
面向交通枢纽的车辆三维真实感实时仿真
2014-08-11 08:45蔡梦佳胡永利
交通工程 2014年3期
蔡梦佳, 孟 均, 张 勇, 胡永利
(1.北京工业大学 城市交通学院 多媒体与智能软件技术北京重点实验室, 北京 100124;2.北京市路桥管理养护集团, 北京 100097)
面向交通枢纽的车辆三维真实感实时仿真
蔡梦佳1, 孟 均2, 张 勇1, 胡永利1
(1.北京工业大学 城市交通学院 多媒体与智能软件技术北京重点实验室, 北京 100124;2.北京市路桥管理养护集团, 北京 100097)
为分析和解决城市交通拥挤问题并提高城市道路利用率提供可行的途径,提出了一种面向交通枢纽的车辆运行仿真方法,通过场景、道路与车辆的三维动态建模,实现交通枢纽交通状况的实时真实感仿真. 首先,提出了基于道路关键点连接网络模型表示交通枢纽的通行道路. 其次,基于粒子系统实现车辆的动态运行实时仿真,并采用基于空间剖分的车辆碰撞检测方法对车辆运动控制算法进行了优化. 最终,通过对路段的动态观测和反馈机制实现车辆行驶路线的规划和调度. 实验结果表明,本文提出的方法可以生动直观地呈现实际路面的交通状况,并且能以较为流畅的帧速率实现交通场景的动态仿真.
虚拟现实; 实时仿真; 道路网络; 车辆控制
2.Beijing Municipal Bridge Maintenance Management Group, Beijing 100097, China)
Abstract: Vehicular traffic simulation is a useful tool for solving the problem of urban traffic jam and improving the utilization of city roads. In this paper, we present a simulation method for modeling the movement of vehicles in a transportation hub, in which the vehicles, roads and other scenarios are rendered by three-dimensional dynamic modeling techniques, and the dynamic traffic condition of a transportation hub is simulated at a real-time frame rate. To achieve realistic simulation, a key point-based road network representation method is firstly proposed to describe vehicular transportation hub. Then a vehicle operation method based on a particle system is applied to obtain real-time simulation, in which a space subdivision-based collision detection method is used to optimize the controlling algorithm of vehicle motion. Finally, a dynamic observation and feedback mechanism is presented to solve the problem of planning and scheduling vehicle routes. The simulation results show that the proposed method can vividly demonstrate the real traffic conditions with a high rending frame rate.
Keywords: virtual reality; real-time simulation; road networks; vehicle controlling
0 引言
随着我国经济实力的快速增强和城市规模的不断扩大,交通运输业在近年来得到了迅速的发展. 信息技术在道路规划、设计、管理等方面的广泛应用成为了交通领域的发展趋势,而虚拟现实技术能提供直观、生动和有效的仿真功能,近年来的应用已证明其非常适用于城市道路交通流的仿真研究,从而为道路交通规划、交通功能分析评价、交通管理决策以及交通安全教育等方面提供重要的参考信息,因此研究道路和车辆的真实感仿真技术,尤其是车辆运行的动态实时仿真技术对于道路交通领域具有重要的理论价值和广泛的应用前景.
由于现代城市快速增长的车流和复杂路况的拓扑结构,城市面临的许多交通问题,如交通拥堵,事故管理,信号控制优化,路网设计和优化等,对传统的交通分析、评价和决策方法提出了极大的挑战. 而虚拟现实技术通过对交通道路和车辆的建模、仿真和身临其境的场景展示,为上述问题的解决提供了良好的可视化工具. 目前,将最新的虚拟现实、计算机图形学和科学可视化技术应用于交通仿真,已经取得的许多研究成果及较为实用的系统,例如道路交通流的仿真、车辆控制运行的模拟以及交通信号的调度等. 但现有的研究成果和应用系统还存在进一步完善和改进的地方,例如在交通仿真中复杂交通道路数据的模型表示问题,车辆动态行为的实时仿真问题,车辆运动控制算法的高复杂度等问题.
针对以上问题,本文研究城市道路交通枢纽及车辆运行仿真问题,在车辆的三维真实感仿真基础上,研究交通枢纽道路网络的表示方法和运行车辆的运动控制方法,实现真实感的交通枢纽运行仿真,直观地展示交通枢纽交通运行的复杂过程. 本文的研究不仅为交通工程研究人员描述复杂道路交通现象,并测试、评价和优化道路交通规划的设计和管理方案,提供一种直观、方便、灵活、有效的分析工具,并且为虚拟现实动态仿真的相关研究提供一种参考解决方案.
1 相关工作
目前,国内外在交通仿真研究方面已经进行了比较成熟的系统性的研究工作,开发了众多的交通仿真软件系统,并且在宏观交通仿真,例如城市交通流仿真以及小尺度和微观交通场景仿真,例如交通场站或车辆运行仿真等方面得到了应用. 下面对目前的交通仿真研究和应用情况进行简单的综述.
在国外,由于发达国家对交通问题的研究起步很早,并凭借其先进的计算机技术,相应的交通道路仿真[1-2]研究也取得了卓有成效的发展,许多技术成果及应用系统在我国也得到了部分的应用,如文献[3]中的用于通行能力评估的技术等. 按照交通道路仿真技术应用的尺度和范围可大体分为宏观和微观2种仿真模型.
宏观仿真模型最初借助计算机技术研究面向交通流量的交通信号控制及优化. 通常将交通流量看作类似液体或气体的连续动态流,例如流行的LWR模型[4]是一种使用一阶第一流体动力学模型偏微分方程的表示方法. 后来,Newell等人[5]对LWR模型进行了扩展,发展了多个变种模型,使其可以适用于更一般的交通情况. 20世纪70年代,佩恩和惠瑟姆提出的PW模型[6]是一种气体状的动态表示方法. Sewall等人[7]提出了一种离散多车道的变道方法,实现了大规模连续交通流的实时三维仿真.
