
基于可接受间隙理论的交通冲突判别方法研究
2014-02-13 02:10孙小端贺玉龙
交通工程 2014年3期
曹 雨,孙小端,贺玉龙
(北京工业大学城市交通学院,北京 100124)
0 引言
传统的交通安全评价方法都是以交通事故数据为基础进行统计,但事故统计存在“小样本、长周期、大区域、低信度”等缺点,使用起来受到较多限制.目前采用较多的安全评价方法是以交通冲突技术(Traffic Conflict Technique,简称TCT)为手段的间接评价方法.主要过程是首先按照一定的观测方法和判别标准,定量地观测交通冲突的发生过程,并进行一般冲突和严重冲突的判别,判别的结果可应用于安全评价和事故预测.其以“大样本、短周期、小区域、高信度”等优点被广泛应用于交通安全评价和预测中.交通冲突技术能够对调查地点的安全度、安全改善效果等方面进行快速评价,另外还可以根据冲突的严重程度来反映处于交通系统中人的危险感觉[1].目前,世界各国已广泛应用交通冲突技术进行安全评价,并已成为定量研究交通安全问题及安全改善对策的常用方法.
利用交通冲突技术进行安全评价的前提是准确的对交通冲突进行判别,目前已有的方法中一般采用1个或多个指标进行冲突判别,但对于冲突判别的临界值没有统一的标准,多数采用已有的经验值作为临界值,但可能存在与实际情况不相符的问题,造成判别结果不一定准确,这直接影响了安全评价的结果.所以,如何选取恰当的判别指标,并利用合理的方法进行临界值的确定就显得尤为重要.
1 交通冲突技术概述
1.1 交通冲突定义
交通冲突的定义最早是在1977年第1届国际交通冲突技术大会上提出的.定义如下:交通冲突是在可观测的条件下,2个或2个以上道路使用者在空间和时间上相互接近,以致于如果任何一方不改变其行驶轨迹,将会发生碰撞[2].
从交通冲突的定义可以看出,交通冲突与交通事故的前期过程比较相似,交通冲突表示道路使用者双方发生相互作用并改变运动状态,但未引发严重后果;而交通事故则是相同的作用过程,但是引发了碰撞、刮擦等较严重的后果.
1.2 交通冲突技术的有效性
交通冲突技术的有效性研究主要是为了检验交通冲突与交通事故的相关性与相关程度,确定交通冲突能否代替交通事故进行交通安全评价.交通冲突与交通事故的产生原因及前期过程均十分相似,二者的区别仅在于是否引发严重后果,冲突与事故的关系如图1所示.
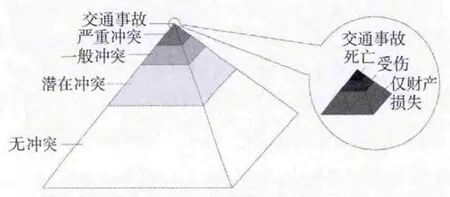
图1 冲突与事故关系
1.3 交通冲突判别方法
在进行交通冲突判别时,通常根据冲突双方的相对位置关系或运动状态进行判定,可以利用距离、速度、时间等指标来判别交通冲突.判别指标可以是一个也可以是多个,但由于目前受到实际观测条件的影响,多以单一指标来判别冲突.常用的交通冲突判别方法有:时间距离法、空间距离法、能量判别法和减速度判别法等.这些方法可用于一般冲突和严重冲突的判别.
1.3.1 时间距离法
国内外目前应用比较广泛的冲突判别方法是时间距离法,即用冲突距离与冲突初速度的比值来衡量交通冲突的严重程度,时间越短代表冲突越严重,当小于某一值时判定为严重冲突.不同国家规定有不同的临界值,美国公路研究所规定临界值为1 s,瑞典为1.5 s.时间距离法的好处是能比较综合地反映出冲突车辆的速度、距离、加速度等运动特性,但有一个局限性就是要确定冲突点,路段确定冲突点较困难,所以更适用于交叉口交通冲突的判别.
1.3.2 空间距离判别法
空间距离法是直接以距离作为判定标准,利用车辆性能计算得到临界刹车距离来判断冲突严重性.这种方法的好处是比较直观,测量也比较方便,缺点也很明显,仅以距离判断冲突容易造成距离小、速度也很小时却被判定为严重冲突.空间距离法判定严重冲突的临界值如表1所示.
