同的控制要求,选择力和位移中的一个作为控制系统的反馈信号,并将它与给定值进行比较;并输出控制信号。
2.2 液压系统
对于液压系统由电液伺服阀、油泵、溢流阀、伺服油缸、压力表和单向阀组成等。液压系统的原理如图2。
从油压源输出的油液由过滤器进入电液伺服阀,同时电子控制系统将给定电信号与来自负载位移传感器的输出反馈信号进行对比,并将其差值放大后送至电液伺服阀,将电信号转变为油液流量,高压油交替输送到伺服液压缸上下油腔,活塞驱动胶带疲劳试验机横梁上下运动,进行胶带疲劳试验。此过程不断循环往复,使反馈信号与给定值之间的差值不断减小,即控制试验机按照既定的运动规律运动。
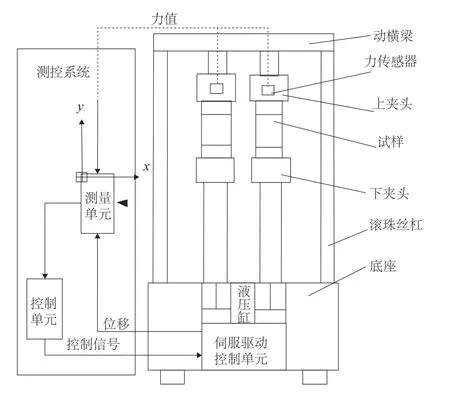
图1 胶带疲劳试验结构组成
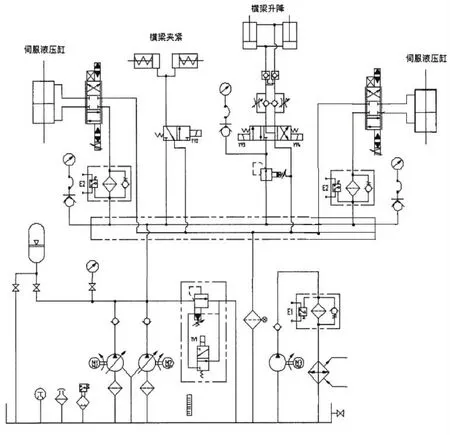
图2 液压系统原理图
阀控液压缸控制系统结构如图3,系统根据被控参量的控制要求,微机控制系统给出适当形式的电信号,驱动电液伺服阀工作,来控制高压油的流量,从而推动液压执行元件加载胶带。
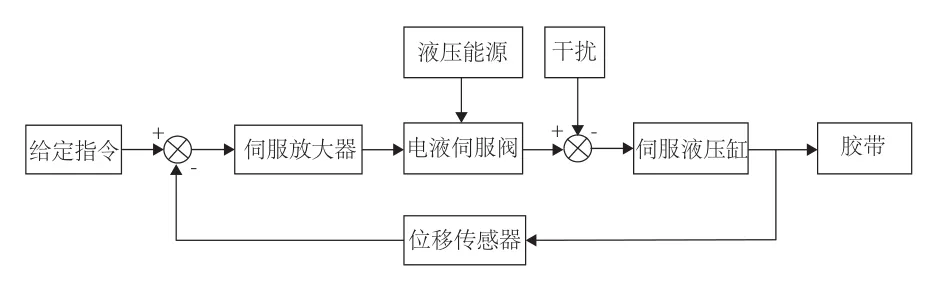
图3 阀控液压缸控制原理
2.3 胶带试验机控制系统的总体设计
控制系统的总体结构如图4,首先由测控软件输出控制信号,通过液压单元驱动试验机运动,安装在试验机上的信号测量装置和计算机上的信号采集卡将试验机上的位移、变形和载荷信号反馈到上位机,并将其与初始控制信号值对比,上位机通过控制模块对差值进行处理,并由控制卡发出控制信号控制试验机,循环不断往复,直到达到预定的控制效果。
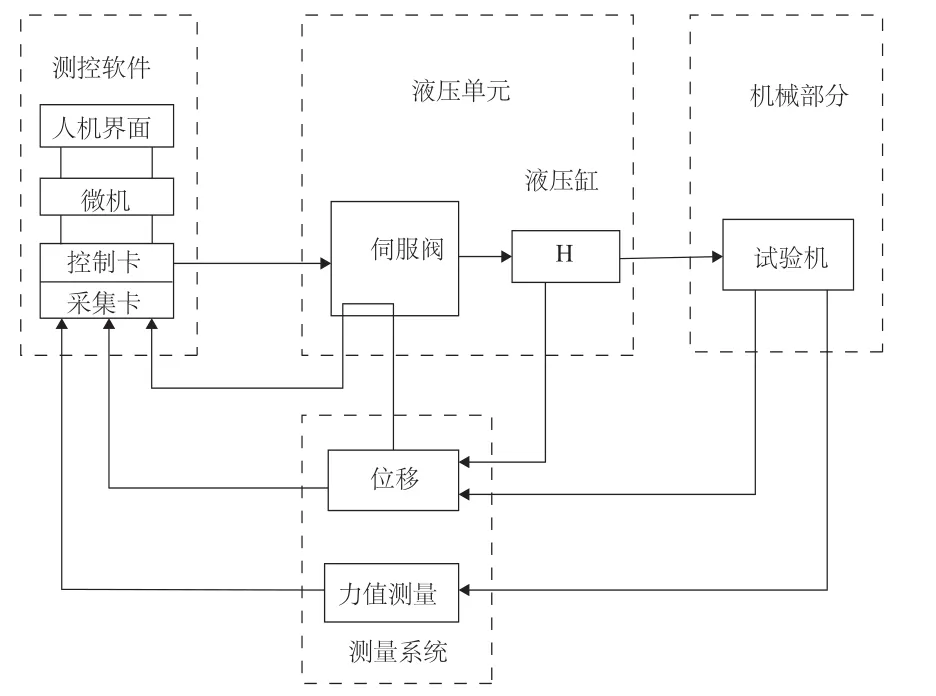
图4 胶带疲劳试验机结构示意图
