一种四吊点电磁挂梁起重机回转吊具
2014-08-21 09:30闫俊峰
机械管理开发 2014年2期
闫俊峰
(太原重工股份有限公司技术中心起重所,山西 太原 030024)
引言
目前,生产实践中使用了各种各样的旋转吊具,从简单的电动回转吊钩滑轮到双吊点回转龙门吊具以及双吊点回转电磁挂梁吊具等,回转吊具均活跃在各种各样的工程实践中。本文简绍一种四吊点电磁挂梁起重机回转吊具,实现较为精准的实现杆状物料的吊运、回转和摆放。
1 常用回转吊具简介
1.1 电动回转吊钩滑轮组
这种回转吊具是在传统的吊钩滑轮组基础上改造而成。传统吊钩滑轮组回转部分单钩由单钩、吊钩横梁、吊钩螺母及回转支撑轴承等部分组成,通常采用人工旋转空载单钩方便悬挂重物。当吊具较大和需要带吊重旋转时,回转机构就需要克服轴承的滚动摩擦力和吊重偏载产生的回转阻力。将三和一减速机通过花键连接装配在单钩末端、以吊钩横梁为支撑,实现电动回转吊钩滑轮组的单钩回转(如图1所示)。
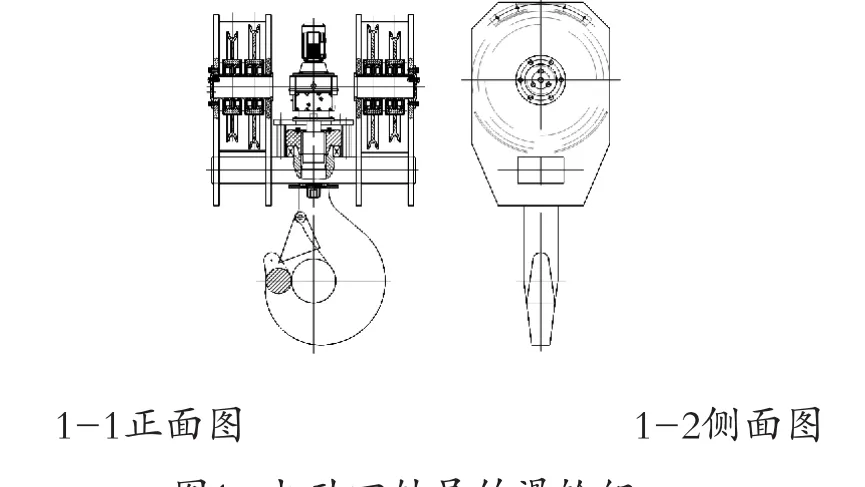
图1 电动回转吊钩滑轮组
回转吊重的体积小,回转惯性小,需要的电机功率也不大,具有较高的工作效率。这种回转吊具适用于桥式起重机带回转功能的场合。
1.2 双吊点回转龙门吊具
双吊点可回转龙门吊具主要用在钢厂铸造起重机钢包的吊运和回转(如图2所示)。
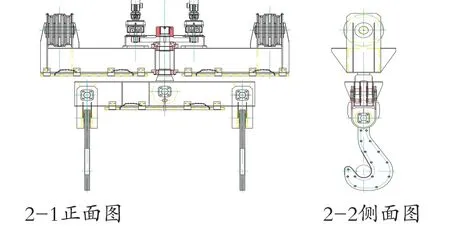
图2 双吊点回转龙门吊具
双吊点回转龙门吊具由上部横梁和动滑轮组、下横梁、连接吊叉及回转机构等部分组成。三合一减速机通过小齿轮输出扭矩带动大齿轮,大齿轮带动吊叉回转,实现钢包旋转。其中大齿轮的设计是为了传递更大的扭矩给旋转钢包。
1.3 双吊点回转电磁挂梁吊具