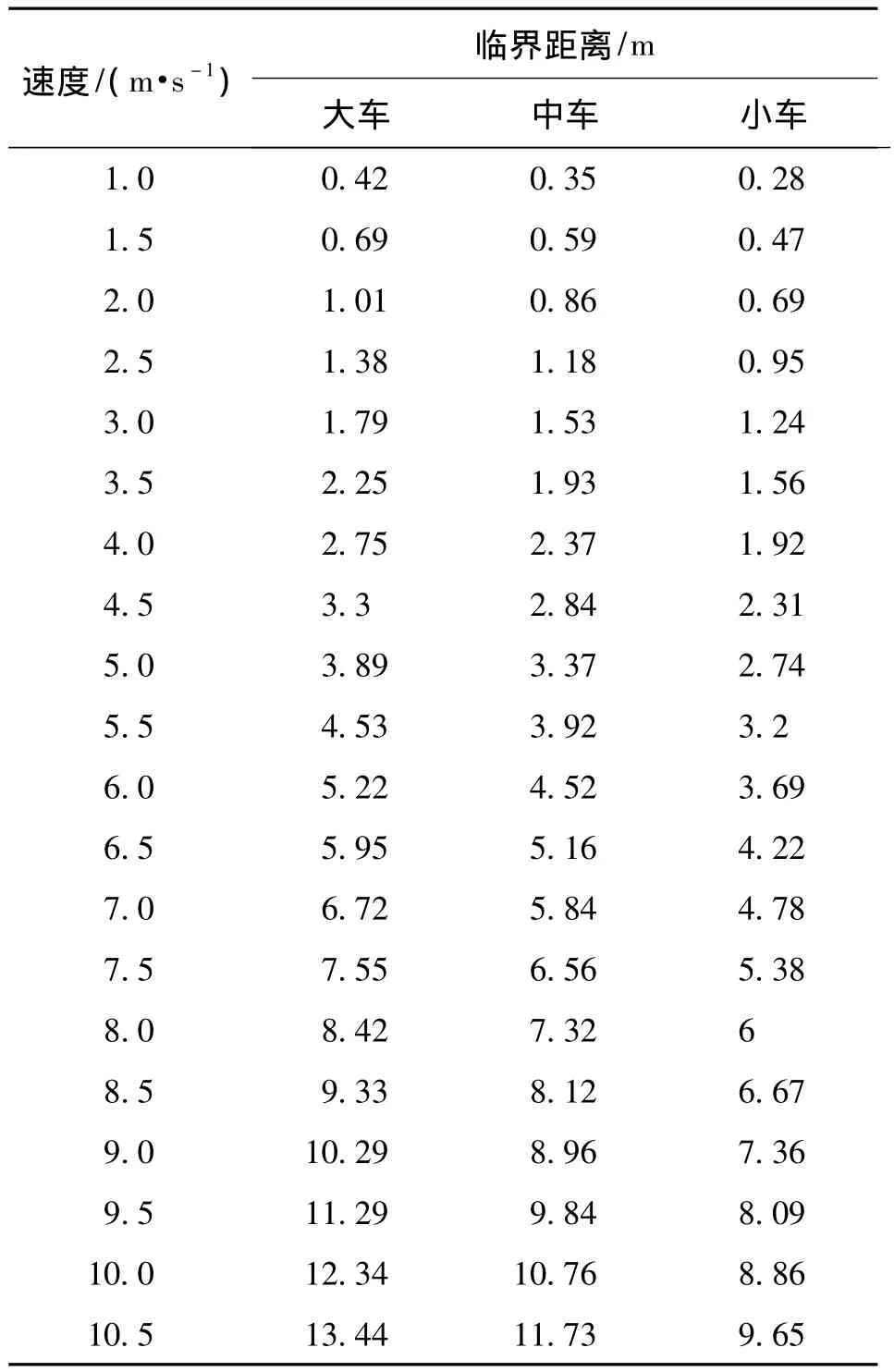
表1 不同车型和速度下的临界距离[3]
1.3.3 能量判别法
能量判别法是根据汽车碰撞理论,通过计算一起冲突如果发展成事故所产生的碰撞能量大小来衡量冲突的破坏性.显然,碰撞能量越大,冲突就越严重反之亦然.
首先作如下假设条件:
1)冲突双方的行驶速度和方向不变;
2)冲突参与者只是一个质点,有质量和运动方向,没有大小、形状;
3)仅仅考虑高速的一方或首先采取避险行为的一方.
冲突能量:冲突车辆在采取避险行为生效的瞬间所具有的破坏性动能,是衡量冲突危险性的重要指标,用Tg表示.不同类型冲突的冲突能量表示方法不同,如式(1)、(2)所示.
正向冲突和追尾冲突

横穿冲突和撞固定物冲突

式中:Tg为冲突能量(N·m);M为冲突车辆的质量(kg);V为冲突速度(m/s);θ为冲突角(°).
冲突损耗:车辆在制动过程中能量的损失,用Tf表示.假定冲突车辆在采取避险行为后,车辆以最大减速度行进直到相撞点,并且能量的损失仅考虑路面摩擦力消耗的能量.冲突损耗的计算式为

式中:Tf为冲突损耗能量(N·m);M为冲突车辆的质量(kg);g为重力加速度,取g=9.8 m/s2;φ为路面摩擦系数,干燥沥青路面摩擦系数取为0.7;Ts为冲突距离(m).
碰撞能量:由冲突能量和冲突损耗可以定义碰撞能量(TDE),即冲突车辆在到达相撞点时所具有的破坏性能量.根据TDE的大小来判断冲突的危险程度.TDE的计算式为

事故后果的程度受很多因素的影响,其中主要有碰撞速度和角度、碰撞位置、车辆种类与质量以及道路条件.不同的碰撞条件给车辆或其他物体所造成的损失是不一样的,能量判别法体现了主要影响因素的作用,但是判别标准较难统一,各类车型质量不一,且与非机动车、行人等之间差异较大.还存在质量大、速度小或是质量小、速度大却得出严重冲突的判别结果.