系统中有着两路信号的采集和一路信号的输出;信号采集的速度和精度对试验机的性能具有重要影响,系统中信号的采集和控制是通过控制卡实现。
3 液压系统建模
3.1 电液伺服阀的模型
电液伺服阀不仅是电液转换元件,而且也作为功率放大元件。它能够将输入的微小的电气信号转换成大功率的液压信号输出。
对于绝大多数电液伺服系统,伺服阀动态响应通常高于负载动态响应。当伺服阀频宽和液压固有的频率相近时,伺服阀可近似地看成二阶振荡环节,其伺服阀传递函数为:

式中:Qo—伺服阀的空载流量;
Wsv—伺服阀固有频率;
Ksv—伺服阀的流量增益。
3.2 伺服放大器的模型
伺服放大器作为伺服系统控制的重要组成部分,它必须和伺服阀机电转换器匹配,便可以改善系统稳态特性。伺服放大器起到的是功率放大作用,这样输入的电压信号转换成电流信号,并将其进行放大来驱动阀芯移动。其数学模型为:
式中:I(s)—伺服放大器的输出电流;
Ka—伺服放大器的放大系数;
U(s)—伺服放大器的输入电压。
3.3 系统的模型
通过各个环节确定的传递函数,画出电液位置伺服控制的方块图,如图5。

图5 电液伺服控制系统方块图
系统开环传递函数

4 自适应模糊PID控制
PID控制利用模糊控制器将经验知识以控制规的形式表达,自动进行模糊推理以及自动对PID参数实现最佳整定。
自适应模糊控制器输入误差e与误差变化ec,可满足不同时刻e和ec对PID参数自我整定的要求。其结构如图6所示。

图6 自适应模糊PID控制器结构
通过找出PID三个参数Kp、Ki、Kd与e和ec之间模糊关系来行进PID参数模糊自我整定,当运行时通过不断的检测e和ec,根据模糊控制原理实行3个参数在线进行修改,以达到控制参数不同的要求;同时PID参数整定必须考虑在不同的时刻三个参数的作用和它们之间的互联关系。自适应模糊PID是在PID算法的基础上,通过计算当前的系统误差e与误差变化ec,再利用模糊规则进行模糊推理,查询模糊控制表实行参数调整。
