手扶式葡萄园施肥机设计
2014-09-06 11:33:55,,,
机械与电子 2014年12期
,, ,
(河海大学机电工程学院,江苏 常州 213022)
手扶式葡萄园施肥机设计
钮金亮,李向国,安芳,李佳鹏
(河海大学机电工程学院,江苏 常州 213022)
针对葡萄农业的发展现状,根据葡萄生产的实际情况,研究设计了一种能在狭窄葡萄园内灵活作业、进行地表施肥的手扶式施肥机。
手扶式;葡萄园施肥机;地表施肥
0 引言
在农业生产中,施肥是必不可少的环节。葡萄种植季节性强、生产环节多且复杂,而传统的手工操作,劳动强度大、效率低、效果差[1]。目前,虽然有很多施肥机是专用于葡萄园施肥,但是基本都是利用大型机械驱动,例如拖拉机等[2];然而,为了提高土地利用率,葡萄园内空间有限,大型机械在葡萄园内无法灵活地进行施肥作业。在实际生产中,对葡萄进行地表施肥次数占总施肥次数很大比例,尤其在葡萄成熟季节,由于葡萄成熟期短,为了保证葡萄的品质,经常会对葡萄进行催肥,催肥方式以地表施肥为主,然后通过灌溉的方式加快肥料的溶解,加快葡萄对肥料的吸收。地表施肥虽然有污染果园环境、使肥料大量流失和难于充分发挥肥效等缺点[3],但是地表施肥具有吸收快这一其他施肥方式无可比拟的优点,它能保证葡萄短期内肥料的供应,能够以最快的速度获得施肥效果。地表施肥的方式以人工操作为主,这样就存在施肥不均匀、增加劳动时间及强度、浪费劳动力等缺点[4]。
1 结构与工作原理
1.1 结构
葡萄园手扶式施肥机结构图如1所示。

图1 施肥机总体结构
1.2 工作原理
施肥机的动力源为微型汽油发动机。微型汽油发动机通过联轴器与减速器输入轴连接,减速器输出轴上装有链轮组,通过链条将动力向2个方向传递:一方面通过驱动前轮,为施肥机前进提供动力;另一方面驱动螺旋拨肥轴,拨肥轴匀速转动能够使肥料均匀地从肥料箱中流出,避免了因肥料自身重力因素造成出肥速度不均匀现象的影响。施肥机的前进方向通过万向轮来控制,施肥机扶手上安装有肥量控制器和鼓风机开关,通过肥量控制器来控制出肥量的大小,进而控制施肥量;鼓风机将从出肥管流出的肥料吹散,均匀地吹撒在葡萄渠中,完成施肥作业。
2 主要工作部件的设计
2.1 肥料箱
肥料箱由薄钢板制成。肥料箱的左右两边有耳板,机架上有与耳板配合的凹槽,将肥料箱固定在机架上,便于装卸。肥料箱下部分装有螺旋拨肥轴,底部设置有出肥管总成。
2.2 万向轮
万向轮主要由轮胎、幅板、轮轴和叉架组成。轮胎采用经久耐用的实心轮胎,幅板和叉架由钢板冲压而成,轮轴用圆钢制造,两端设有螺纹,与螺母配合。
2.3 扶手
扶手由机架延伸出来,扶手上有肥量控制器,通过软轴与出肥管总成连接,控制出肥量的大小;扶手上还设置有鼓风机开关,控制鼓风机。
2.4 动力系统
施肥机动力系统由微型汽油发动机、联轴器和减速器组成。微型汽油发动机的输出轴与减速器输入轴通过联轴器连接,减速器输出轴装有链轮组[5]。整个动力系统放置在可移动托架上,可移动托架可以通过转动丝杠实现上下移动,调节链传动系统中链条的张紧度。减速器主要由箱体、齿轮、齿轮轴、轴及轴承等组成。箱体由铸铁铸造,经后续机械加工而成;各齿轮均由40Cr圆钢制造,调制后表面淬火;各齿轮轴也采用40Cr圆钢制造,并经调制处理[6]。
2.5 链传动系统
链传动系统由链轮、链条和链盒组成。螺旋拨肥轴和前轮轴上都装有链轮。减速器输出轴装有链轮组,通过链条将动力分别传递给螺旋拨肥轴和前轮轴。链条外部有链盒,来保护链盒平稳工作。
2.6 机架