双吊点回转电磁挂梁吊具主要用在杆状物料的吊运和回转(如图3所示)。

图3 双吊点回转电磁挂梁吊具
双吊点回转电磁挂梁吊具同样由上部横梁和动滑轮组、下横梁、连接吊叉及回转机构等部分组成。三合一减速机通过小齿轮输出扭矩带动大齿轮,大齿轮带动吊叉回转,实现杆状物料的不同角度摆放。由于杆状物料相对的转动惯量较大,大齿轮的设计更有效的传递更大扭矩。当下横梁旋转与上横梁呈现不同角度时,由于杆状物料起吊位置的随机性,有不同程度的偏载,不利于物料的搬运。当杆状物料特别长时,表现尤为明显。通过起重机起升机构配合的旋转机构旋转同样能够实现杆状物料的旋转和摆放,但这种设计需要增加整台起重机的高度和小车的设计难度,同时增加了设计成本。
现有的磁盘吊旋转吊具的驱动机构多采用减速机输出长轴驱动小齿轮旋转,小齿轮与大齿轮配合驱动电磁挂梁旋转,实现旋转吊具工作。这种结构构造复杂,齿轮啮合面暴露于空中,润滑不好,齿轮磨损快。
2 四吊点旋转电磁挂梁起重机回转吊具的特点
当物料的吊运、摆放和旋转需要更高的精度时,双吊点回转电磁挂梁吊具无法满足吊运工作。随着旋转驱动机构的发展,高强度材料的广泛应用,本文提出一种四吊点旋转电磁挂梁起重机回转吊具(如图4所示)。
旋转吊具功能实现过程如下:电磁盘1通过柔性连接吊于电磁挂梁2下端,电磁挂梁2上部法兰与旋转轴8对接,旋转轴8端部螺纹与吊钩螺母10连接将力作用到轴承11上,推力轴承11上的压力再通过轴承座12传导到十字梁3上,再以位于十字横梁3端部的动滑轮7作为四个受力点,实现吊具的升降功能。起升过程中电缆落入位于十字梁3上的电缆框6内。