微观仿真模型的发展始于19世纪70年代以后,较早的系统包括1976年英国利兹大学开发的用以平面交叉口交通信号控制的SATURN系统;美国联邦公路局开发的基于应用时间扫描法来描述单个车辆运动的TRAF-NETSIM微观交通仿真模型;Lieferman建立的用于描述单个车辆的运动状态的UTCSI模型. 随着计算机技术的迅速发展,仿真模型的精度得到迅速提高,微观仿真模型出现了许多优秀的系统,其中较为成熟,通用性强且已具有相当商业份额的交通仿真系统有:PARAMICS、CORSIM、NETSIM、VlSSIM、AIMSUN2;另外上世纪80年代中期由Van Aerder教授开发的INTEGRATION;由TRRL开发的TRANSYT;由MIT开发的DYNAMIT等.
与国外相比,由于我国国情的限制,长期以来交通仿真并未引起有关部门的重视. 然而随着智能交通系统(ITS)及其相关技术在世界各国研究的广泛开展,我国交通界认识到在我国开展ITS研究的重要性,而作为ITS技术的重要组成部分的交通仿真技术也受到了极大的关注. 同济大学、浙江大学、清华大学、中国科技大学、山东大学、北京工业大学、中国农业大学等重点院校在交通仿真方面开展了深入的研究工作,并取得了较大的研究进展,其中代表性的研究工作有:同济大学的邹智军等人开发的TJTS[8]系统;同济大学的孙剑等人研究的面向对象微观交通仿真系统[10];浙江大学的王晓薇等人研究开发的城域混合交通流仿真系统及其人机界面设计[9];清华大学的娄明等人研究的基于Java3D技术的虚拟车辆仿真系统[12];中国科技大学的曾建勤等人开发的基于OpenGL的智能三维交通仿真软件[13];山东大学的张立东等人建立的城市交通仿真系统[11];北京工业大学的荣建等人研究的基于GIS的城市快速路交通仿真模型[14];中国农业大学的孙晋文等人研究的基于Agent的智能交通控制策略与可视化动态仿真技术[15]等.
以上国内外研究现状表明,虚拟现实技术在交通仿真方面已经取得了丰富的研究成果,可以较好地为宏观或微观的交通仿真提供有效的技术支撑. 但现有的基于虚拟现实的交通仿真系统在某些方面还存在不完善的地方,例如大多系统对车辆运动的处理过于简单,通常只能模拟简单的交通道路运行场景. 因此,研究符合车辆实际运行规律的车辆动态仿真技术以及复杂交通场景下真实感的交通仿真是下一步的发展方向.
2 交通枢纽仿真总体框架
本文主要创建了一个虚拟的交通枢纽场景,根据北京开阳桥的实际路面情况进行交通规划,着重叙述了交通枢纽的道路模型与车辆运动控制方法. 整个仿真框架主要包括三维建模、场景数据库、道路表示模型、车辆行为和控制模型以及实时渲染5个部分,如图1所示.
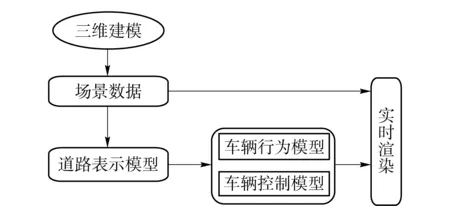
图1 交通枢纽仿真总体框架
三维建模是车辆仿真系统的基础环节,三维建模给场景数据提供场景模型. 关于仿真模型的建立,本文使用3D max软件. 在软件图形用户界面中,使用者可以使用不同的基础设施组件(包括树木、建筑物、交通标志)和交通参与者(包括轿车、卡车、自行车、行人)的模型库建立仿真所需的交通环境. 场景数据库的数据包含道路信息、环境设施等,为交通枢纽仿真提供基础信息.
道路表示模型是车辆仿真系统的关键环节. 如何对交通枢纽的道路信息进行描述是本文解决的首要问题,道路描述方案的好坏直接影响车辆运动控制模型的可扩展性,执行效率以及普适性. 本文采用关键点对道路进行描述,运用有向图来表示道路的组织关系,并利用插值算法生成转弯路径.
车辆行为和控制模型也是车辆仿真系统的关键环节之一. 为了实现车辆在虚拟环境中的运动,本文研究了虚拟现实动画控制方法. 主要从车辆的基本行驶行为、车辆的高级行为以及车辆的碰撞检测3方面进行描述. 车辆的基本行驶行为包括车辆的直线行驶控制和转弯行驶控制. 针对车辆的高级行为,本文主要实现了车辆的并线行为. 在当前车辆由于周围车辆的影响导致车速被降低或为了到达目的地需要换到另一条车道时,当前车辆会执行并线行为. 碰撞检测主要用于对车辆的速度进行控制. 在车辆遇到红灯,前方或周围有车辆,转弯并线的情形下,车辆都要进行碰撞检测.
最后,本文利用OSG图形渲染引擎的回调机制来实现场景内元素的实时渲染. 在每一帧渲染时,场景图形将遍历生成几何体列表,并调用底层API实现场景内几何体的渲染. 场景内的车辆会根据自身的数据以及周围场景的数据“自行”决定下一步的行为.
3 交通枢纽道路表示模型
道路网络是车辆运行的载体,对道路网拓扑关系及道路几何条件的真实描述以及建立扩展性强的道路网络数据结构是进行交通流仿真的基础. 为了实现道路网络的可扩展性,本文交通枢纽的道路表示主要分为场景道路的表示、道路间关系的表示、转弯路径的表示和交通路口桥上路径表示4部分.