1.3.4 减速度判别法
近年来,随着冲突数据检测技术的发展,出现了以减速度为判定指标的交通冲突判定方法,减速度判定法有其明显的优势.因为减速度的大小直观地反映了车辆速度变化的缓急程度,从而从一个侧面反映了驾驶员对现场环境的主观判断.而且可以获得减速度的变化过程,可以清楚直观地了解到车辆运行速度变化的规律.车辆在发生冲突导致运动状态改变时,通常都会发生减速过程,而车辆在减速过程中,速度逐渐下降,而减速度则是先增大再减小的过程,也就是存在最大减速度值,这个值即反映了车辆速度改变最大的状态,所以可以用最大减速度来作为判别冲突和严重冲突的指标.
车辆在制动过程中的减速度比较直接地反映了驾驶车辆的驾驶员在发生冲突时的心理状况,驾驶员认为事件越紧急越容易猛踩刹车,减速度也越大,所以将减速度作为交通冲突严重性的判别指标,很大程度上考虑了驾驶员的主观感受,比较符合交通冲突的定义和本质.不同加(减)速度下驾驶员在不同减速度下的反应如表1~2所示.
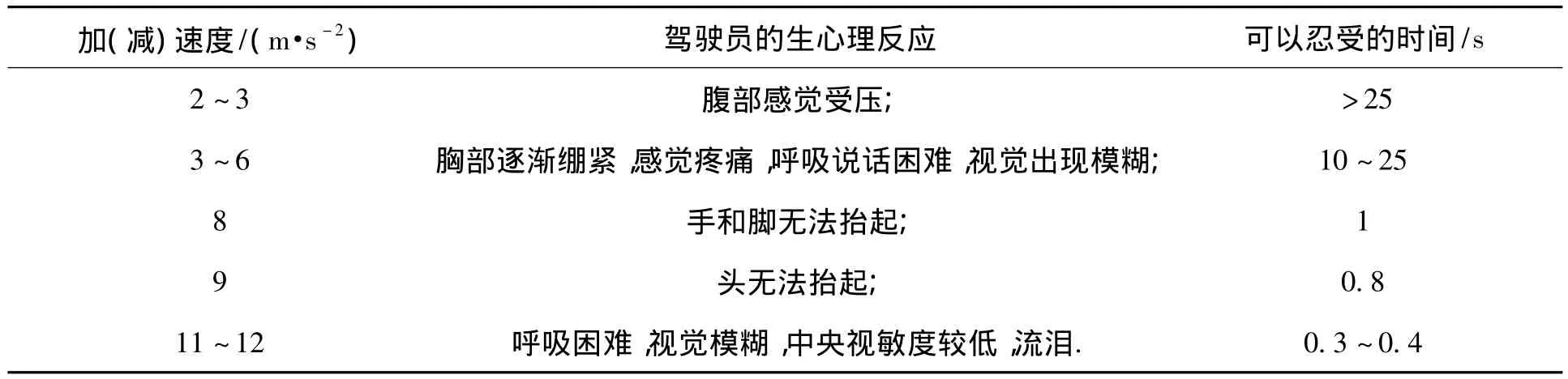
表2 驾驶员在不同加(减)速度下的反应[4]
由表2可知,加(减)速度大于2 m/s2时,驾驶员就会感觉不适,大于3 m/s2不适地感觉就会加重,有学者根据上表的反应规律制定了以减速度为判别指标的判别方法,如表3所示.
将国内外学者近年来进行冲突判别时采用的判别指标进行总结,如表4所示.
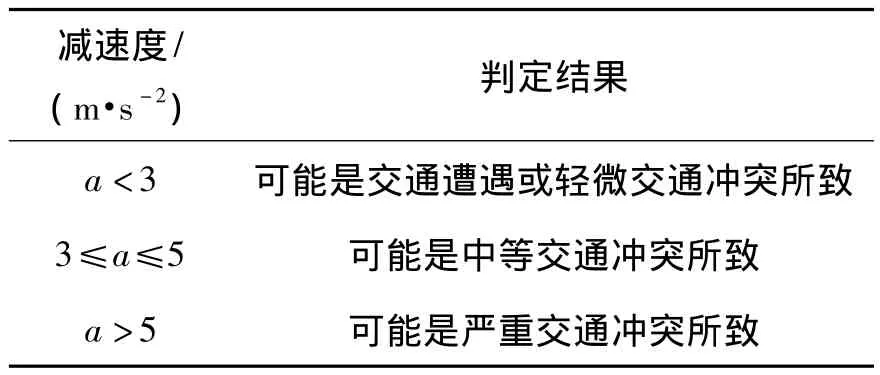
表3 以减速度法判别冲突与严重冲突临界值[4]
如表4所示,2006年以前,交通冲突判别指标以冲突距离为主,主要原因是冲突检测水平有限,还无法精确获取机动车的运动状态,只能通过估测冲突距离来判别交通冲突.2008年以后,冲突判别指标逐渐转向冲突时间、减速度等较难获取的指标,并且越来越倾向于多指标综合判别.由表4可以看出,减速度作为交通冲突的判别指标正成为一种趋势.本文即采用减速度判别法对冲突进行判别,利用先进的视频图像分析软件进行运动状态获取.
