传感器阵列六自由度振动测试数值积分误差消除方法研究
2014-09-08 03:31:08陈海龙
振动与冲击 2014年16期
陈海龙,汪 伟
(军械工程学院 一系,石家庄 050003)
振动测试对产品的可靠性、工作环境及机械故障诊断等均具重要参考意义,车辆、舰船、飞机等运动体的振动状态测试备受关注。但测量任意振动下六自由度运动参数时绝对式位移传感器存在体积大、质量大、安装困难、动态范围小等缺陷难以实际应用。普通单自由度多点测量存在安装繁琐、布线复杂、多传感器间相对位置测量及同步测试困难等问题[1]。借鉴无陀螺捷联惯性导航技术,将传感器阵列测试技术用于振动环境可有效对高频率多自由度线振动与角振动耦合效果进行绝对测量,且成本低、反应快、可靠性高等在工程上发展前景广阔[2]。振动信号处理时,为获得振动速度、位移信号需对加速度信号积分,而数值积分存在积分误差随时间增长迅速增大问题。减小数值积分中积分误差途径有两种,即提高传感器精度、改进数值积分算法及分离积分信号中积分误差。分离误差方法常用有最小二乘回归法、傅里叶级数逼近法、小波及小波包分解法等;但均存在模型阶数、基函数不易选取或误差分离精度难提高等问题。为此,本文分析积分误差来源,提出基于经验模态分解(EMD)的误差分离方法消除积分误差。该方法为自适应分解,无需选定模型阶数、基函数,且信噪比较高[3]。
1 三轴加速度传感器阵列方案
1.1 阵列构型
本文所用四个三轴加速度传感器组成阵列方案[4]见图1。建立载体坐标系O-XbYbZb,安装四个三轴加速度传感器时分别使传感器一个敏感轴重合于坐标轴,另两轴垂直于该坐标轴。传感器A1,A2,A3,A4安装位置至坐标系原点O的距离分别为L1,L2,L3,L4。
1.2 振动参数求解
设A为加速度传感器12个敏感轴所测加速度信号,R为载体坐标系3坐标轴方向线加速度,ω为绕载体坐标系3坐标轴角速度,θ为传感器敏感方向;L1=L2=L3=L4=l,由运动学知,任意加速度计输出为
(1)

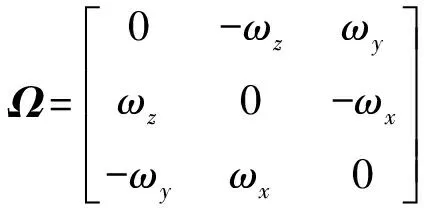

图1 三轴加速度传感器阵列方案
表1为传感器安装位置及传感器敏感方向。
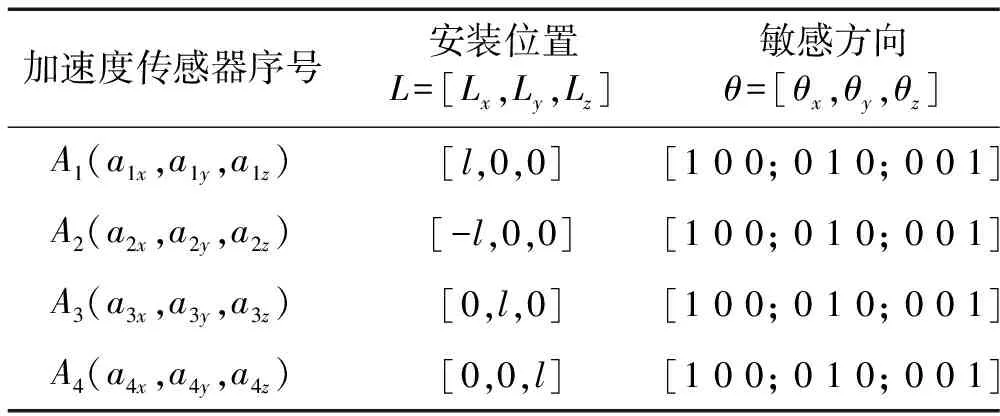
表1 加速度计安装位置及方向