3.1 场景道路的表示
由于场景中的单一道路是比较规整的,因此在交通枢纽的三维场景中,每条道路可以用建立关键点来描述. 每条路分为进入十字路口的方向和出十字路口的方向. 对于1条车辆的行驶道路,根据道路中的车辆行驶方向,对道路进行关键点的标定表示,即利用有向图的方式对1条道路的信息进行标定和描述. 车辆从第1个关键点创建,并沿着第1个关键点到第2个关键点的方向行进,直到达到该道路最后一个被标定的关键点.
3.2 道路间关系的表示
1) 道路与十字路口的关系描述
根据道路与十字路口的进出关系,将道路类分为驶入十字路口的道路与驶出十字路口的道路两类. 在本文的方法中,用非负数与负数区分这两个类别的路. 例如:3、4均代表驶入十字路口的道路,-3、-4均代表驶出十字路口的道路. 在图2中共有16条子道路. 通过对道路进行分类,可对道路间的可达性进行描述.
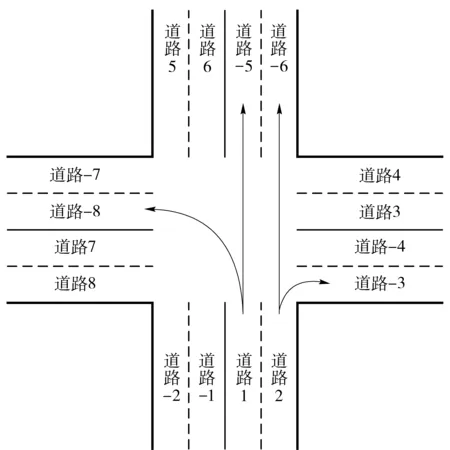
图2 道路间关系示意图
2) 道路间的可达性描述
根据道路间在逻辑上的可达性,将每条道路进行相应的连通. 例如车辆从路1直行可到达路-5,路1中车辆左转可到达路-7. 将这些关系建立起来,构成一个有向图,形成相应的交通道路网(图3).
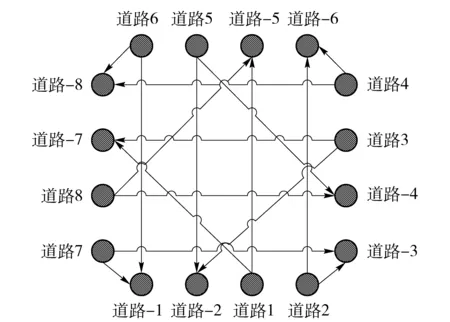
图3 道路构成的有向图
3) 道路间的相邻关系描述
在道路表示模型中,每一条道路分为出入两个方向,每个方向分为两条车道. 关于同一个方向的道路存在多条行驶车道的表示方法,采用对道路进行细分描述,即将网中的每一条道路添加分支来描述相邻道路,以便车辆实现并线、超车等行为.
3.3 转弯路径的表示
在道路关系网中,两条道路的关键点之间的转弯曲线需要定义. 如果对转弯路径仍采取基于关键点的描述方法,不仅需要高精度的标定,而且会极大地增加道路标定的工作量. 如果标定点定义的不够紧凑或者弧度不够精确,会使车辆转弯缺乏真实感(当关键点标定的足够细致时,可以达到较高的真实感). 此外,考虑到仿真系统的普适性,针对不同的交通枢纽可能会存在不同位置和性质的障碍物,会导致关键点标定效率十分低下.
为了解决这个问题,在计算转弯弧度时,本文引入了插值方法来对转弯路径进行生成. 插值算法又称“内插法”,是利用函数在某区间中若干点的函数值,做出适当的特定函数,在这些点上取已知值,在区间的其他点上用这特定函数的值作为函数 的近似值. 采用了贝塞尔曲线的插值方法,对控制多边形的控制顶点进行标定生成相应的转弯曲线,使车辆在行进时可根据该曲线进行行驶.
贝塞尔曲线[16-18],又称贝兹曲线或贝济埃曲线,是应用于二维图形应用程序的数学曲线. 贝塞尔曲线的计算方式有3种:线性公式、二次方公式和三次方公式. 由于三次方公式得到的曲线平滑度最高(见图2转弯路径),所以在转弯控制中,我们用到的是三次方公式. 首先定义4个控制顶点:进十字路口道路的最后一个关键点、出十字路口道路的第一个关键点以及2个控制点. 然后运用式(1)计算得出多个关键点,最后对所有关键点进行标定.
B(t)=(1-t)3×P0+3×t(t-1)2P1+
3×t2×(t-1)P2+t3×P3,t∈[0,1]
(1)
式中:P0、P1、P2、P34个点在平面或在三维空间中定义了三次方贝塞尔曲线. 曲线起始于P0走向P1,并从P2的方向来到P3. 一般不会经过P1或P2,这两个点只是提供方向资讯.P0和P1的间距,决定了曲线在转而趋进之前,走向P2方向的“长度有多长”.
4 基于空间网格的车辆运动控制
4.1 车辆的基本行驶行为
为了实现车辆仿真的实时性,保证车辆在每一帧都能根据场景数据进行实时更新,本文利用OSG图形渲染引擎的回调机制来实现车辆基本行为的控制. 每辆车在初始化时分配其始发道路、目标道路和初始速度. 在每一帧渲染时,车辆根据自身的数据以及周围场景的数据“自行”来决定下一步的行为. 其基本控制内容分为直行行进控制和转弯行进控制.
1) 车辆的直线行进控制
由于道路信息采用关键点的描述方式,因此车辆在直线行驶过程中,只需根据自己的当前速度,从当前所在的关键点沿着当前点到下一个关键点的矢量方向前进,直到达到下一个关键点.