模糊推理器的隶属度函数设E为输入误差e的语言变量,EC为误差变化率ec的语言变量。KP为比例系数Kp的语言变量,KI为积分系数Ki的语言变量,KD为微分系数Kd的语言变量。如图7,图8所示。
PID算法三个参数会影响系统的响应速度、稳定性、超调量与稳态精度。在系统运行时对不同的误差e及误差变化率ec,参数KP,KI,KD自适应调整规则是:
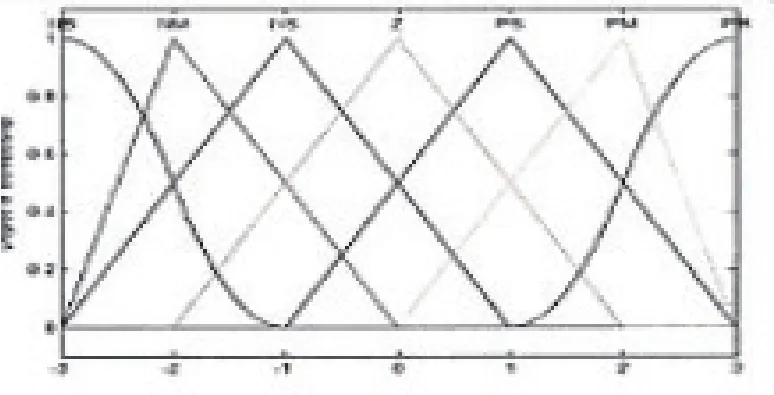
图7 误差e及变化率ec隶属度函数
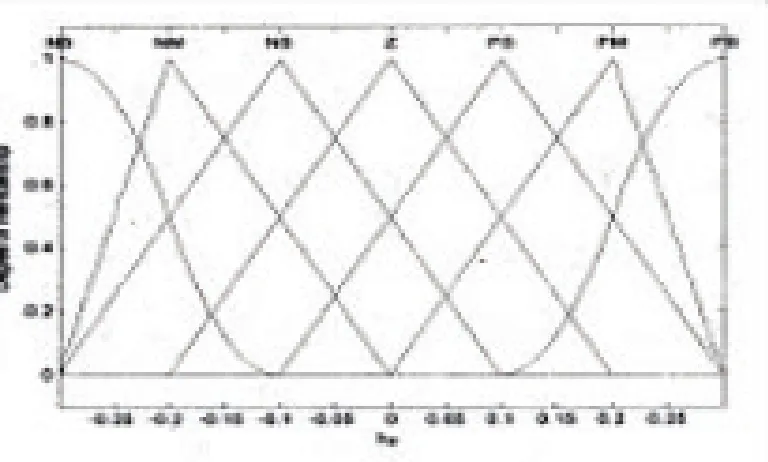
图8 Kp隶属度函数
1)如果误差e较大情况时,应取较大的KP和较小的KD,KI一般设定为0;
2)如果误差e与误差变化率ec为中等情况时,KP和KD的取值应较小,而KI一般设定成中等大小;根据其作用原理和操作经验,设定模糊整定控制规则见表1。
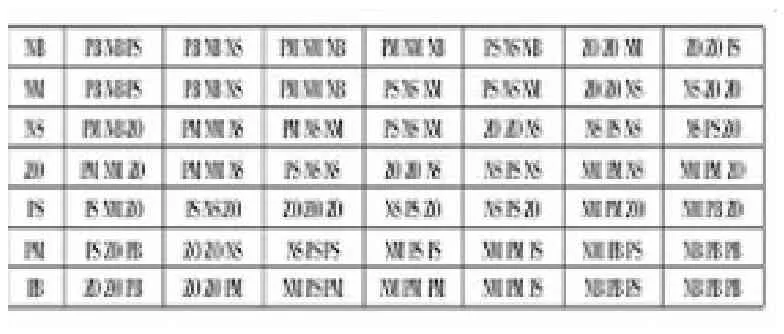
表1 模糊整定规则法
其模糊子集为e,ec={NM,NB,PS,NS,Z,,PB,PM}。设定e,ec与KP,KI,KD均服从正态分布,得出各模糊子集隶属度,根据各个模糊子集的隶属度赋值表及各参数控制模型,查出修正参数代入对应算式计算。
系统在线运行过程时,完成对PID参数在线自动校正。模糊PID控制系统SIMULINK模型如图9所示。
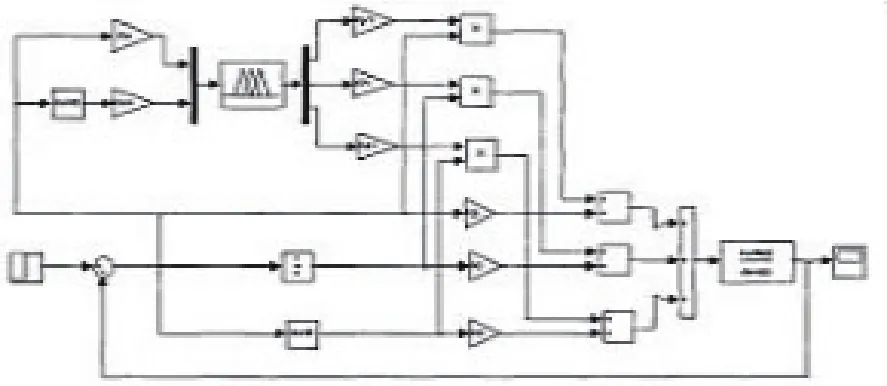
图9 自适应模糊PID控制系统SIMULINK模型
PID控制系统响应曲线如图10所示。图中可以看出,自适应模糊PID的自适应较强,整个控制系统基本没有静差和超调,大大改善系统的静、动态性能。
