
柔性梁分布式外部载荷识别方法
2014-09-08 03:28史济涛蔡国平
振动与冲击 2014年16期
刘 涛,吴 炜,史济涛,蔡国平
(1.上海交通大学 工程力学系,海洋工程国家重点实验室,上海 200240;2.中国空空导弹研究院,河南 洛阳 471009)
动态载荷确定一直为结构动力学研究重要及难点,而动载荷准确识别为确保结构设计安全、可靠的基本保障;因此,开展动载荷识别技术研究具有重要理论意义及工程应用价值。确定结构动载荷方法有直接测量方法、间接识别方法两种。前者可由直接测量载荷本身或与载荷有关参数确定载荷大小;但对大多数工程结构,所受外部动态载荷较难直接测量获得,如火箭飞行中所受推力、导弹飞行中所受外部风载荷等需采用间接方法对外部载荷进行辨识,即载荷识别技术。动态载荷识别为结构动力学中第二类逆问题,为在已知结构模型及系统输出情况下对载荷进行反演。
动载荷识别技术研究源于航空业。Bartlett等[1]为确定直升机桨毂中心主要谐波频率下动载荷幅值及相位采用频域法进行动态载荷识别研究。动载荷识别有频域法、时域法两种[2-4]。频域法识别原理简单、直观,在频域内建立系统逆向频率响应函数模型,通过系统输出对动态输入进行识别。时域法由Ory等[5]考虑运载火箭飞行载荷时首次提出。时域识别基本思想即利用结构模态参数建立系统在时域内的逆向模型,通过系统动态响应输出识别动态载荷。时域法便于工程应用,使动载荷在线识别成为可能。除频域法、时域法外,随信号处理分析手段、模式识别方法等各种交叉学科发展,如小波分析、基于系统辨识理论的逆系统法、神经网络等逐渐成为动态载荷识别的新工具[2-4]。
本文以柔性梁为对象,采用扰动力观测器与变结构控制相结合方法,给出可分离变量的分布式外部载荷识别技术,并通过数值仿真验证该方法的有效性。对曾采用本文识别技术并以柔性悬臂梁为对象对集中力形式外部载荷进行的识别,效果良好[6]。
1 动力学方程
本文考虑等截面柔性梁横向弯曲振动,见图1。设梁受分布式外部载荷作用,并有r个集中力形式作动器用于梁的振动控制。梁振动方程可表示为
(1)