当车辆行驶到第2个关键点时,根据该关键点以及道路描述的状况,来“自行”决策下一步的行为. 例如,如果当前关键点是该道路最后一个关键点,并且这条道路左转连通另一条道路,那么在此决策等待红灯或者左转. 再例如,某车辆在道路2行驶,但需要左转,则自行决策行驶到道路1. 若无指令,则继续保持原来运动状态. 如图4所示,汽车到达P0点后决策是否需要转弯、停止等操作,若决策为直行,则沿着P0到P1的矢量方向前进.
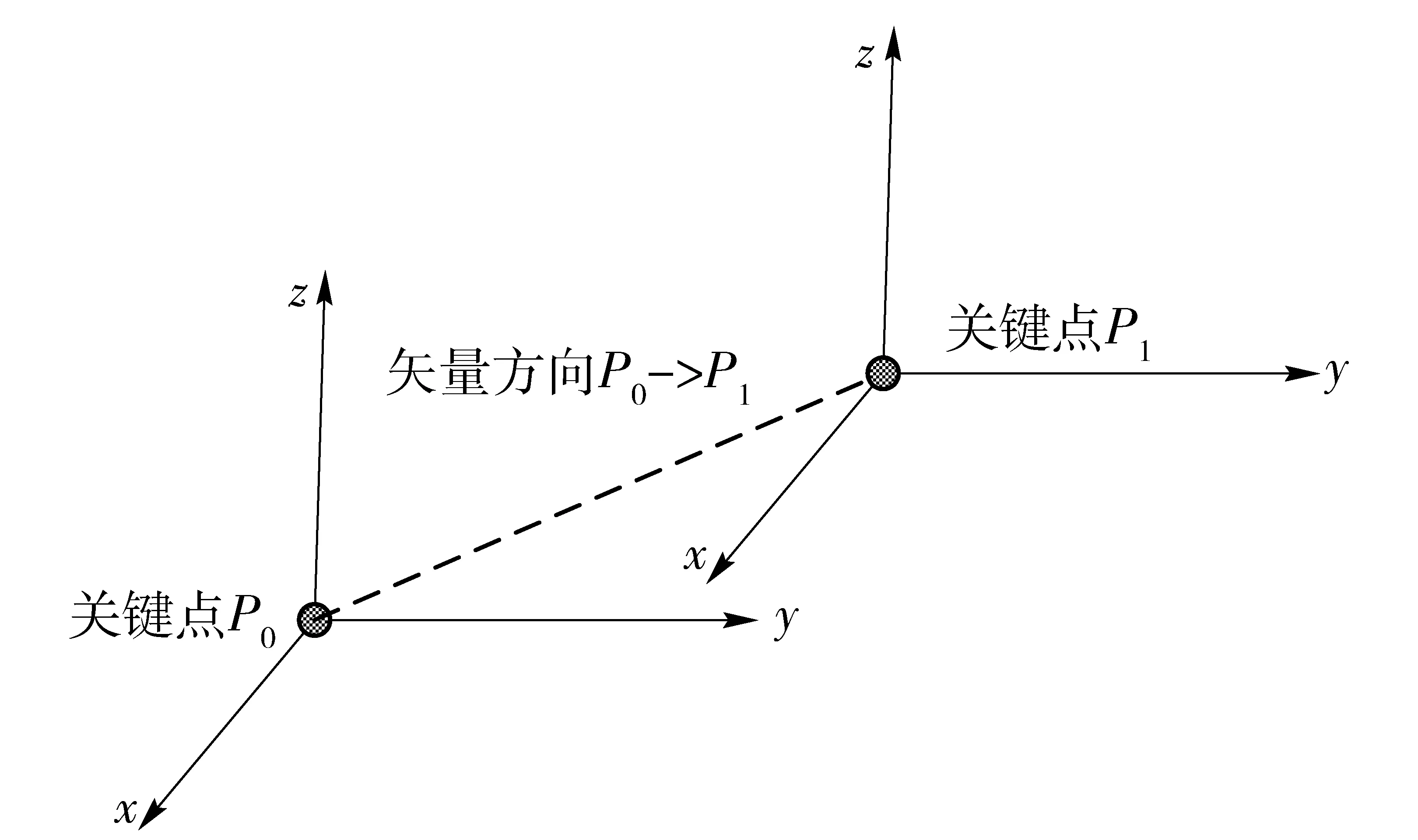
图4 直行关键点示意图
2) 车辆的转弯行进控制
当车辆行驶至当前道路的最后一个关键点时,且当前道路是驶入十字路口的道路,此时车辆会“自行”检查当前路口的红绿灯状态,如果为红灯,则“自行”切换自身状态为等待状态. 如果为绿灯,则根据目标道路选择转弯曲线,并且根据自己的当前速度来控制自身转弯行进,以保证行驶的真实感.
4.2 车辆的复杂行驶行为
上文所述模型保证了车辆的基本行为动作. 针对更复杂的车辆行为,本文实现了车辆的并线行为. 车辆的并线行为在以下2种情形下会被触发:1)如果当前车辆因为周围车辆的影响导致车速被降低,则车辆执行并线行为;2)道路起始端随机产生的车辆,由于到达目的地需要转换到另一条车道,车辆也需要执行并线行为.
当车辆的速度因周围车辆的影响而导致自身速度降低,则该车辆有概率(概率可控,可定义为驾驶员的并线倾向)执行并线判定,如果条件满足可并线行为,则执行并线操作. 其中,如果满足以下条件,则认为当前可以执行并线操作.
1) 概率触发并线行为判定,这种行为视为驾驶员有并线倾向.
2) 当前行驶道路所在分组中存在相邻道路,例如在十字路口,每条进出的道路都划分为两条车道,这种情况下概率选择其中一条进行并线操作.
3) 2)中选中的道路能够保证当前车辆达到.
4) 当前车辆的邻近车辆中不存在行驶车道为2)中选中的车辆.