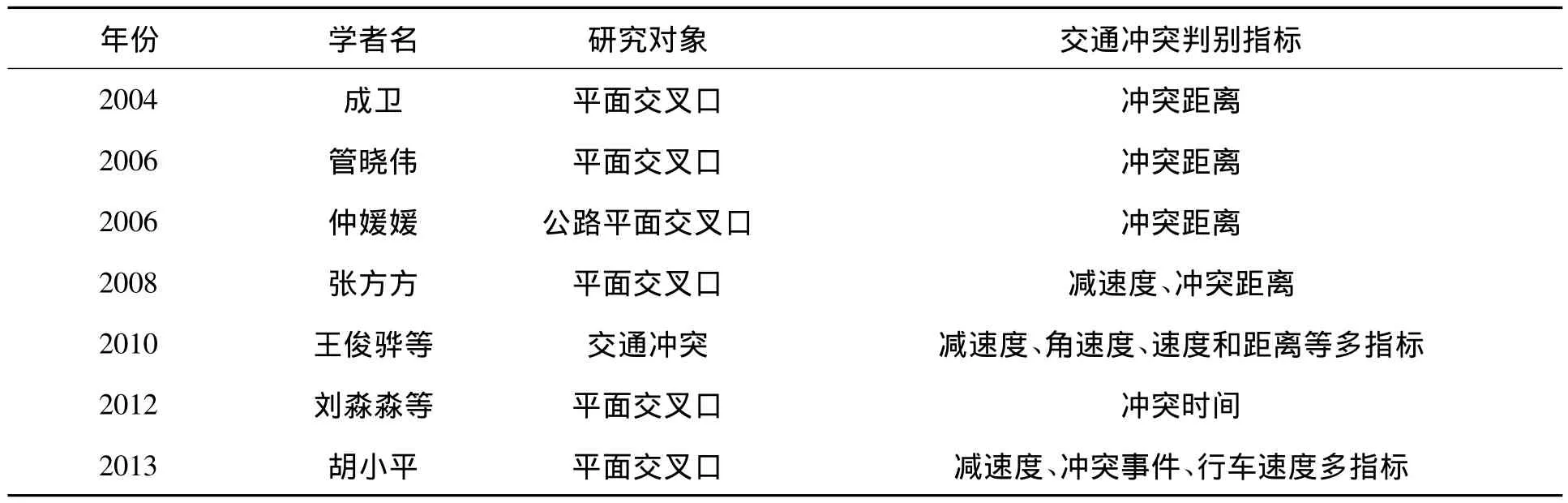
表4 交通冲突判别指标对比[4-10]
2 研究对象确定及数据获取
2.1 研究对象
本文以信号交叉口行人与右转车的冲突为研究对象进行交通冲突判别方法的研究,因为行人与右转车的冲突是交叉口普遍存在的冲突形式.行人与右转车发生冲突时主要存在3种情况:
1)行人与右转车发生明显冲突现象.如行人在小于可接受间隙的情况下强行过街,迫使右转车减速避让,引起冲突.
2)行人与右转车距离较远,行人过街时大于行人可接受间隙,行人顺利过街;车辆在右转时没有行人或其他车辆干扰,顺利右转,此时未发生冲突.
3)行人发现无法穿越而在路边等待过街,右转车通过冲突点时会受到行人的影响,属于干扰过街,根据车辆的减速特征分为冲突与未冲突.
由于右转车转弯时的速度较低,而且存在正常的减速,所以行人与右转车很难发生严重冲突.本文主要对第3种情况进行发生冲突与未发生冲突的判定.
2.2 数据获取
本文选取典型信号交叉口进行行人与右转车运动状态的获取.采集上述3种情况下行人与右转车速度和加速度的变化,记录行人与右转车相互作用过程中行人通过冲突点的情况,根据行人通过冲突点与未通过冲突点2种情况进行数据分析,即可得到冲突判别的临界值.
为方便统计,将交叉口各冲突点进行编号,信号交叉口行人与右转车存在4个冲突区域,分别编号为1、2、3、4,每个区域内实际存在2个冲突点,但是2个冲突点由于相位设置的不同不会同时出现,所以放在一起考虑,具体情况如图2所示.
