
基于制动意图模糊识别的电动汽车再生制动研究
2014-08-23 06:09宋百玲周学升
森林工程 2014年6期
宋百玲,周学升
(东北林业大学 交通学院,哈尔滨 150040)
蓄电池-超级电容双能量源纯电动汽车与单一蓄电池纯电动汽车相比可以满足纯电动汽车对比能量和比功率的双重要求,延长电动汽车的行驶里程。如何高效回收再生制动能量是双能量源纯电动汽车的关键技术。再生制动技术是电动汽车节能和环保的关键技术之一。基于模糊推理的驾驶意图识别方法[1],制动意图的模糊识别成为目前研究的热点[2]。国内对双能量源纯电动汽车再生制动模糊控制策略也进行了相应的研究[3]。制动意图模糊识别在双能量源电动汽车再生制动方面的研究还相对较少。
本文运用制动意图模糊识别的方法提出一种简单高效的双能源电动汽车再生制动回收策略,并通过建模仿真验证理论的可行性。
1 制动意图的分类及识别参数的确定
研究过程中,把制动模式分为常规制动模式和滑行制动模式,常规制动模式分为紧急制动、一般制动和平缓制动。制动模式的识别主要依据驾驶员对制动踏板有无动作。驾驶员对制动踏板有动作时为常规制动模式,驾驶员对各个踏板无动作时为滑行制动模式,滑行制动的减速度很小。
常规制动模式的识别主要靠制动踏板开度和制动踏板开度变化率两个参数。制动踏板的开度在一定程度上反映了制动的紧急程度,但仅依靠制动踏板开度还不能完全反应出驾驶员制动的紧急程度,因此引入制动踏板变化率并结合制动踏板开度来对制动的紧急程度进行区分[4-5]。