机架分前、中、后3部分,前部分机架装有前轮,中间部分由凹槽,与肥料箱耳板配合,后部分机架装有2个万向轮。
2.7 出肥管总成
出肥管总成由挡板、弹簧和出肥管组成。出肥管通过软轴与肥量控制器相连,通过肥量控制器可以改变挡板位置来控制出肥口的大小,进而控制施肥量。
3 基本参数的确定
3.1 确定链轮参数
选取减速器输出轴驱动前轮链轮齿数z11=17,选取前轮轴上链轮齿数z2=38,链条链号选用08A,查表可得链条的节距p=12.7 mm,则大链轮分度圆直径为:

(1)
3.2 计算确定链传动系统各参数
人正常行走速度为1.1~1.5 m/s,这里按照vp=1.5 m/s计算,施肥机的前进速度和人的正常行走速度相等,所以v=vp=1.5 m/s,前轮直径d=0.36 m。
计算驱动链条的速度为:

(2)
v2=0.64 m/s。
计算大链轮的转速:
(3)
n2=79.6 r / min。
计算减速器输出轴链轮组转速为:
(4)
n1=178 r/min。
3.3 选择汽油发动机
施肥机自重M=100 kg,最大装肥量m=50 kg,施肥机轮胎采用实心轮胎,与泥土路的摩擦系数μ=0.3~0.35,重力加速度g=9.8 m/s2,则轮胎抓地力为:
F=μ(M+m)g=514.5 N
(5)
根据功率计算公式有:
P=F·v=771.75 W
(6)
选用汽油发动机的功率P=0.9 kW,转速n0=6 500 r/min,输出扭矩为:
(7)
3.4 减速比计算
减速器减速比为:
(8)
驱动前轮的链轮减速比为:
(9)
输入轴提供扭矩为:
T0=i0×i1×T=106 N·m
(10)
输出轴所需最大扭矩为:

(11)
T0>T1,所以发动机选用合理。
由于螺旋拨肥轴所需功率较小,在这里可以忽略不计。
3.5 螺旋拨肥轴相关参数的确定
螺旋拨肥轴采用梯形螺纹,查取国家标准,选用梯形螺纹参数[7],大径d=100 mm,中径d2=90 mm,小径d1=78 mm,螺距p=20 mm,旋向为左旋。
化肥的堆密度ρ=900~1 200 kg/m3。
通过计算,得梯形螺纹旋转1周所旋出化肥的体积V=9.9 π·cm3。
化肥的堆密度按照ρ1=1 200 kg/m3计算,螺旋拨肥轴每转1转所旋出的化肥的质量,即
m1=ρ1×V=0.011 88 πkg/r
(12)
根据葡萄园实际施肥情况,计算得葡萄园最大施肥量为S=0.225 kg/m2;人前进速度为vp=1.5 m/s;葡萄渠宽L=1.0 m;计算得施肥机的排肥量为:
m2=S×vp×L=0.11~0.337 5 kg/s
(13)
施肥机排肥量按照m2=0.337 5 kg/s计算,即20.25 kg/min。
所以有:
m×n3=20.25 kg/min
(14)
计算的得螺旋拨肥轴转速为n3=542.6 r/min。
选取螺旋拨肥轴链轮齿数z3=17,链传动系统的传动比为:
(15)
进而可得减速器输出轴驱动螺旋拨肥轴链轮齿数为:
(16)
计算得z12=51。
手扶式施肥机其他参数如表1所示。
表1 施肥机参数
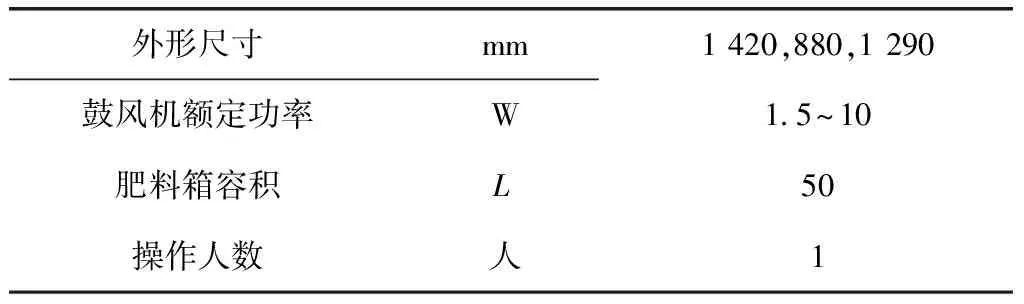
外形尺寸mm1420,880,1290鼓风机额定功率W1 5~10肥料箱容积L50操作人数人1
4 主要特点
a.结构简单。简单轻便的机构,小巧的体积,使施肥机工作起来灵活、平稳、耐用。
b.适应性强。体积小,可以在狭小的葡萄园内进行施肥作业,不受空间的限制。
c.操作简单。施肥机容易操作,农民朋友能够快速的掌握使用技巧。