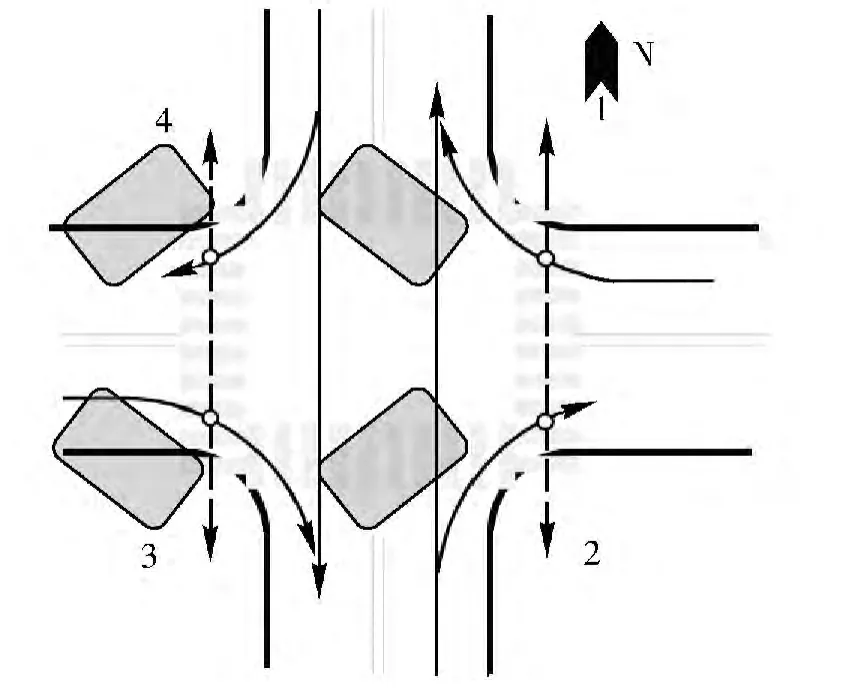
图2 行人与右转车冲突区域划分
交通冲突的调查方法分为人工调查法和视频调查法.近年来,由于视频技术的不断发展,采用视频调查法逐渐成为冲突调查的趋势,所以本文亦采用视频调查法进行冲突的调查,利用运动分析软件即可提取需要的信息.
考虑早晚高峰和平峰时段行人与右转车交通特性的不同,选取早高峰8:00—9:00、平峰14:00—15:00和晚高峰17:00—18:00各1 h进行行人和右转车交通状态的提取.
2.2.2 数据采集情况
利用SIMI Motion运动分析软件对拍摄的视频文件进行冲突数据的采集,该软件是由德国SIMI公司在1992年开发的,可用于体育运动分析、教学、康复医学等领域.SIMI软件特点为:能精确地捕捉物体的运动状态,能自动计算出速度、加速度等数据,能对结果进行修正和拟合,剔除异常点.软件最小统计间隔为0.02 s.数据形式如图3所示.
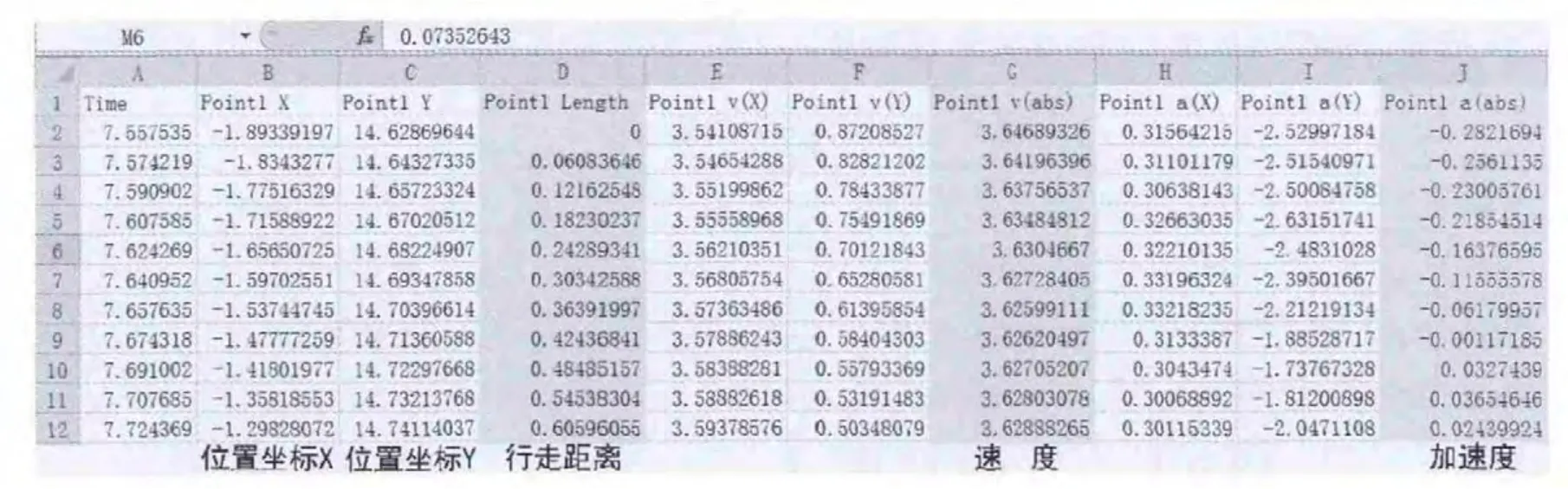
图3 原始数据形式
利用SIMI软件进行行人与右转车数据统计方法如下:
1)统计所有明显发生冲突的行人与右转车辆的运动状态,并记录冲突发生地点、时间以及在发生冲突过程中行人通过冲突点的情况,即通过冲突点还是未通过冲突点.