运动载体六自由度运动参数可由绕载体坐标系3坐标轴转动及沿3轴方向平动描述。将L,θ代入式(1)并完全展开可得关于载体坐标系角速度、角加速度及线加速度等变量与12个传感器敏感方向输出加速度关系。
线加速度项为
(3)
式中:gx,gy,gz为3轴加速度传感器3方向所受重力加速度。
角加速度项为
(4)
角速度平方项为
(5)
角速度乘积项为
(6)
由式(3)看出,据加速度传感器加速度输出可得传感器阵列绕载体坐标系角加速度项、线加速度项;由角加速度积分所得角速度代入姿态更新方程可得传感器任意时刻姿态。再由姿态信息及线加速度计算获得位置信息,进而获得每时刻阵列位置及姿态信息,即可获得被测物振动信息。计算流程见图2。
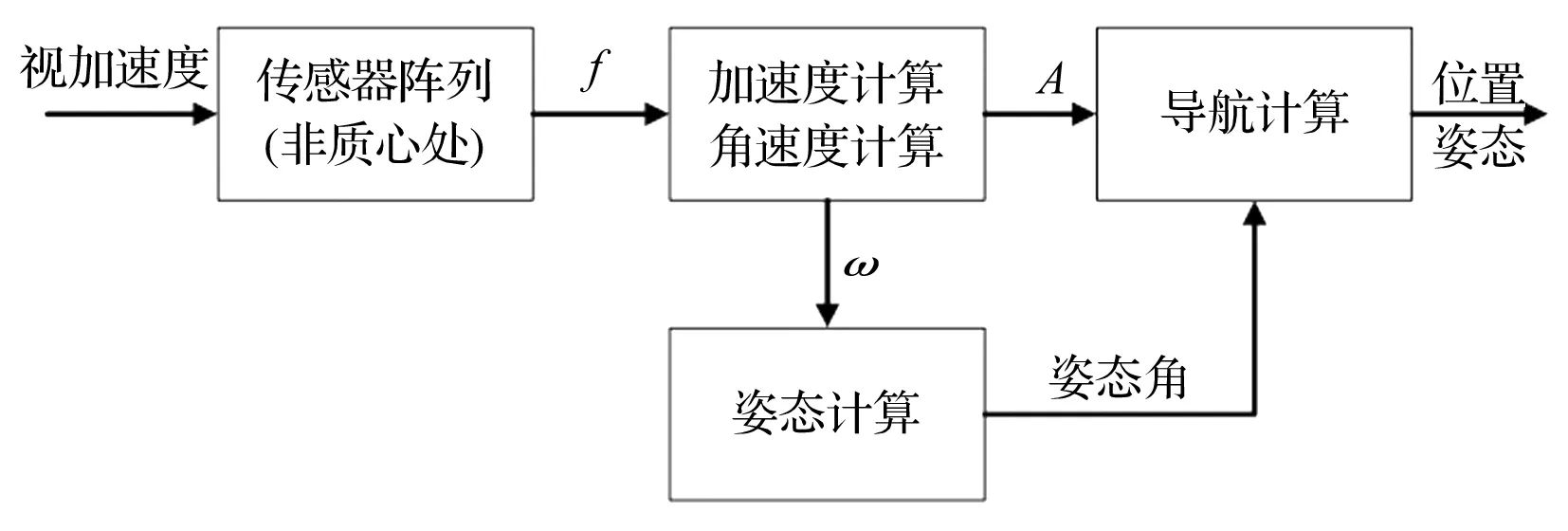
图2 载体位置姿态计算流程
2 数值积分分析及EMD积分误差分离方法
2.1 数值积分分析
振动测试中所得加速度为按采样间隔Δt的一组离散值,(a(n-1),a(n))之间加速度值无法获知。工程中一般采用平均加速度法,即取两点间速度平均值作为t时刻加速度值,称梯形加速度积分法。将时间函数f(t)作泰勒级数展开时f(k)(t)为k阶微分系数,即
(8)
将速度v(t)按泰勒级数展开为
v(n)=v(n-1)+(Δt)a(n-1)+
(9)
(n-1)Δt~(n)Δt时刻加速度为
(10)
四阶以上微分系数为0,代入式(9)得速度积分式为
(11)
同样积分方法得位移积分式为
(12)
用加速度传感器所得加速度信号ac包含加速度真值az(n)及测试误差值aw(n),即
ac(n)=az(n)+aw(n)
(13)
数值积分所得速度信号vc(n)可写为
vc(n)=vz(n)+vw(n)
(14)
式中:vz(n)为速度真值;vw(n)为误差值。
将式(13)、(14)代入式(11)得:
(15)
由式(12)看出,(n-1)Δt时刻积分速度计算误差会带入下一时刻积分速度中不断累积增大。
2.2 数值积分所致误差分析
测试加速度及解算所得角加速度信息中一般含随机噪声及仪器本身漂移误差。零均值随机噪声对积分结果影响较小,信号中含常值偏移量,即
∫(a+C1)dt=v+C1t+C2
(16)
∫(v+C1t+C2)dt=S+C1at2+C2t+C3
(17)
式中:C1t+C2为速度曲线中引入的斜直线误差信号;C1at2+C2t+C3为位移曲线中引入的二次曲线误差信号。
2.3 经验模态分解