5) 当前车辆的邻近车辆中不存在正在并线的车辆.
6) 并线的目标道路存在满足条件的关键点使当前车辆能够从当前位置行驶至该关键点.
关键点选择条件为:新生成的方向不能与当前方向是钝角,且新生成方向与当前方向的夹角小于一个阈值,本文暂定45°.
如果以上条件均满足,则判定当前车辆允许执行并线行为,并将当前车辆的状态改为并线状态,车辆开始执行并线移动的操作.
4.3 基于空间剖分的车辆碰撞检测优化算法
为了实现真实的车辆运动仿真,车辆间的碰撞检测必不可少. 例如,在车辆遇到红灯时,前方或周围有车辆时,转弯并线时都要进行碰撞检测. 最简易的避碰策略就是对于某个车辆,将该车辆与当前场景中的所有车辆进行距离判断,当车距小于安全距离,则进行相应的控制行为来避免碰撞. 显而易见,将当前车辆与其他所有车辆进行比较的计算效率低下,时间复杂度达到O(n2). 同时,由于时间代价太大,当车辆规模达到一定程度时,仿真会消耗大量时间,实时性将会无法保证. 因此,设计合理有效的碰撞检测方案,不仅是提高真实感必不可少的内容,也是提高仿真实时性的必要内容.
1) 基于空间剖分的车辆筛选模型
为了高效的获取当前车辆周围的车辆,本文提出了基于空间网格的车辆筛选模型. 根据场景中道路关键点的标定信息,可得当前渲染场景的空间域,然后对空间域进行等间距的网格划分. 如图5所示:目标车辆(黑色标记车辆)原始的检测车辆为圆形区域内的所有车辆(图5(a)). 运用空间剖分的车辆筛选模型后,检测区域为目标车辆的八连通区域,即图5(b)中的矩形标记区域. 从图中可以看出,车辆检测区域变小,碰撞检测计算量将大幅减少.
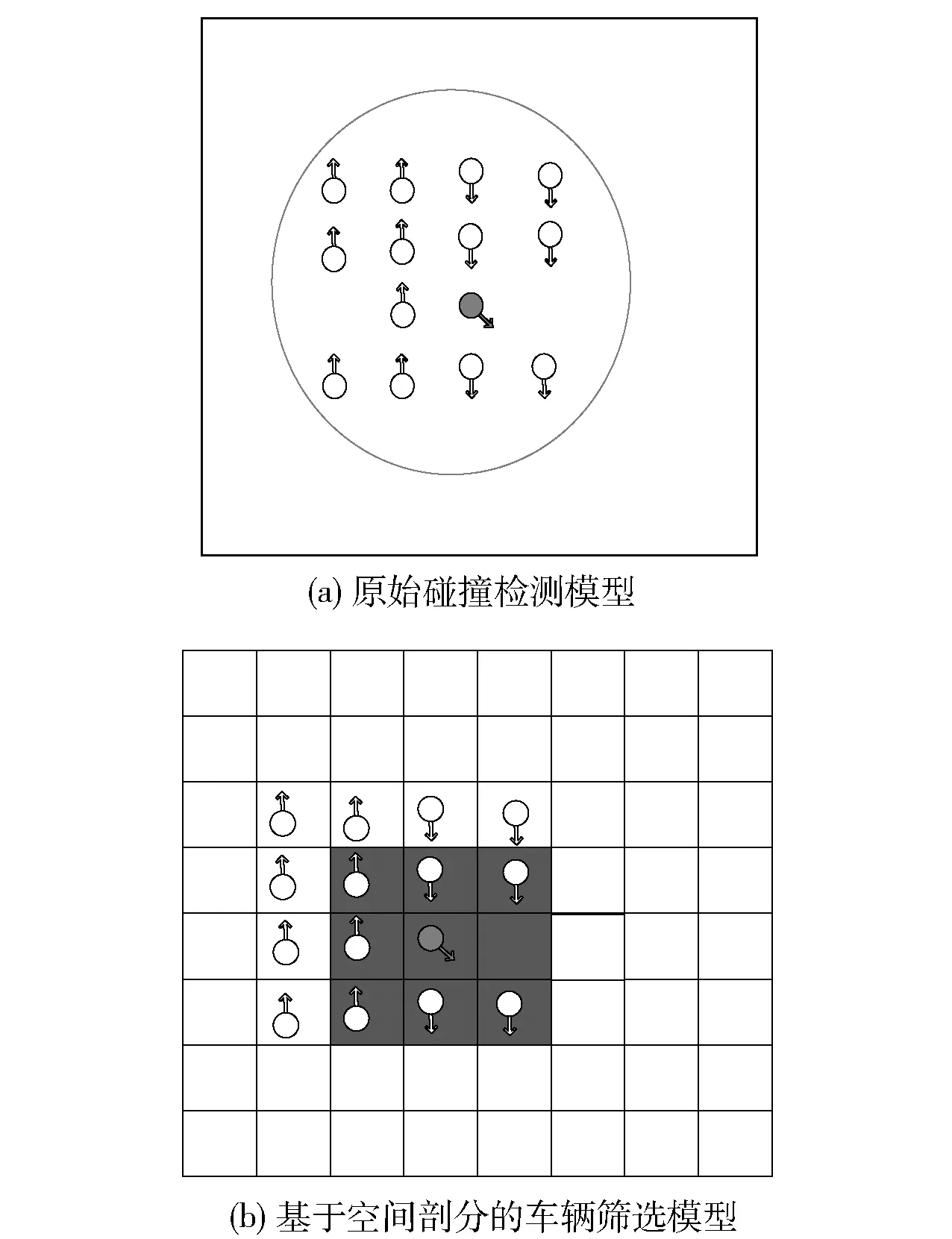
图5 空间剖分示意图
每次车辆在移动时,都会发出相应的消息来更改自己所在的网格坐标,即每个车辆所在的网格单元是唯一的,且是实时更新维护的. 因此,当某个车辆需要获取自身周围车辆时,只需要根据自身所在网格单元的ID即可获得周围网格中的所有车辆对象,以达到车辆筛选的功能.