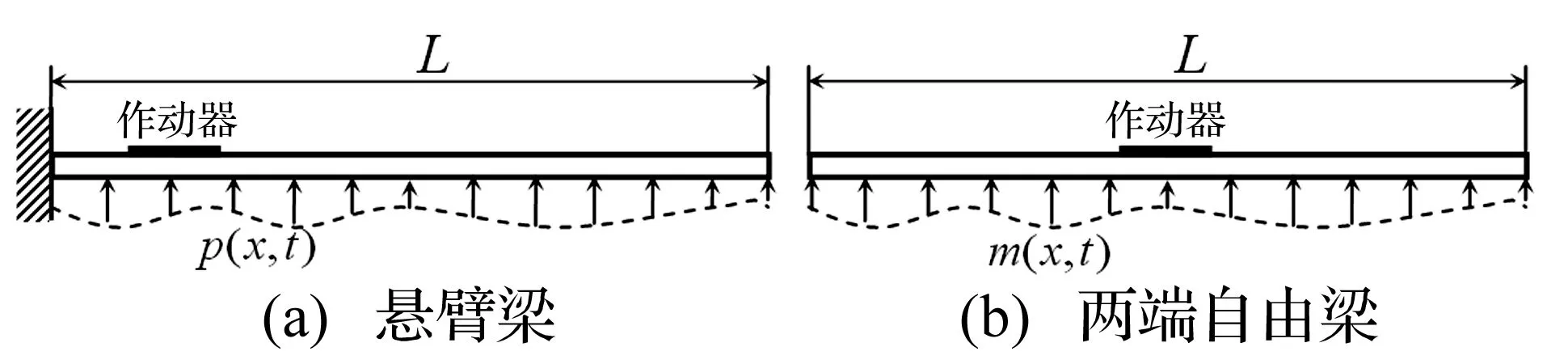
图1 柔性梁结构模型

(2)
式中:ωi为梁第i阶模态振动固有频率;nci(t),ndi(t)分别为第i阶模态控制力、激振力,分别表示为
(3)
式中:L为梁长。
仅考虑分布式外力p(x,t)可拆分为p(x,t)=h(x)f(t),则第i阶模态激振力ndi(t)可描述为
(4)
仅考虑分布式外力矩m(x,t)可拆分为m(x,t)=h′(x)g(t),且m(0,t)=0,m(L,t)=0,则第i阶模态激振力ndi(t)可描述为
(5)
(6)
将式(6)离散化,有:
Zi(k+1)=AiZi(k)+Binci(k)+Bindi(k)
(7)
2 控制设计与扰动力观测器
本文采用离散变结构控制与扰动力观测器相结合的载荷识别方法。柔性梁振动主动控制采用独立模态空间方法,其中控制律设计用离散变结构控制方法,包括切换面确定及控制律设计两部分。
2.1 切换面设计
独立模态空间控制方法要求用r个作动器分别对梁前r阶模态进行主动控制,需确定r个切换面,每个模态控制力皆有自己独立的切换面。切换面设计时,可不考虑外部激励项,此项在控制律设计中予以考虑[7]。式(7)可写为
Zi(k+1)=AiZi(k)+Binci(k),(i=1~r)
(8)
设切换函数具有线性形式[8-9]为
si(k)=CiZi(k),(i=1~r)
(9)
式中:系数矩阵Ci∈R1×2为待确定的切换函数系数向量。

(10)

式(9)切换函数可改写为
(11)

展开式(10),有:
(12)
定义控制模态性能指标为
(13)


(14)
(15)
式(14)、(15)为二次型最优控制问题。据最优控制理论得:
(16)

(17)
由此,系统滑移模态为稳定的,可改写为
(18)

(19)
(20)
式中:C0为常系数,可通过调整C0值使Ci第二个分量为1。由此完成切换面设计。
2.2 控制律及扰动力观测器
本文采用离散变结构控制器与扰动力观测器[8-9]。为减小符号函数引起的抖振现象,将原式中符号函数替换为饱和函数:
qisi(k-1)+κisat[si(k-1)/φi]}
(21)
qisi(k)-κisat[si(k)/φi]}
(22)

(23)
式中:ndi(k)为k时刻外部扰动力实际加载值。
饱和函数sat定义为

(24)
在满足以上选取条件范围内,合理选择参数可减小抖振,使控制及辨识效果更佳。变结构控制方法能取得较好控制效果在于控制律表达式中含外部激励项,故提出如式(21)预估外部载荷的观测器方法。
3 数值仿真
进行数值仿真验证本文所给方法的有效性。分别考虑悬臂梁及自由-自由梁两种模型(图1),梁为铝合金材质,尺寸1 000 ×35×1.5 mm3,密度ρ=2 766 kg/m3,弹性模量E=69 GPa。考虑用压电片为作动器,用于梁的振动控制。为取得较好控制效果,压电片置于梁应变较大处。因此,设悬臂梁根部附近粘贴一片压电作动器(图1(a)),压电作动器尺寸60×15×0.5 mm3,作动器左端距梁固定端xl=70 mm,压电常数d31=17.5×10-9m/V,弹性模量Et=63 GPa。对自由-自由梁,将作动器压电片置于梁中点位置(图1(b))。数值仿真中截取梁前10阶模态响应为梁的真实响应,各阶模态阻尼比取值均为ζi=0.05;式(23)中各参数取值为q1=0.5,κ1=1.6×10-3,g1=0.98,φ1=1.1×10-3。
3.1 悬臂梁仿真