2)统计部分未发生冲突的行人与右转车的运动状态,了解正常情况下行人与右转车的运动状态,并同样记录行人通过状态.
施工建设阶段资金补偿并不适用于各种施工建设的项目,而是适用于建设需要资金较大的项目,通常这种项目的范围很小,共分为两种:一是项目付出的成本与项目的运营效率联系十分密切的项目,通常表现为经营性的项目;二是建设的永久性设施,通常表现为政府为了提高居民的生活品质而出资建设的基础性设施。在项目施工阶段,政府会将建成的部分项目交与社会企业经营,并签订相应的合同,使企业能够获得相应的经济效益,待项目正式运营以后,政府会对资产形式进行调整,以此来获取收益。
3)统计所有发生第3种情况的行人与右转车运动状态,同样记录行人通过情况.我们的重点就是要区分第3种情况,将第3种情况中发生冲突的数据提取出来.
经过SIMI软件提取的行人与机动车运动状态数据的基本情况如表5所示.

表5 软件提取数据基本情况
利用SIMI软件共提取了628组行人与机动车的运动状态数据,先对这些数据进行初步分析,了解不同情况下行人与机动车的运动状态特点,之后对干扰情况下的冲突进行判别.
3 临界值的确定
3.1 右转车减速度变化分析
选取右转车经过冲突点过程中的部分样本进行统计,分析右转车加(减)速度的变化规律,得到图4.
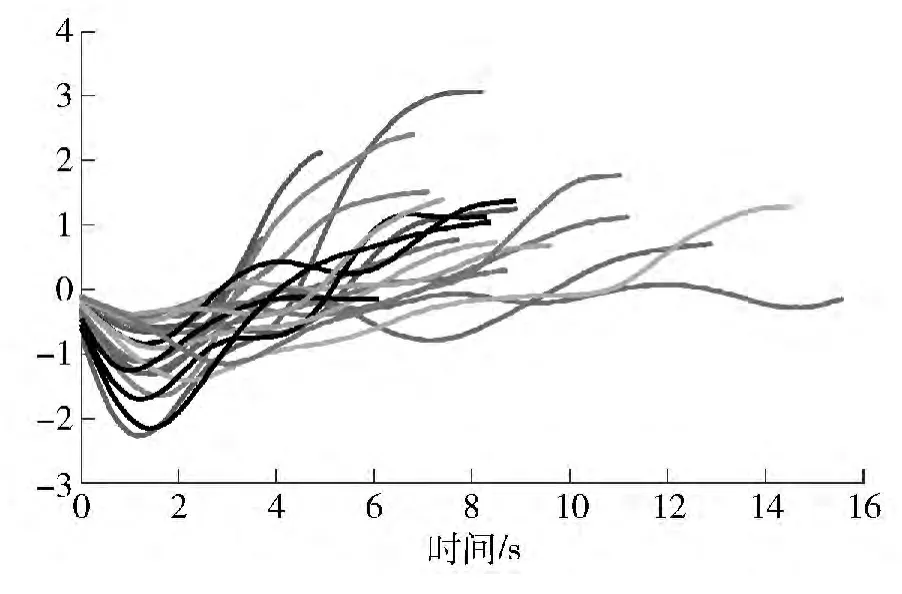
图4 发生冲突的右转车加(减)速度变化曲线
由图4可看出,右转车在与行人发生冲突时会 先减速,减速度逐渐增加,在到达某一最大值后逐渐减小,到减速度变为零时速度值达到最小,之后车辆可能加速也可能继续减速.本文即选取右转车在减速过程中的最大减速度值作为冲突判别的依据,并对临界值进行标定.
3.2 冲突临界值的确定
由于右转车所能达到的最大减速度值较小,所以利用已有的判别准则无法对行人与右转车的冲突进行判定,需利用其他方法进行临界值的确定,所以本文采用交通流理论中可接受间隙理论的有关方法来确定减速度的临界值.
M.A.Raff[11]在研究交叉口和高速公路匝道等的可穿越间隙分布时提出了临界间隙法理论,即用可接受间隙的数值曲线和不接受间隙的数值曲线分别做图,一条曲线是接受的间隙值分布曲线,一条是不接受或被拒绝的间隙值分布曲线,这2条曲线的交点,称为“临界时隙”,如图5所示.