2) 车辆速度控制模型
通过基于空间剖分的车辆筛选模型筛选车辆后,利用车辆的视线模型来对车辆的速度进行控制,具体步骤如下:当获取到当前车辆周围的车辆对象时,首先做一个初步筛选,将不同方向的车辆进行筛除(不同方向是指在相向的两个车道的车辆). 其次,针对不同的情况,当前车辆可以根据车速控制策略控制其速度的增减,以达到避免碰撞的目的.
本文的车速控制策略如下:当车辆周围无任何车辆,且当前车辆的速度没有超过最大速度,则当前车辆自动以固定增幅提高自身速度,简单地可以设定是所有车速增幅一样(假设为最大速度的10%),此时的车速计算按下式获得:
v=kv0s.t.v0
(2)
式中:v表示车辆下一时刻的速度,v0表示当前车辆的当前行驶速度,MAX_SPEED表示当前车辆可以达到的最大速度,k是车速增加的乘数. 当车辆周围存在其他车辆时,经过判定周围车辆会影响当前车辆的速度,则根据两车之间的距离做出相应决策. 这里影响车速的判定策略是通过车辆的视线模型进行控制. 当车距小于“刹车距离”,速度直接置0. 当车距小于“减速距离”,速度按一定比率降低,直到减到一个最小速度值. 在车辆的速度被降低时,该车成为可并线车辆的候选车辆. 通过上述速度控制策略可以实现对车辆速度的实时控制,具体的计算公式为
(3)
式中:gap表示为当前车辆与前车的距离,SLOW_DISTANCE表示刹车距离,即当前车辆以当前速度开始刹车,且不与前车发生碰撞的安全距离.
车辆的视线模型如图6所示,深色区域表示上节提到的刹车距离,浅色区域表示上节提到的减速区域. 如果当前车辆检测出在自己视线范围内,则根据以上描述来执行相应的行为策略. 其中需要特殊考虑的情况有:若两辆车行驶方向相同,且在不同道路上,即使某辆车在另一辆车的视线范围内,也判定两辆车之间相互无影响. 若两辆车行驶方向不同,且在相同道路上,后车正在处于并线状态,也判定两辆车之间相互无影响.