电机4工作时带动减速机5,通过减速机5输出轴内花键与旋转轴8上外花键配合带动旋转轴8旋转,旋转轴8再带动电磁挂梁2旋转进一步带动吸附于电磁盘1下面的钢料旋转,实现旋转吊具的回转运动。减速机支座9在吊具回转运动中传递减速机5与十字梁3之间的反向扭矩。定位轴承13保证旋转轴8旋转过程中精确定位,密封法兰14位于轴承座12端部并与旋转轴8配合。
旋转轴8与电磁挂梁2端部法兰螺栓连接,轴承座12与密封法兰14、定位轴承13、旋转轴8、吊钩螺母10、推力轴承11可形成部件整体拆装。
由于四吊点成正交十字布置,这种布置即使四吊点受力不均,也不会发生倾斜,故当所吊钢料重心偏离回转中心时,十字梁3和电磁挂梁2及所吊钢料均不会出现倾斜,旋转过程平稳。
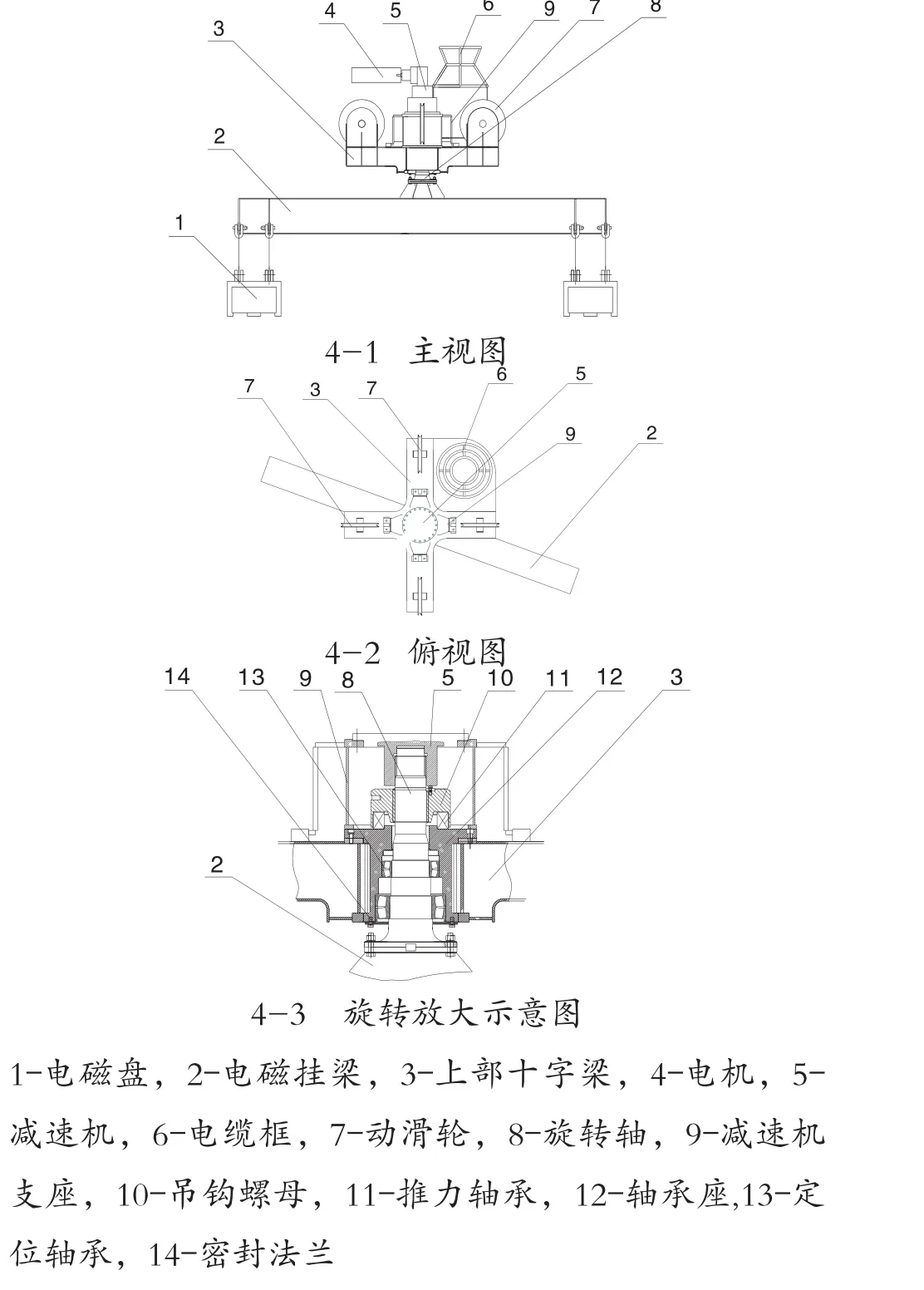
图4 四吊点旋转电磁挂梁起重机回转吊具
3 结语
四吊点旋转电磁挂梁起重机回转吊具有效的克服了双吊点回转电磁挂梁吊具在杆状物料工作过程中表现出的缺点,旋转过程平稳。较好地实现了杆状物料较为精准的吊运、回转和摆放。
[1] 张质文.虞和谦,王金诺,等.起重机设计手册[M].北京:中国铁道出版社,1998.
[2] GB 6067-85 起重机械安全规范[S].
[3] 沈红.机械工程师手册[M].北京:机械工业出版社,1989.
猜你喜欢
经纬天地(2022年3期)2022-07-20
起重运输机械(2021年21期)2021-11-24
山西冶金(2020年3期)2020-07-15
制造技术与机床(2019年12期)2020-01-06
专用汽车(2018年10期)2018-11-02
山西冶金(2017年6期)2018-01-17
中国铸造装备与技术(2017年3期)2017-06-21
制造技术与机床(2017年2期)2017-05-04
光学精密工程(2016年4期)2016-11-07
铸造设备与工艺(2015年3期)2015-07-11