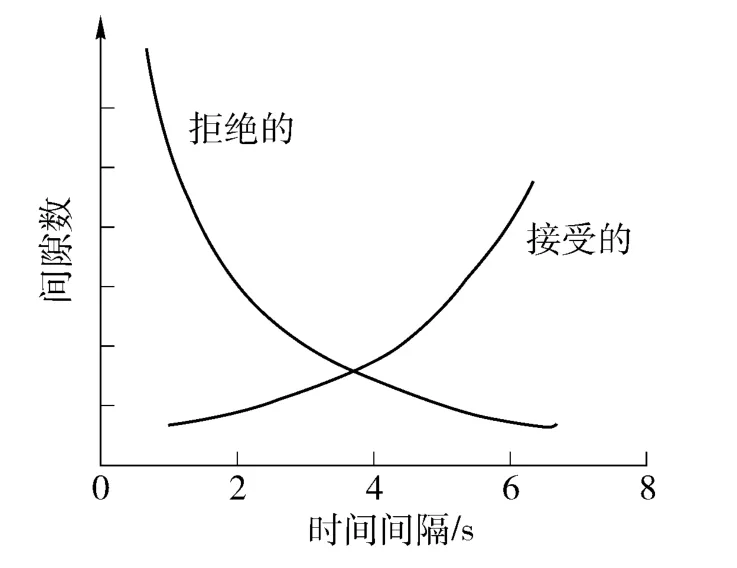
图5 Raff的临界间隙法[11]
在工程技术领域,临界间隙法已广泛应用于最小可接受间隙值的确定中.通常采用现场调查的方式,将穿越主路车流和等待穿越主路车流的车头时距都记录下来,将2种车头时距分别进行统计,得到2条曲线,分别表征接受与未接受的时间间隙分布情况,2条曲线的交点即认为是可接受间隙的临界值.已有学者将临界间隙法用在确定交通冲突判定指标边界值的标定中,并取得了较好的效果.
本文即用此方法来标定减速度判别交通冲突的临界值.将前文记录的所有行人通过与行人未通过冲突点的数据进行汇总,统计2种情况下车辆最大减速度的分布情况,以0.1 s为最小统计间隔,绘制两者减速度频率分布图,并用线性回归方法拟合曲线,最终得到图6所示结果.
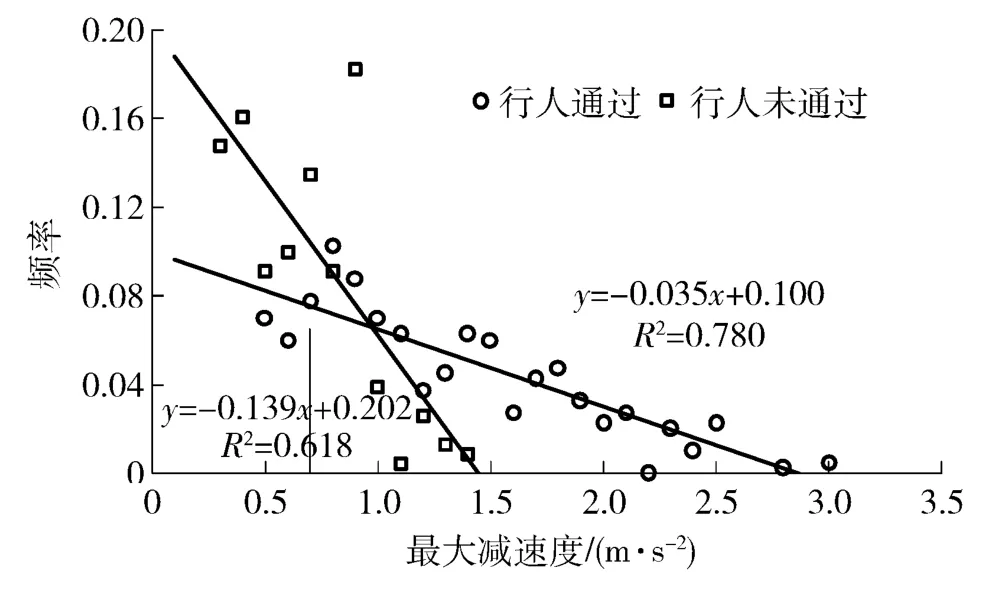
图6 临界间隙法确定减速度冲突判定临界值
图6所示,两直线的相关系数分别为0.6181和0.780 7,直线交点对应的减速度值大小为1.0 m/s2.考虑车辆正常右转时也会有正常的减速,最大减速度值为0.5 m/s2左右,所以,将最大加速度小于0.5 m/s2的车辆判定为正常右转车辆,将0.5~1.0 m/s2之间的数据判定为有干扰右转但不发生冲突.基于上述分析,得到本文对行人与右转车发生冲突时的判别标准如表5所示.
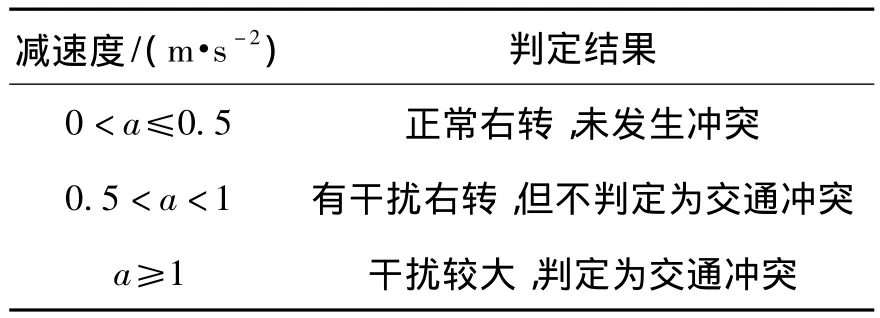
表5 减速度判别冲突的指标临界值
通过上述方法,就可以将干扰情况进行区分.当车辆减速度小于1 m/s2时,认为减速不明显,不属于交通冲突.减速度大于等于1 m/s2的情况判定为一次冲突.