图6 车辆视线模型
5 实验结果及分析
为了验证本文提出方法在车辆仿真中的效果,本文以北京南站附近的开阳桥为仿真场景,实现了具有较高真实感的交通枢纽仿真系统. 仿真程序实验环境的配置为显卡:NVIDIA GeForce 405,内存:2 GB RAM.
1) 实验效果
图7展示了开阳桥上效果图,从实验效果图可以看出,交通场景效果逼真,车辆行驶路线流畅. 由于桥上一个方向仅设有一条车道,不存在并线操作,所以桥上操作包括直行、加速、减速操作.
图7 桥上交通效果图
图8为车辆基本操作的测试结果. 图中一部分车辆直行,一部分转弯,主要测试了车辆的转弯的效果. 计算转弯路径时利用了插值算法来计算关键点. 测试结果表明,该算法可以良好地表现转弯效果,计算所用时间短,没有产生时间延迟,但由于关键点排布略有一些稀疏,导致流畅程度不如直行流畅. 实验结果表明利用插值算法计算转弯曲线可行并且有效.
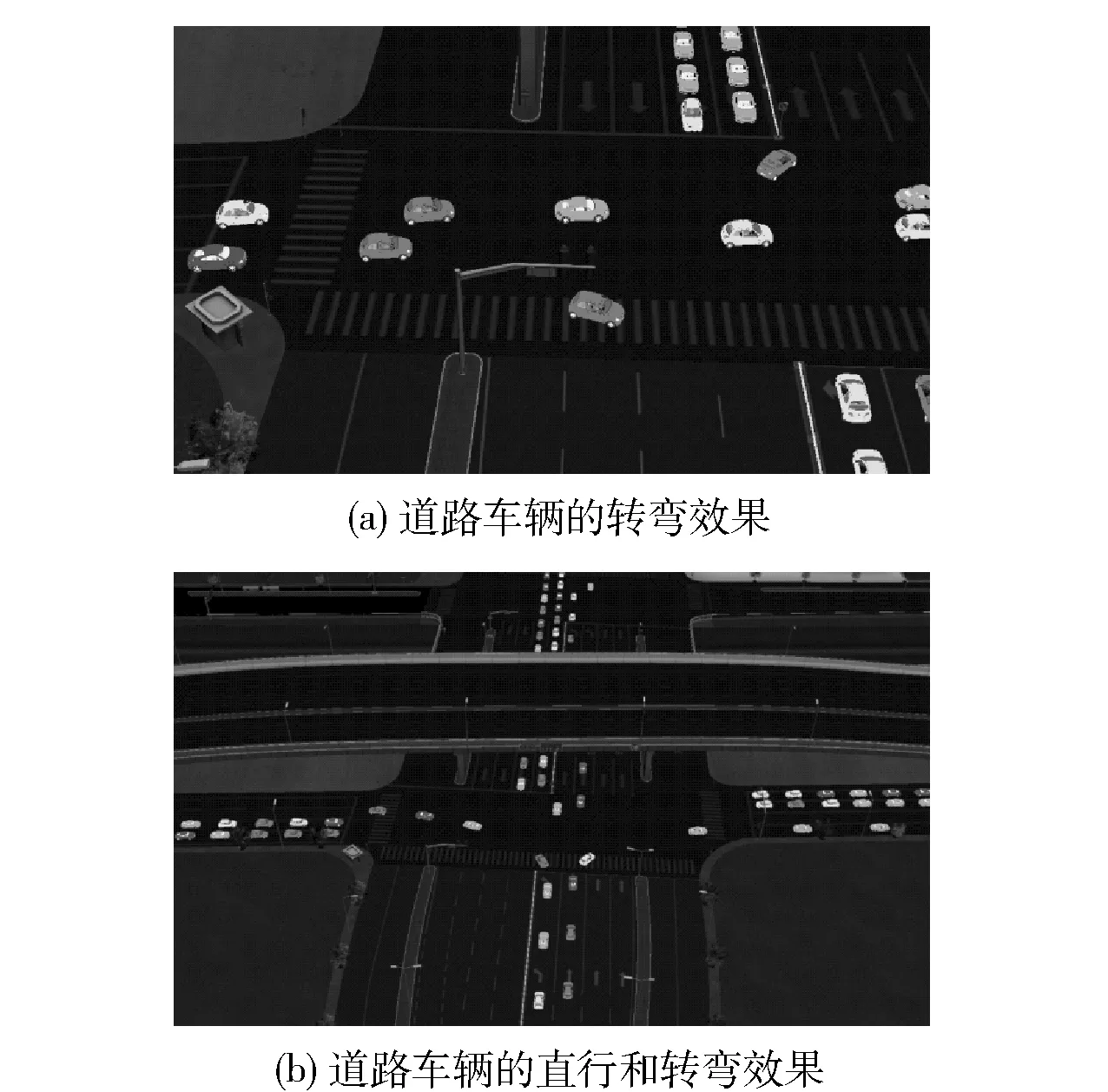
图8 车辆基本操作效果图
图9为并线的测试效果图. 其中车辆1检测到具有可并线的距离,并且没到达最后一个关键点,所以可以选择并线. 车辆2行为同车辆1. 车辆3为已经并线完成的车辆,由于尚未完成全部并线操作,所以车辆方向与行驶方向仍存在角度. 由于车辆4前方的车辆3已经并线,所以车辆4检测到前方碰撞检测区域内无车辆,车辆4进行了加速操作.
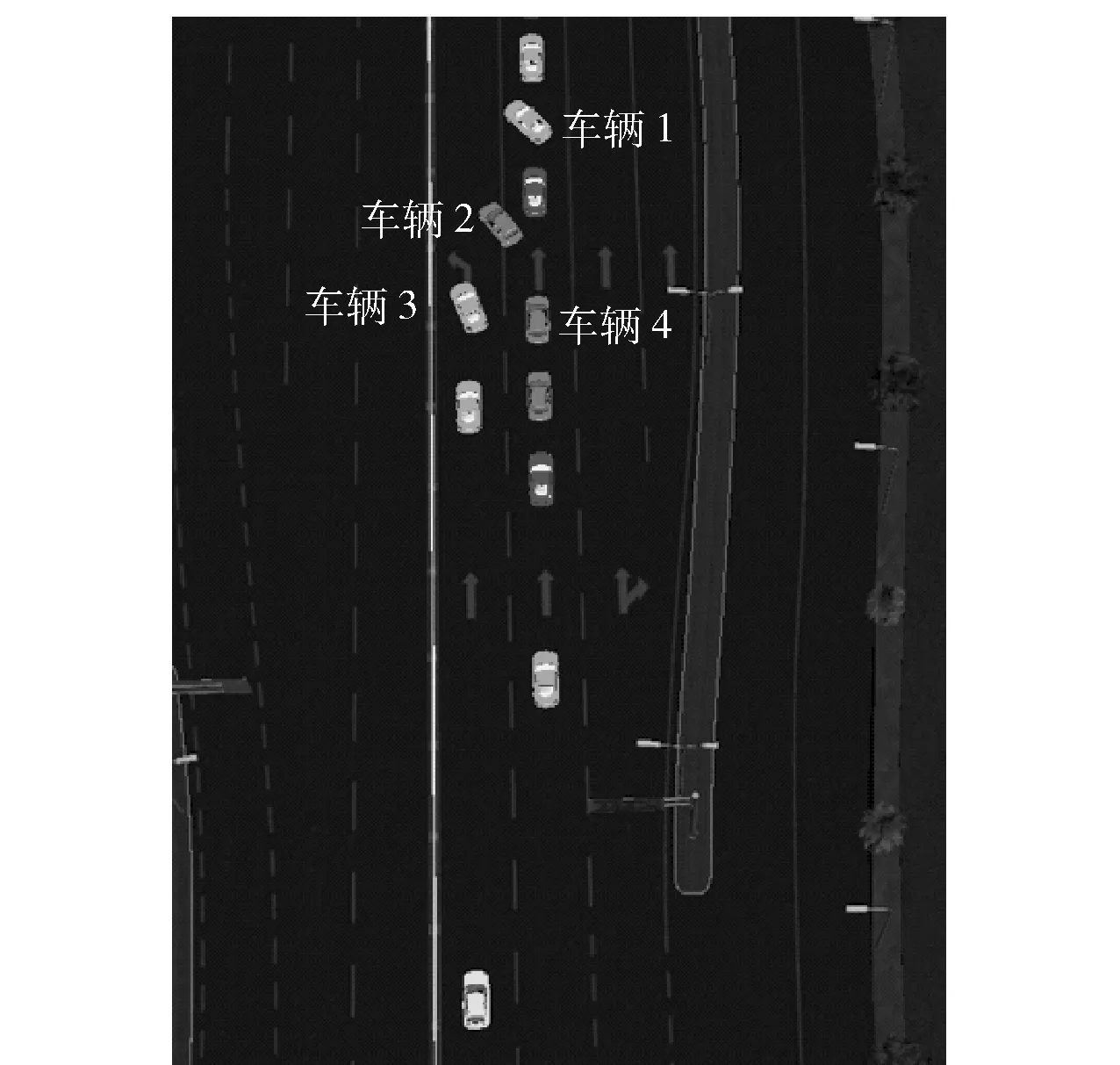
图9 并线效果图
2) 绘制效率
以上效果图表明车辆的运动、转弯和碰撞检测均达到了较高的真实感. 此外,本文对仿真程序中车辆数量和帧率的关系进行了统计,如图10所示. 从图中可以得知在车辆数小于10 900时,平均帧速率可以保证在30帧/s,因此本文的仿真方法具有很高的计算效率.