作为信号处理的经验模态分解(Empirical Mode Decomposition,EMD)方法由黄锷博士提出,为据数据自身时间尺度特征进行信号分解,无须预先设定任何基函数。此与建立在先验性谐波基函数及小波基函数的傅里叶分解与小波分解具有本质差别。EMD方法理论上可用于任何类型信号分解[5]。由经验模态分解的固有模态分量(IMF)满足的约束条件为:① 整个数据序列中极值点数量与过零点数量相等或至多相差1个;② 信号上任一点由局部极大值点确定的包络线及由局部极小值点确定的包络线均值为0,即信号关于时间轴局部对称。
利用两连续处理结果间标准差SD判断②是否满足,SD值取0.2~0.3为宜,既可保证IMF线性及稳定性,亦可使IMF具有相应的物理意义[6]。分解流程见图3。
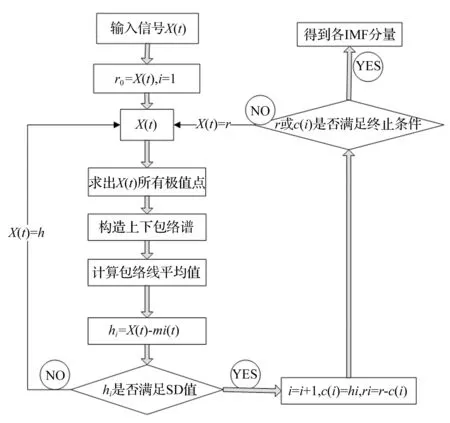
图3 EMD分解流程
2.4 积分误差分离

a(t)=Aejωt
(18)
式中:a(t)为加速度信号在频率ω的傅里叶分量;A为对应a(t)的系数。
初速度、初位移分量均为0时,对加速度分量分别进行一、二次积分,得速度、位移信号分量为
(19)
式中:v(t),y(t)为速度、位移信号在频率ω的傅里叶分量。
式(19)表明,积分所得速度、位移信号频率成分与加速度信号频率成分一致。振动信号加速度频率成分决定振动速度、位移信号频率。因经积分的加速度信号混入低频误差信号,通过对积分的速度、位移数据进行EMD分解获得各频率段IMF分量,并对其进行频谱分析,判断IMF分量是否为误差信号分量,并分离积分误差信号。
3 仿真分析
仿真信号采样频率1 Hz,采集时间10 s,加速度信号由10 Hz,17 Hz正弦信号叠加,并含有0.005 g的常值漂移量及均方差0.001的随机误差。仿真加速度信号及积分所得速度、位移曲线见图4。由图4看出,在含有较小常值漂移情况下随时间增大积分误差迅速增大,严重偏离实际结果。
对积分速度信号进行EMD分解后所得IMF分量及残余量res见图5。

图4 加速度、速度、位移曲线
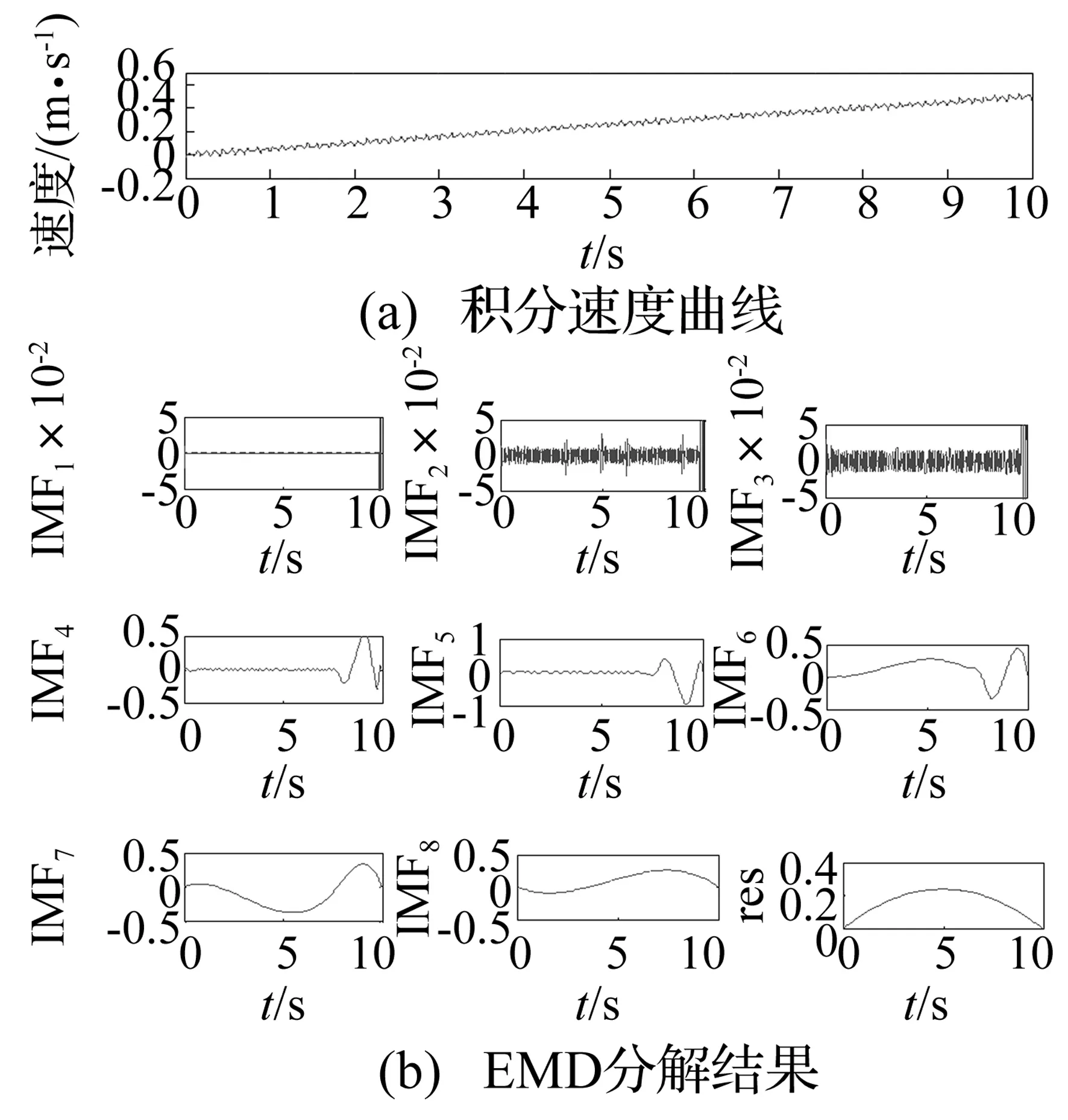
图5 积分速度及其EMD分解结果
对加速度信号及积分速度EMD分解所得IMF分量做频谱分析,见图6。

图6 积分速度及IMF分量频谱