3.3 交通冲突判别结果
临界值确定以后,对采集到的明显冲突样本和干扰情况样本重新进行判定,得到行人与右转车在不同冲突区域的交通冲突发生情况,剔除不属于冲突的减速度,得到最终的冲突判别结果如表6所示.
根据提出的判定标准,将发生干扰情况下的432个样本重新进行判定,剔除了120个减速度小于1 m/s2的干扰数据,加上已得到的91个冲突样本,得到表6中共403个交通冲突样本数据.
4 结论
总结了国内外关于交通冲突技术的研究现状,介绍了交通冲突判别的常用方法.通过分析近几年国内外进行冲突判定时的指标选择规律,选取减速度作为信号交叉口行人与右转车交通冲突的判别指标,利用可接受间隙理论的临界间隙法对减速度的临界值进行标定,利用行人通过与未通过冲突点为区分标志绘制2条减速度分布曲线,曲线交点对应的减速度值即为减速度判别冲突的临界值,大小为1 m/s2.用所建立的判定标准对干扰情况下的车辆数据进行判定,判别出属于交通冲突的样本,加上已经得到的明显发生冲突的数据,得到交叉口各冲突区域的行人右转车冲突数分布情况,利用得到的冲突数据即可对交叉口行人右转车安全进行评价.
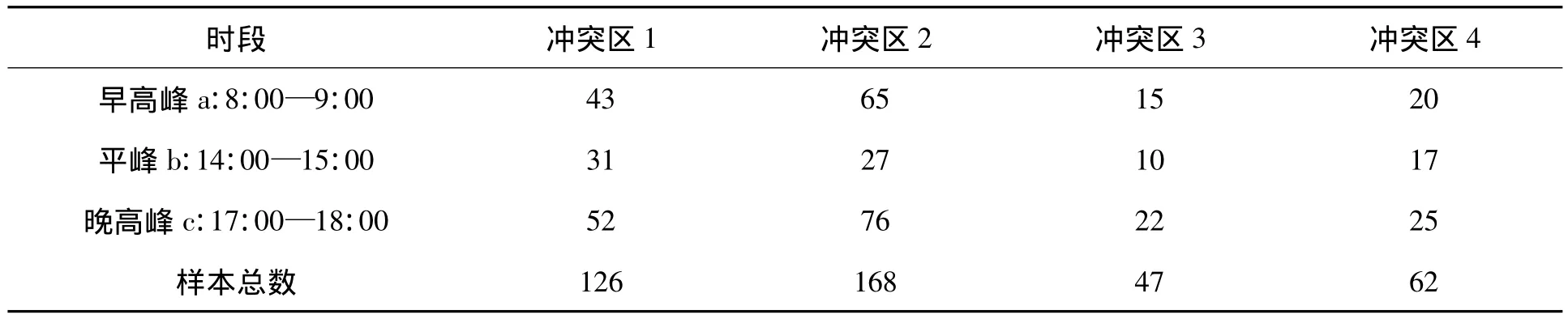
表6 剔除非冲突数据后最终的冲突判别结果
[1]SHOUKATLYAZ.Validation and improvement of rear-end traffic conflict model for safety evaluation of coordinated signal systems[D].King Fahd University,Requirement for the Degree of Master of Science in Civil Engineering.3,1997.
[2]OLDER S J,SHIPPY J.Proceedings of the Second International Traffic Conflict Workshop[C].1979.
[3]刘小明,段海林.平面交叉口交通冲突技术标准化研究[J].公路交通科技,1997,14(3):29-34.
[4]胡小平.基于视频的交叉口交通冲突检测与判定[D].北京:北方工业大学,2013.
[5]成卫,同强,李江.道路交叉口交通冲突灰色评价研究[J].公路交通科技,2004,21(6):97-100.
[6]管晓伟.基于交通冲突技术的平面交叉口安全评价研究[D].北京:北京交通大学,2006.
[7]仲媛媛.基于交通冲突的公路平面交叉口模糊安全评价研究[D].哈尔滨:哈尔滨工业大学,2006.
[8]张方方.基于视频的平面交叉口机动车交通冲突检测技术研究[D].上海:同济大学,2008.
[9]王俊骅,张方方,张兰芳.基于OpenCV和Halcon的交通冲突视频自动检测及数据处理[J].同济大学学报:自然科学版,2010,38(2):238-244.
[10]刘淼淼,鲁光泉,王云鹏,等.交叉口交通冲突严重程度量化方法[J].交通运输工程学报,2012,12(3):120-126.
[11]李德慧.快速路交通流中驾驶特性差异研究与仿真[D].北京:北京工业大学,2008.
猜你喜欢
现代营销·信息版(2020年2期)2020-02-14
小学教学参考(语文)(2019年5期)2019-06-24
科技创新导报(2019年6期)2019-06-11
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
北京教育·高教版(2016年12期)2017-01-10
特别文摘(2016年13期)2016-08-23
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
河南科技(2014年14期)2014-02-27
环球时报(2009-09-28)2009-09-28
