采煤机变频器的软件设计与实验研究
2014-08-15 03:09:16
应用能源技术 2014年11期
(黑龙江省能源研究所,哈尔滨 150001)
0 引 言
采煤机是煤矿开采的重要动力设备,其安全、高效、稳定地运行是煤矿生产的重要保障。对采煤机电动机实时控制是其安全运行的重要保障。由于新型电力电子器件的不断发展,变频技术获得了高速发展。变频器和交流电机构成的可调速传动用于保证采煤机运行可靠、平滑加减速和定位控制等功能[1-3]。文中采用TMS320F2812为变频控制系统的核心,对其进行设计与实验研究。
1 变频调速系统
该变频器设计采用TMS320F2812为控制系统的核心,采用EPM7128SLC84-15(84)为辅助控制电路。其主要实现了控制电动机频率在1~50 Hz内可调,频率分辨率为1 Hz。以TMS320F2812芯片作为电动机控制系统的核心控制芯片[4-5]。基于TMS320F2812的电压空间矢量PWM控制方案组成的交流变频调速系统的硬件结构框图,如图1所示。

图1 交流变频调速系统的硬件结构
由图1可见,其主要由主电路、CPLD辅助控制电路、驱动电路检测电路、DSP控制器、和人机界面组成。
2 软件的设计
2.1 主程序流程
主程序对硬件和变量进行初始化,初始化各变量的地址,同时设定变量相应的初值。其具体流程图如图2所示。
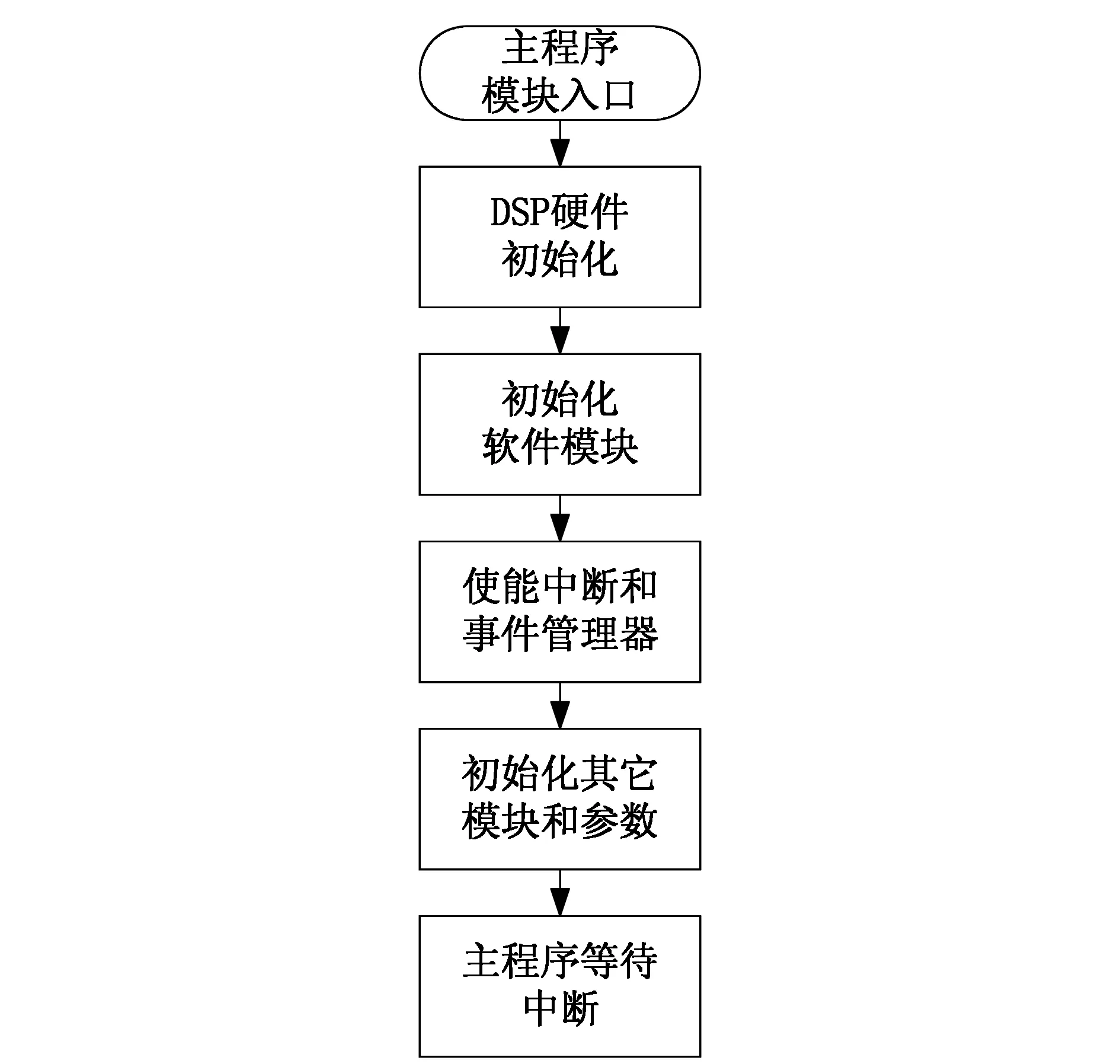
图2 DSP主程序流程图
2.2 PWM中断服务程序
采用模块化编程思想,控制系统的DSP可以方便地进行电压空间矢量的输出。中断程序是用来实现电压和电流的检测与控制,坐标变换和的调制,中断服务程序是系统实现矢量控制的核心[6]。其中中断服务子程序具体流程如图3所示。
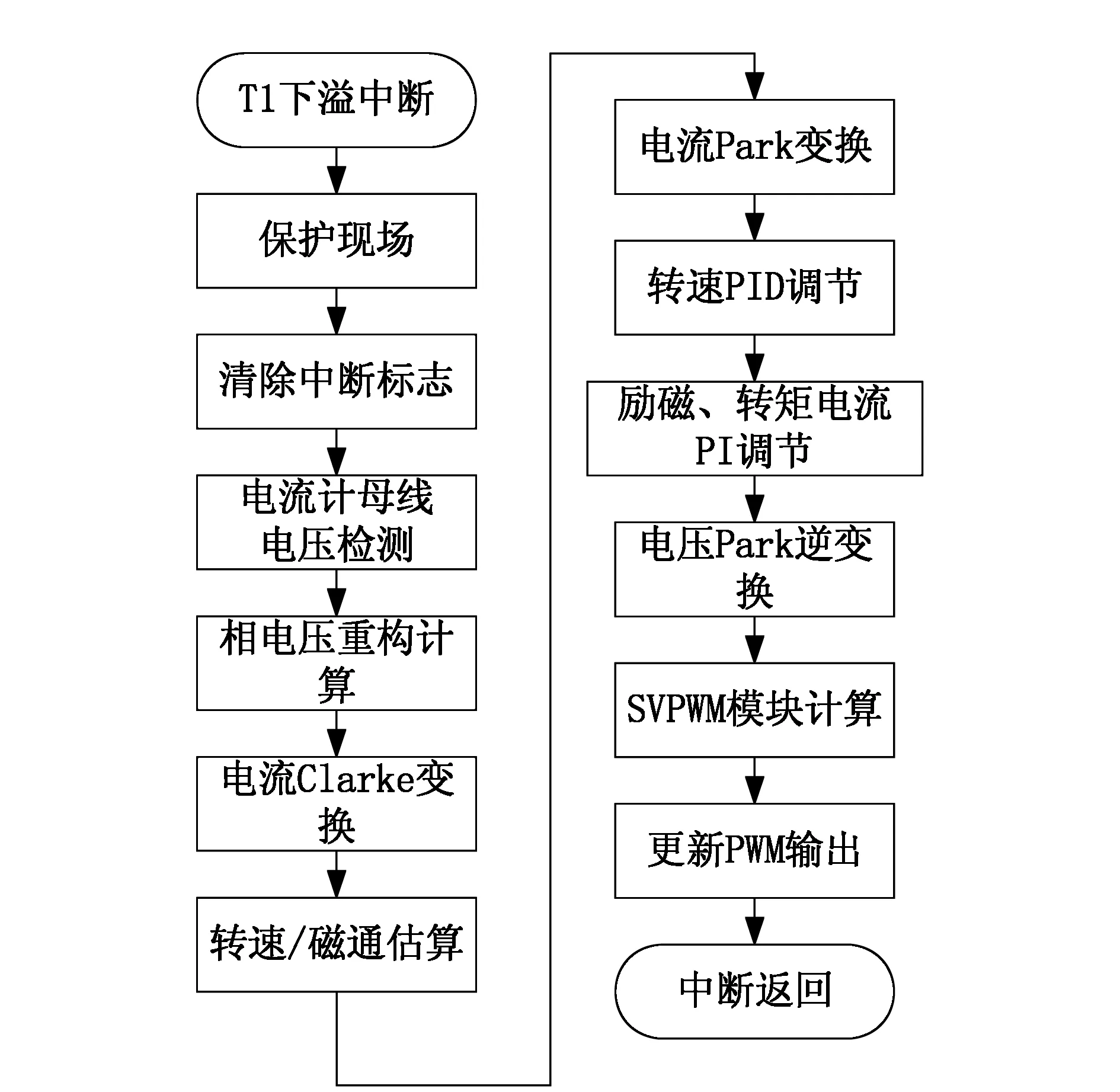
图3 PWM中断服务子程序流程
2.3 SVPWM算法程序
SVPWM算法的流程:在α-β坐标下系确定电机的输出电压u,分解电压,在每个周期里,确定电压u所在的扇区以及与此两个相邻的基本电压矢量的uα和uβ;同时确定时间TX和TY的值;计算Tcm1,Tm2和Tcm3三个值并将其分别写入相应的寄存器CMPR1, CMPR2和CMPR3里。SVPWM具体算法流程如图4所示。