IMF2,IMF3的主要频率成分与加速度频率成分一致,将除IMF2,IMF3以外的IMF分量作为速度积分误差及分离混入的高频随机误差,分离结果见图7。分离积分误差后的速度误差除端点外均在10-4数量级,满足精度要求。
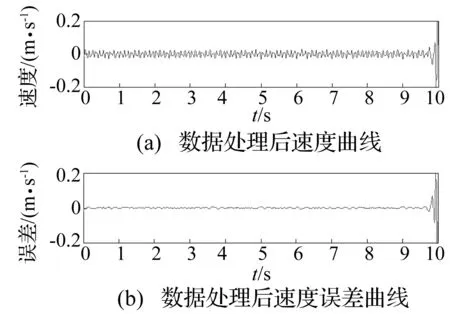
图7 处理后速度及其误差曲线
4 实验分析
将传感器阵列水平置于线振动台上进行试验,安装位置见图8。信号采集频率1 kHz,采集时间20 s,振动台角振动幅值1 cm,振动频率0~25 Hz。

图8 传感器阵列实验图片及安装示意图
图9为传感器阵列测试的加速度、积分速度及位移曲线。由图9看出,积分速度、位移曲线误差增大较快,严重偏离实际结果。

图9 测试加速度、速度、位移曲线
对积分速度进行EMD分解,获得9个IMF分量。进行EMD分解时,为克服EMD端点效应所致两端误差较大影响,可对速度数据进行镜像延拓[8]处理。分别对加速度信号及9个IMF分量作频谱分析,频谱见图10。由图10看出,加速度信号主要频率集中在5~23 Hz,IMF分量频谱主要频率成分逐渐变小。
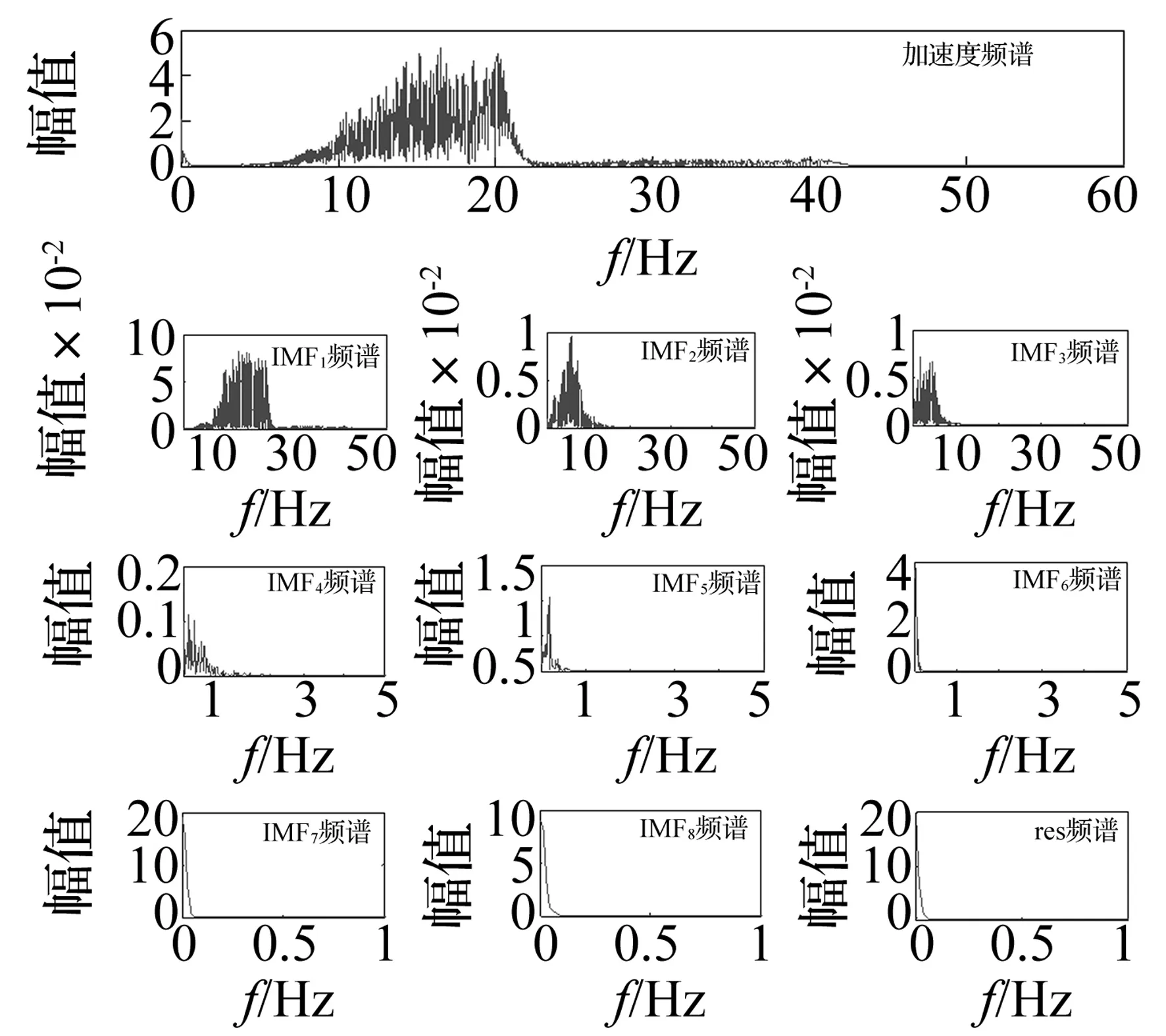
图10 加速度及IMF分量频谱图
将相关系数较小、不在加速度主要频率范围内的IMF4~IMF8及残余量res作为新引入的积分误差,信号分离后所得速度、位移曲线见图11,利用EMD分解后分离低频率段的IMF分量后可得真实的速度、位移曲线。由图11看出,经积分误差分离后所得中心点线振动速度曲线符合实际振动情况。若已知被测物振动频率范围,可将EMD分解所得高于测试频率范围的IMF分量作为高频误差信号分离。因此将EMD分离积分误差方法用于传感器阵列测试可有效提高传感器阵列测试精度,解决传感器阵列长时间测试精度无法保证问题。

图11 EMD分离积分误差后速度、位移曲线
5 结 论
(1) 传感器阵列技术较适合多维线振动、角振动同时存在的复杂振动进行测试。利用4个三轴加速度传感器组成的传感器阵列可减少安装误差及难度。基于EMD理论提出的数据处理方法通过理论分析与实例仿真均表明可解决因积分产生的误差累积问题。
(2) 本文所提基于EMD分离积分误差的传感器阵列振动位移测试可完成一定复杂振动测试。所提数据处理方法对测试对象在原点往复振动效果较理想,对移动目标位移及姿态的测试情况,如何判别分离实际有效运动与积分误差尚需研究。