d.节约劳动力成本。施肥机取代人工施肥,减少了劳动量,降低了劳动强度。
5 结束语
葡萄园手扶式施肥机的研究设计,为农业机械领域增添了新机械,使葡萄园地表施肥作业发生了质的变化,明显地提高了施肥的效率和质量,节约劳动力,满足广大葡萄园种植户的需要,对葡萄农业的发展,提高葡萄果品起到了重要的作用。该机质量小、成本低、体积小、便于操作,具有良好的推广和应用价值。
[1] 王晓东,王合.2BF-1型自走式播种施肥机的研究设计[J].农业机械,2012(31):107-108.
[2] 屠留芳,杨刚,孙星钊.葡萄园专用开沟施肥机的设计[J].农机化研究,2012,31(11):87-89.
[3] 杨淑艳.人工栽培山葡萄施肥技术[J].北方园艺,2012(19):46-47.
[4] 阴喜文.葡萄旋耕施肥机:中国,201220139017.1[P].2012-12-26.
[5] 王钦连.自动施肥机:中国,200920092945.5[P].2009-12-30.
[6] 濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2006.
[7] 鲁屏宇.工程图学[M].北京:机械工业出版社,2009.
Design of Vineyard Walk-behind Fertilizer Machine
NIUJinliang,LIXiangguo,ANFang,LIJiapeng
(College of Mechanical and Electrical Engineering,Hohai University,Changzhou 213022,China)
This walk-behind fertilizer machine is designed in the light of current development of domestic grape farming and production.It functions as one which works flexibly on surface fertilization in narrow vineyard.
walk-behind; vineyards fertilizer machine; surface fertilization
2014-07-03
S224.21
A
1001-2257(2014)12-0040-03
钮金亮(1992-),男,河北乐亭人,本科,机械工程及自动化专业;李向国(1979-),男,吉林松原人,硕士,讲师,研究方向为机电系统控制及自动化技术。
猜你喜欢
农业工程学报(2022年1期)2022-03-25 01:13:24
农业机械学报(2021年10期)2021-11-09 08:35:52
绿色科技(2019年23期)2019-02-07 05:34:41
中国瓜菜(2018年12期)2018-12-15 03:03:34
汽车零部件(2018年11期)2018-12-08 06:24:22
无机盐工业(2018年11期)2018-11-15 11:05:48
制造技术与机床(2017年11期)2017-12-18 06:47:08
设备管理与维修(2016年7期)2016-04-23 06:51:42
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
江苏农机化(2015年6期)2015-12-07 11:58:18