设计的制动意图模糊识别的电动汽车再生制动流程如图1所示。

图1 制动意图模糊识别的再生制动流程
2 制动意图模糊辨识器设计
2.1 识别参数隶属函数的确定
制动踏板开度隶属度函数曲线如图2所示。
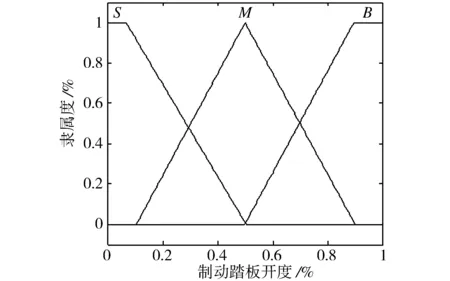
图2 制动踏板开度的隶属度函数
制动踏板开度变化率隶属函数曲线如图3所示。
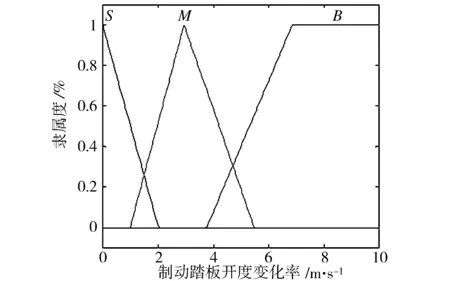
图3 制动踏板开度变化率隶属度函数
制动减速度反映的是制动强度状态,输出状态“L”代表平缓制动意图,输出状态“M”代表一般制动意图,输出状态“H”代表紧急制动意图[6]。制动减速度隶属度函数如图4所示。
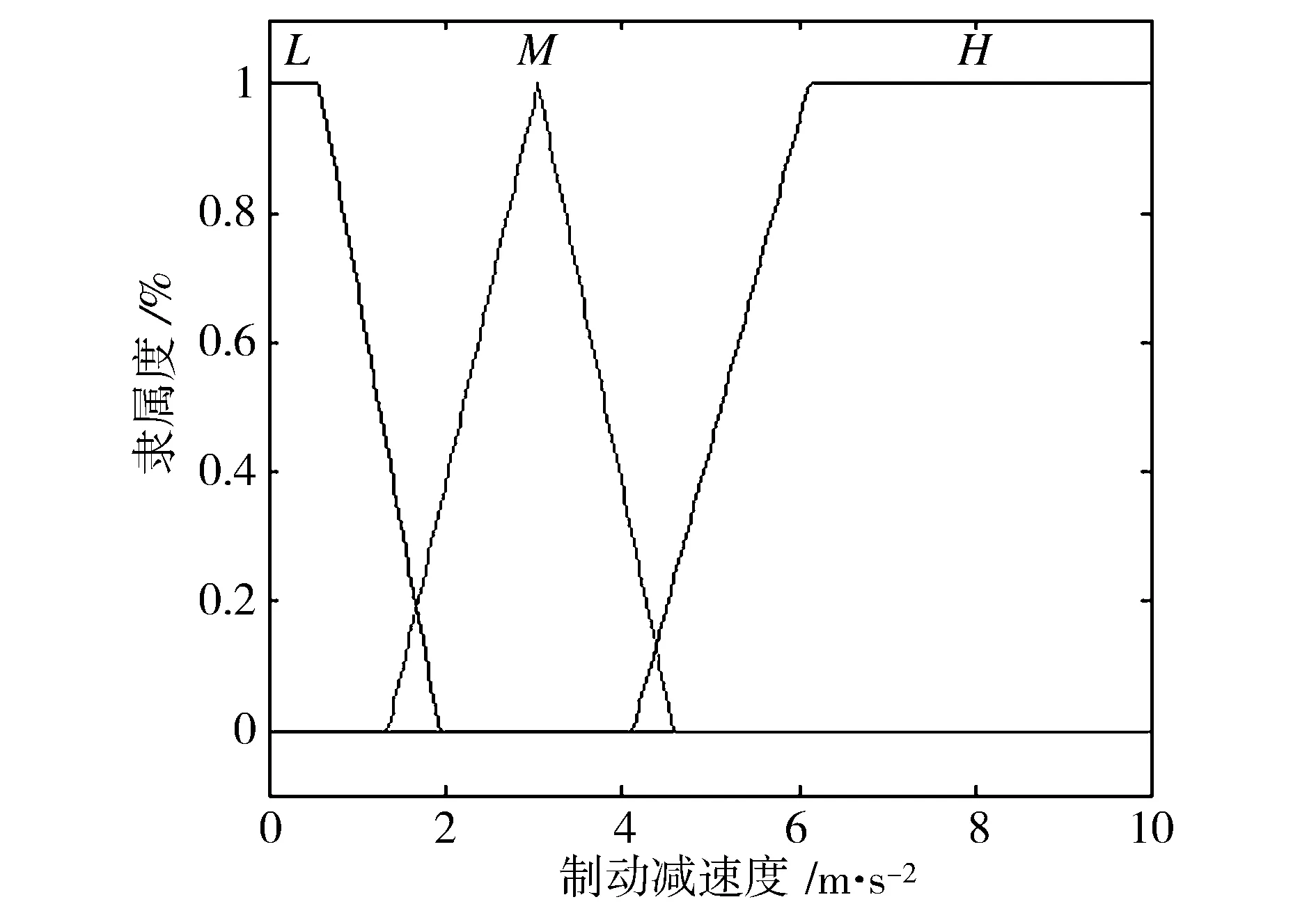
图4 制动减速度隶属度函数
2.2 模糊推理规则确定
实车测量大量常规制动过程的数据见表1。
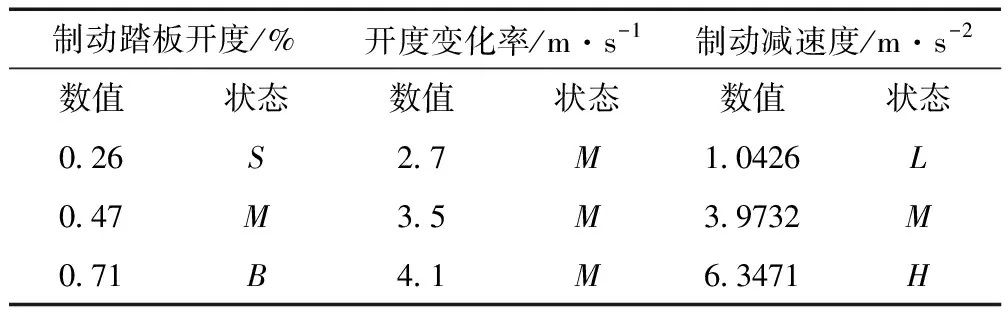
表1 常规制动过程部分工况数据
根据表1的实车工况数据,建立模糊识别器的推理规则见表2所示。

表2 模糊辨识器的推理规则
3 双能量源纯电动汽车再生制动模糊控制策略
3.1 模糊控制器设计