图4 SVPWM算法流程
3 实验结果与分析
控制系统DSP在50 Hz输出的SVPWM波形如图5所示。

图5 50 Hz频率输出的SVPWM波形
DSP在50 Hz输出的SVPWM波经过低通滤波器得到的波形和三相电流波形如图6所示。

图6 50 Hz频率经过低通滤波器输出波形
逆变电路在50 Hz的频率时输出三相电流波形如图7所示。

图7 50 Hz频率的逆变电路输出的电流波形
由图7可知,采用SVPWM进行调制时电机电流的谐波小,电机的电压利用率高,高频噪声低。
4 结束语
所设计的变频器采用软件法实现了空间矢量脉宽调制,该方法比硬件法谐波含量相对减少,最终实现了频率调节范围为1~50 Hz的三相交流变频调速系统。使用该方法可以使逆变器输出电流的谐波成分减少、使电动机的谐波损耗明显降低,同时减小转矩的脉动,其能够提高采煤机的效率,节约能耗,提高煤炭生产的效益。
[1] 高俊岭,柏方艳,严宏宽.基于PLC 的AM50 采煤机电控系统[J].微计算机信息2002,18(4):5-6.
[2] 王志武.国内外采煤机截割调速系统的分析[J].煤矿机电,2004,3(3):27-33.
[3] 万山明.TMS320F281X DSP原理及应用实例[M].北京:北京航空航天大学出版社,2007.
[4] 李晓豁,吴志强.基于参数自适应模糊PID控制器的采煤机恒功率调速系统[J].制造业自动化,2009,31(1):45-47.
[5] 李珊珊,尹作振,张广超.基于PLC的采煤机控制开关在井下的应用[J].机电信息,2010(30):163.
[6] 胡志栋,徐康博.液压拉伸器用螺栓的可靠性分析[J].森林工程,2012(2):38-41+46.
猜你喜欢
防爆电机(2022年1期)2022-02-16 01:14:06
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
现代防御技术(2016年1期)2016-06-01 12:13:28
设备管理与维修(2016年7期)2016-04-23 06:51:55
新高考·高一物理(2016年1期)2016-03-05 22:47:39
自动化博览(2014年4期)2014-02-28 22:31:12
河南科技(2014年23期)2014-02-27 14:18:59
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18
河南科技(2014年3期)2014-02-27 14:05:52