图10 车辆数量与帧率的关系图
6 结论与将来的工作
本文提出了一种面向交通枢纽的车辆三维真实感实时仿真方法,通过道路关键点网络模型描述通行的道路,基于粒子系统实现车辆的运动仿真,并利用空间剖分法对车辆运动控制的计算效率进行了优化. 以北京开阳桥为实例,对实际路面情况进行交通规划. 实验结果表明,本文的方法可以生动的仿真实际路面交通情况,并且能够保证较为流畅的平均帧速率运行.
本文的方法能够在一定程度上满足车辆三维真实感实时仿真基本要求. 但是,还存在着车辆仿真行为较为简单、车辆种类单一等问题. 在将来的工作中,重点研究以下几个问题:在车辆行为方面,可以增加车辆超车行为,使车辆行为多样化;在运行效率方面,可以基于CPU-GPU异构并行架构对算法进行优化,合理的规划利用计算机的并行处理能力,最终提高仿真效率;另外,考虑在交通场景内加上行人,使路面情况更为复杂,更加真实地模拟实际交通场景.
[1] JAYAKRISHNAN R, Unmesh Rathi, Craig Rindt, Ganesh Vaideeshwaran. Enhancements to a Simulation Framework for Analyzing Urban Traffic Networks with TIWATMS[R]. Final Report, Project MOU-84, 1994.
[2] Sharon Adams Boxill, Lei Yu. An Evaluation of Traffic Simu1ation Models for Supporting ITS Development[R]. SWUTC/00/167602-1, Center for Transportation Training and Research Texas Southern University, 2000.
[3] 荣建, 马建明, 任福田, 刘小明. 利用交通仿真模型求解通行能力[J]. 北京工业大学学报, 2001, 27(1).
[4] LIGHTHILL M J, WHITHAM G B, on kinematic waves. ii. A theory of traffic flow on long crowded roads, Proceedings of the Royal Society of London, Series A, Mathematical and Physical Sciences, 1955, 229: 317-345.
[5] NEWELL G F. A simplified theory of kinematic waves in highway traffic[J]. part 1: general theory, Transportation Research Part B, 1993, 27(4): 281-287.
[6] PAYNE H J, Models of freeway traffic and control[J]. Mathematical Models of Public Systems, 1971, 1(1): 51-61.
[7] SEWALL J, WILKIE D, MERRELL P, et al. Continuum traffic simulation[J], Computer Graphics Forum, 2010, 29(2): 439-448.
[8] 邹智军, 杨东援. 城市道路交通仿真系统软件设计(TJTS)[J]. 交通运输工程学报, 2001, 3(1): 86-88.
[9] 王晓薇, 王慧, 李平. 城域混合交通流仿真系统的人机界面设计实现[J]. 公路, 2004, 5(5).
[10] 孙剑, 杨晓光, 刘好德. 微观交通仿真系统参数校正研究[J]. 系统仿真学报, 2007, 19(1).
[11] 张立东, 贾磊, 赵建玉, 等. 混沌模糊交通控制器的设计[J]. 南京理工大学学报: 自然科学版, 2005, 29.
[12] 娄明, 宋靖雁, 张毅. 基于Java3D技术的虚拟车辆仿真系统[J]. 计算机工程与应用, 2004, 7.
[13] 曾建勤, 王家捷, 张旭东, 等. 基于OpenGL的智能三维交通仿真软件的开发[J]. 计算机仿真, 2005, 22(8).
[14] 荣建, 向怀坤, 冯天科. 基于GIS的城市快速路交通仿真模型研究[J]. 公路交通科技, 2004, 21(2).
[15] 孙晋文. 基于Agent的智能交通控制策略与可视化动态仿真研究[D]. 北京: 中国农业大学, 2001.
[16] Adaptive Subdivision of Bezier Curves[EB/OL]. http:∥www.antigrain.com/research/adaptive-bezier/# toc0003, 2005.
[17] 金廷赞. 计算机图形学[M]. 浙江大学出版社, 1994.
[18] Donald Hearn, Pauline M. 计算机图形学C语言版[M]. 清华大学出版社, 1998.
Real-TimeThree-DimensionalVehicularTrafficSimulationforTransportationHubs
CAI Meng-jia1, MENG Jun2, ZHANG Yong1, HU Yong-li1
(1.Beijing Municipal Key Laboratory of Multimedia and Intelligent Software Technology, College of Metropolitan Transportation, Beijing University of Technology, Beijin 100022, China;
2014- 04-24.
北京市科技计划项目(Z141100006014032).
蔡梦佳(1989—), 女, 硕士研究生, 研究方向为多媒体与人工智能. E-mail: caimj@emails.bjut.edu.cn.
TP 391
A
1008-2522(2014)03-26-08
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
中学生数理化·中考版(2022年12期)2022-02-16
今日农业(2021年8期)2021-11-28
童话世界(2020年32期)2020-12-25
青年歌声(2020年12期)2020-12-23
小学生导刊(2018年16期)2018-07-02
读写算·高年级(2015年1期)2015-07-25
中国卫生(2014年2期)2014-11-12
语文知识(2014年7期)2014-02-28