双能量源纯电动汽车的原理是:在汽车制动时将行驶的惯性能量传递给电机,使电机工作在发电状态,给双能量源充电,从而实现制动能量的回收,同时电机发电过程中产生的制动力矩对驱动轮进行制动,产生制动力矩和制动力[7]。研究中,电机发电状态产生的电能优先给双能量源的超级电容充电,因此本文只讨论超级电容soc的状态。
超级电容soc的隶属度函数如图5所示。
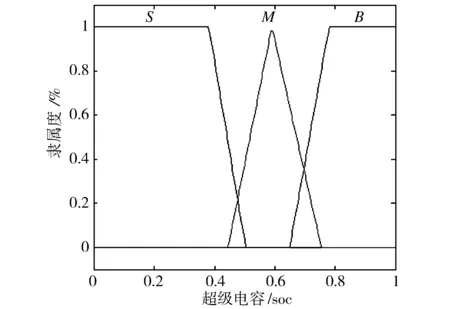
图5 超级电容soc的隶属度函数

图6 电机制动力分配比例隶属度函数
3.2 模糊推理规则
制定的模糊推理规则见表3。
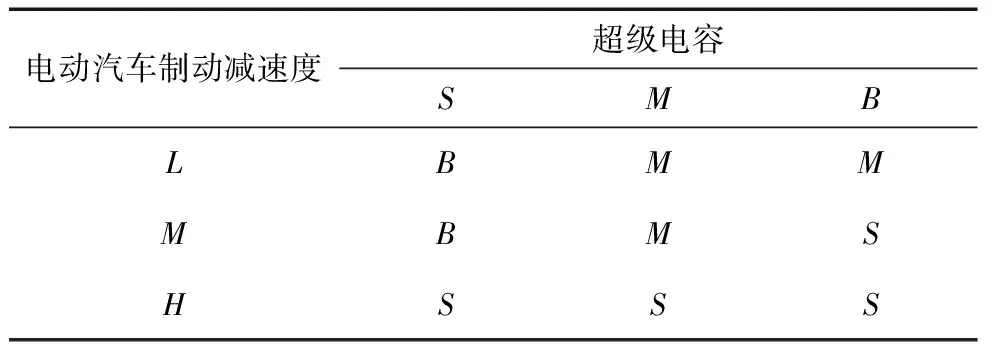
表3 再生制动模糊推理规则
4 仿真分析
双能量源纯电动汽车再生制动能量回收simulink模型如图7所示。
将搭建的再生制动控制仿真模型嵌入基于ADVISOR搭建的双能量源电动汽车制动控制器中,为验证本文控制策略的有效性,将其与传统的比例分配再生制动控制策略在CYC-UDDS工况下进行仿真对比,如图8所示。
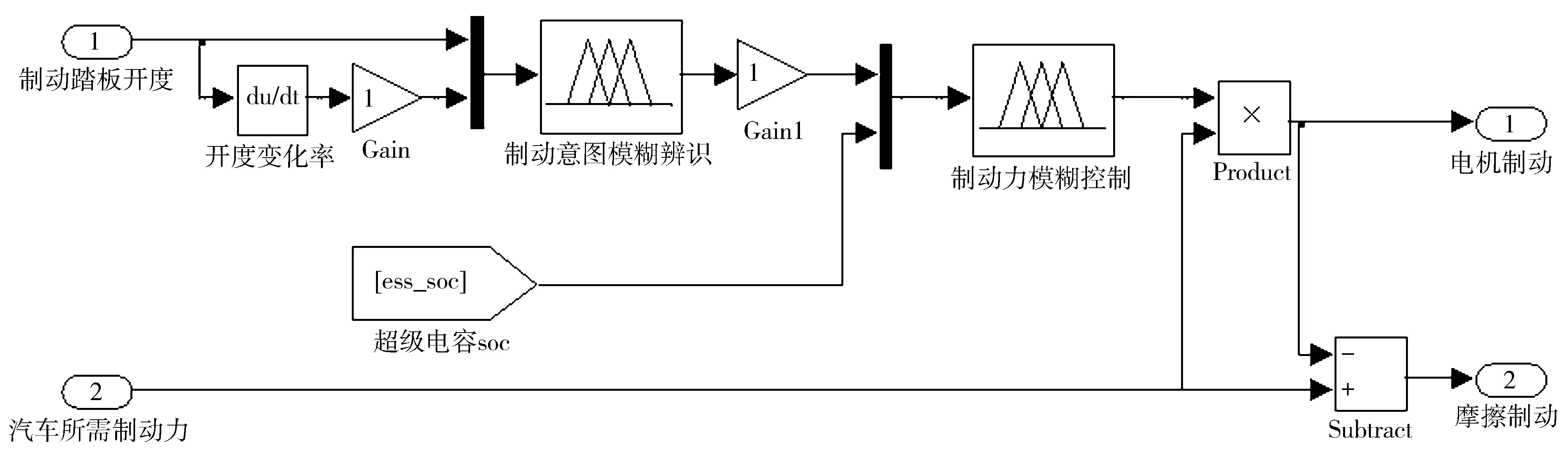
图7 双能量源电动汽车制动能量回收模型
由图9和图10可知,soc初值为1时,控制策略下超级电容soc值下降幅度小于前者,工况结束后超级电容荷电状态由0.362提高到0.537,说明采用制动意图模糊识别控制策略后双能量源电动汽车回收了更多的制动能量。
5 结 论
本文将双能量源电动汽车制动意图分为常规制动和滑行制动,分别基于大量工况数据和人工经验确定模糊逻辑推理规则,设计模糊辨识器识别所划分的制动意图。