3.2 自由-自由梁仿真
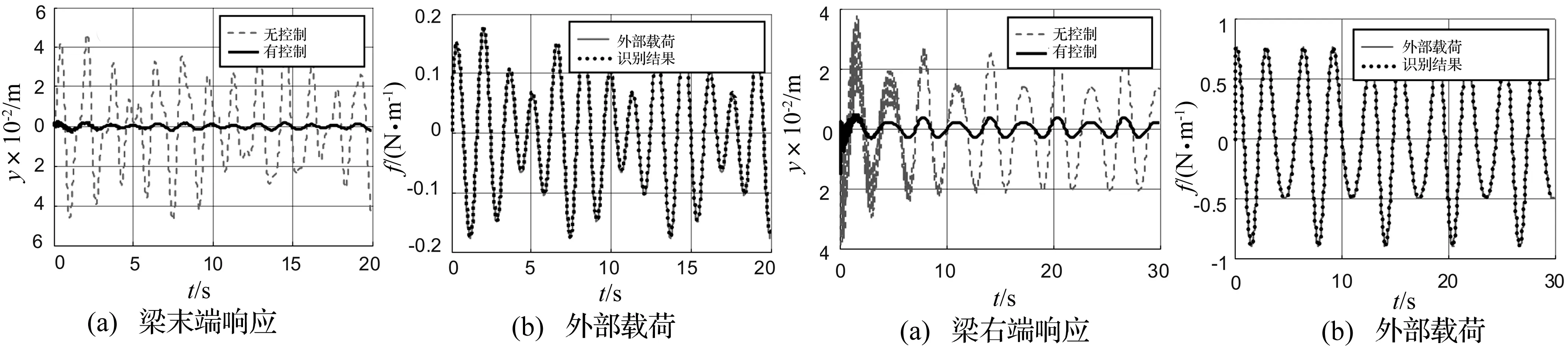
图2 悬臂梁末端响应与载荷辨识结果
4 结 论
本文以柔性梁为研究对象,给出基于变结构控制方法设计的分布式外部载荷识别方法。其扰动力观测器可用于实时观测外部载荷变化情况,并将观测结果用于控制律计算。仿真结果表明,变结构控制律能有效用于柔性梁弹性振动,扰动力观测器能有效识别外部载荷。
[1] Bartlett F D, Flannelly W D. Model verification of force determination for measuring vibration loads[J]. Journal of the American Helicopter Society, 1979, 24(2): 10-18.
[2] 耿苗. 连续分布动载荷识别的频域方法[D]. 南京:南京航空航天大学, 2006.
[3] 张勇成. 二维分布动载荷时域识别技术[D]. 南京:南京航空航天大学, 2007.
[4] 秦远田. 动载荷识别应用技术研究[D]. 南京:南京航空航天大学, 2007.
[5] Ory H, Glaser H, Holzdeppe D. The reconstruction of forcing function based on measured structural responses[C]. Proceeding of 2nd International Symposium on Aeroelasticity and Structural Dynamics, Aachen, FRG, 1985.
[6] 蔡明哲,李超,洪文超,等. 柔性结构的载荷识别[J]. 噪声与振动控制,2013,33(1):64-67.
CAI Ming-zhe, LI Chao, HONG Wen-chao, et al. Load identification of flexible structures[J]. Noise and Vibration Control, 2013, 33(1): 64-67.
[7] Yang J N, Wu J C, Agrawal A K. Sliding mode control for nonlinear and hysteretic structures[J]. Journal of Engineering Mechanics, ASCE, 1995, 121(12):1330-1339.
[8] Wang D A, Huang Y M. Application of discrete-time variable structure control in the vibration reduction of a flexible structure [J]. Journal of Sound and Vibration, 2003, 261(3):483-501.
[9] Gao Wei-bing. Discrete-time variable structure control systems[J]. IEEE Transactions on Industrial Electronics, 1995, 42(2): 117-122.
猜你喜欢
成都信息工程大学学报(2021年1期)2021-07-22
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
制造业自动化(2019年9期)2019-09-27
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年3期)2017-11-23
西安航空学院学报(2017年3期)2017-07-05
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年2期)2016-12-01