[1] 陈彦辉,郭旻,何宗颖,等. 炮口振动测试方法及实践[J].火炮发射与控制学报,2010(1):80-83.
CHEN Yan-hui, GUO Min, HE Zong-ying, et al. Muzzle vibration test method and practice[J]. Gun Launch & Control Journal, 2010(1):80-83.
[2] 焦建超,唐力伟,汪伟,等. 六自由度振动测试新方法[J].新技术新工艺,2011,9:67-69.
JIAO Jian-chao, TANG Li-wei, WANG Wei, et al. The new programs of six degress of freedom[J]. New Technology & New Process, 2011,9:67-69.
[3] 丁明理,王祁,周庆东. 一种提高角速度解算精度的九加速度计配置方案[J]. 南京理工大学学报,2007,31(2):210-213.
DING Ming-li, WANG Qi, ZHOU Qing-dong. New nine-accelerometer configuration for improving estimating precision of angular rate[J]. Journal of Nanjing University of Science and Technology,2007,31(2):210-213.
[4] 袁西,陈栋,田湘. 三轴数字加速度计ADXL345及其在捷联惯导中的应用[J]. 电子设计工程,2010,18(3):138-140.
YUAN Xi, CHEN Dong, TIAN Xiang. Three axis digital accelerometer ADXL345 and its application in SINS design[J]. International Electronic Elements,2010,18(3): 138-140.
[5] 钟佑明,秦树人.希尔伯特-黄变换的统-理论依据研究[J].振动与冲击,2006,25(3):39-42.