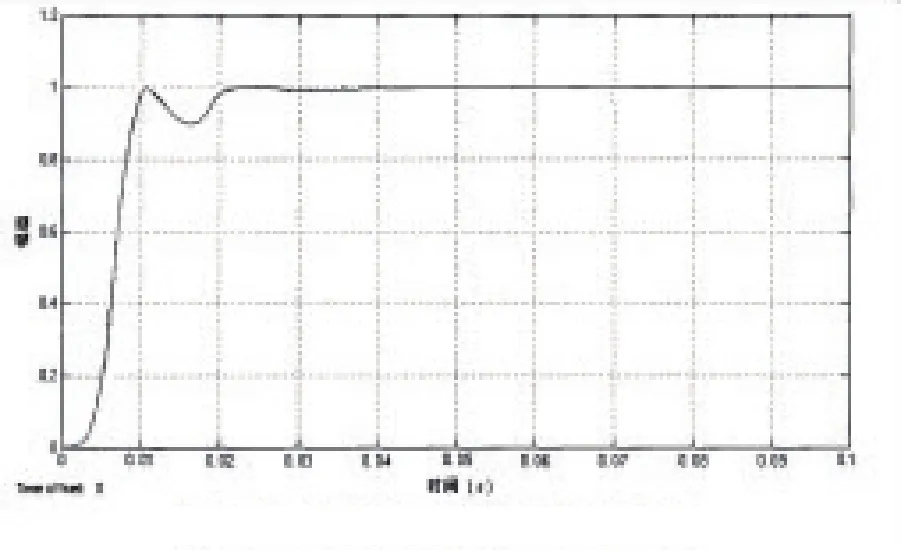
图10 自适应模糊PID控制系统阶跃响应曲线
5 结语
本文利用模糊PID控制系统的SIMULINK模型进行试验,结果表明模糊自我整定算法能够很好的发挥传统算法与模糊控制的优点。在系统参数发生变化时,其具有很好的自整定能力,相对于传统的PID在响应时间、超调量等方面有明显改善,这在实际的过程控制中具有参考价值。
[1]刘金馄.智能控制[M].北京:电子工业出版社,2009.
[2]陶永华,尹怡欣,葛芦生.新型 PID控制及其应用[M].北京:机械工业出版社,1998.
[3]J.J.Hopfield,D.W.Tand.Neural computation of decision in optimization problems[J].Biological Cybernetics,1985.
[4]刘金馄.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[5]薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2006.
[6]廉小亲.模糊控制技术[M].北京:中国电力出版社,2003.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
哈尔滨轴承(2020年2期)2020-11-06
哈尔滨轴承(2020年1期)2020-11-03
学苑创造·B版(2019年8期)2019-08-09
童话世界(2018年20期)2018-08-06
文体用品与科技(2016年7期)2016-06-15
专用汽车(2016年4期)2016-03-01
橡塑技术与装备(2015年7期)2015-07-03