从仿真结果可以看出,基于制动意图模糊识别的双能量源再生制动控制仿真模型可以比较好的识别制动意图,并且在一定程度上增加了制动能量的回收,从而进一步提高双能量源电动汽车的能量使用的经济性。
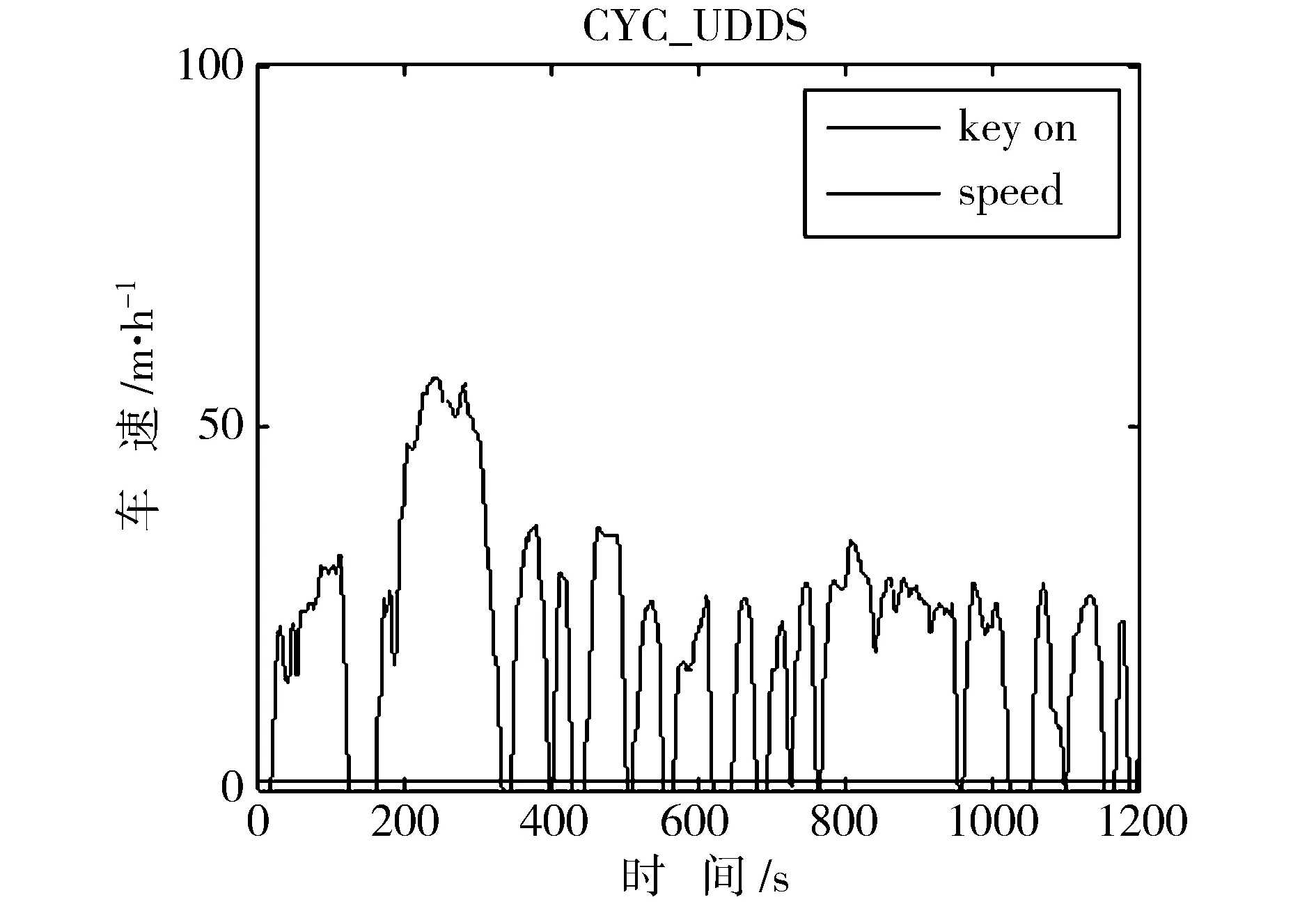
图8 CYC-UDDS工况曲线图
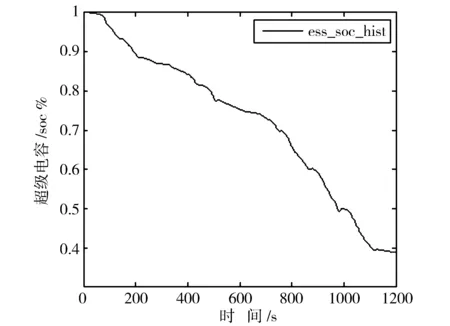
图9 没有制动意图识别的电动汽车超级电容soc变化曲线

图10 采用制动意图识别的电动汽车超级电容soc变化曲线
【参 考 文 献】
[1]王玉海,宋 健,李兴坤.基于模糊推理的驾驶员意图识别研究[J].公路交通科技,2005,22(12):113-118.
[2]孙 磊.HEV驾驶员制动意图识别及控制算法研究[D].长春:吉林大学,2012.
[3]张昌利,张亚军,闫茂德,等.双能量源纯电动汽车再生制动模糊控制与仿真[J].系统仿真学报,2011,23(2):233-238.
[4]王庆年,唐先智,王鹏宇,等.基于神经网络的混合动力汽车驾驶意图识别方法[J].农业机械学报,2012,43(8):32-36.
[5]马其贞.基于制动意图识别的制动能量回收控制算法研究[D].长春:吉林大学,2013.
[6]林巨广,顾 杰,朱茂飞.基于驾驶意图模糊识别的PHEV输出转矩控制的研究[J].汽车工程,2012,34(11):984-989.
[7]Jeon S I,Jo S T,Park Y I,et al.Multi-mode driving control of a parallel hybrid electric vehicle using driving pattern recognition [J].JournalofDynamicSystems,Measurement,andControl,2002,124(1):141-149.
[8]李士勇.模糊控制·神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,2006.
[9]于 健,万健如,许镇琳.电动汽车能量控制系统的动态建模与仿真[J].计算机仿真,2008,25(4):472-476.
[10]陈庆樟,何 仁,商高高.基于ABS的汽车能量再生制动集成控制研究.汽车工程,2008,30(4):301-304.
猜你喜欢
车主之友(2022年6期)2023-01-30
法律方法(2022年2期)2022-10-20
福建基础教育研究(2022年4期)2022-05-16
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
法律方法(2021年3期)2021-03-16
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
黄河之声(2017年13期)2017-01-28