ZHONG You-ming, QIN Shu-ren. Research on the uniform theoretical basis for hilbert-huang transform(HHT)[J]. Journal of Vibration and Shock,2006,25(3):49-42.
[6] 胥保春,袁慎芳.IMF筛选条件分析及新的停止条件[J].振动、测试与诊断,2011,31(3):348-353.
XU Bao-chun, YUAN Shen-fang. IMF stopping criterion of EMD and new stopping criterion[J]. Journal of Vibration, Measurement & Diagnosis, 2011, 31(3):348-353.
[7] 程军圣,于德介,杨宇. Hilbert-Huang变换端点效应问题的探讨[J]. 振动与冲击,2005,24(6):40-42.
CHENG Jun-sheng, YU De-jie, YANG Yu. Disscussion of the end effects in Hilbert-Huang transform[J]. Journal of Vibration and Shock,2005,24(6):40-42.
[8] 郭明威,倪世宏,朱家海,等.振动信号中HHT/EMD端点延拓方法研究[J].振动与冲击,2012,31(8):62-66.
GUO Ming-wei,NI Shi-hong,ZHU Jia-hai,et al. HHT/EMD end extension method in vibration signal analysis[J]. Journal of Vibration and Shock,2012,31(8):62-66.
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:24:26
当代水产(2022年6期)2022-06-29 01:12:20
基层中医药(2021年12期)2021-06-05 06:56:26
软件(2020年7期)2020-12-24 08:01:42
智族GQ(2019年9期)2019-10-28 08:16:21
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
纺织科学研究(2017年6期)2017-07-03 12:14:15