提高平行式停车效率的泊位施划方法研究
2014-08-11 08:45:37关宏志从骁宇
交通工程 2014年3期
苏 晴, 关宏志, 从骁宇
(1.北京工业大学 城市交通学院, 北京 100124; 2.北京工业大学 建筑工程学院, 北京 100124;3.北京工业大学 环境与能源工程学院, 北京 100124)
提高平行式停车效率的泊位施划方法研究
苏 晴1, 关宏志2, 从骁宇3
(1.北京工业大学 城市交通学院, 北京 100124; 2.北京工业大学 建筑工程学院, 北京 100124;3.北京工业大学 环境与能源工程学院, 北京 100124)
为了提高平行式泊车效率、节能减排、规范停车秩序,本研究在现有路侧平行式停车泊位施划方法的基础上,建立了机动车“一把轮”平行式泊车轨迹的数学模型,并利用该数学模型及MATLAB软件对多种车型进行了平行式泊车过程的仿真,从而得到了停车区域、共用区域、引导线的位置和尺寸等参数,提出了新型平行式停车泊位施划的方法;设置了共用区域,缩短单个停车区域长度;并将理论计算的结果与实际相结合,进行了实车试验;本研究提出的路侧平行式停车泊位施划方法的优化方案,不仅可以节省停车场占地面积,还能降低驾驶员泊车难度,降低了能源消耗、减少了污染排放,并在一定程度上节省了泊车所需时间,使路侧平行式泊车更加方便高效.
交通工程; 路侧平行式泊车; 停车位施划; 轨迹仿真; 引导线
Abstract: This paper intends to standardize the design of parallel parking to improve the efficiency of parallel parking, conserve energy, and reduce vehicle emission. This research, based on the existing roadside parallel parking delimitation method, establishes a mathematical model of “a step” parallel parking trajectory of motor vehicles, and simulates parallel parking processes for different models of passenger cars using the mathematical model and MATLAB,. Then the parameters are obtained, such as the positions and sizes of the parking areas, the shareable areas, the guide lines and so on. The research has designed a delimitation method of the new parallel parking garages, set the shareable areas, reduced the size of every single parking area, and carried out the real vehicle tests by combining the results of the theoretical calculation. The roadside parallel parking facilities planning optimization scheme method that has been proposed not only can save the parking area, but also decrease the parking difficulty for drivers, reduce energy consumption and pollution emissions. And to a certain extent, it can save the parking time as well. Based on the results, the proposed layout of roadside parallel parking is more convenient and efficient.
Keywords: traffic engineering; roadside parallel parking; parking spaces delimitation; trajectory simulation; guide lines
近年来,随着我国经济的快速发展,机动车保有量也迅速增长. 截至2012年底,全国机动车保有量已达2.4亿辆[1],城市“停车难”的问题日趋严重. 统计结果表明,2012年北京市机动车保有量已经超过520万辆[2],而全市的备案停车位162万余个[3],停车矛盾之突出,可见一斑.
众所周知,停车泊位的施划方法,有平行式、斜列式及垂直式等[4](如图1所示). 而在路侧停车中,平行式泊车的方式最为常见. 由于在平行式泊车过程中,驾驶员需要根据车辆所在位置,多次调整才能准确入位,导致停车过程中能源消耗和环境污染,并且在泊车过程中很容易出现车辆刮蹭及停车秩序混乱等问题. 其次,由于平行式停车需要的空间较大[5],现在停车泊位施划方法,容易造成土地利用效率过低等问题.
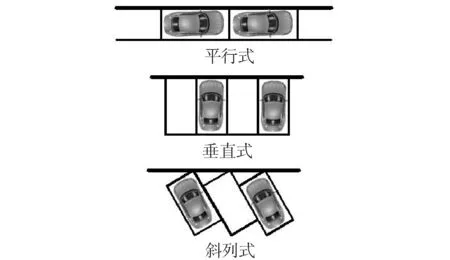
图1 3种主要停车泊位施划方法
为了解决平行式泊车车辆入位难的问题,一些汽车生产厂商开发了自动泊车辅助系统,利用该系统,车辆可以自动泊车入位. 该项技术虽然已经趋于成熟,但目前只适用于部分高档车型,对于绝大多数的在用中低档小汽车及在用车辆来说,仍然是远水不解近渴.
针对以上问题和目前国内外的研究现状,本研究从多个角度,提出了一种名为“一把轮”的平行式停车泊位的施划方法. 该方法通过改进现有平行式停车泊位的施划,并在停车泊位区域内设立共用区域和引导线,来降低平行式泊车的难度,使驾驶员安全便捷地泊车,最终达到提高土地利用效率、减少车辆剐蹭等事故的发生、节能环保及规范停车秩序的目的.
1 研究基础
研究的车辆模型[6]如图2所示.
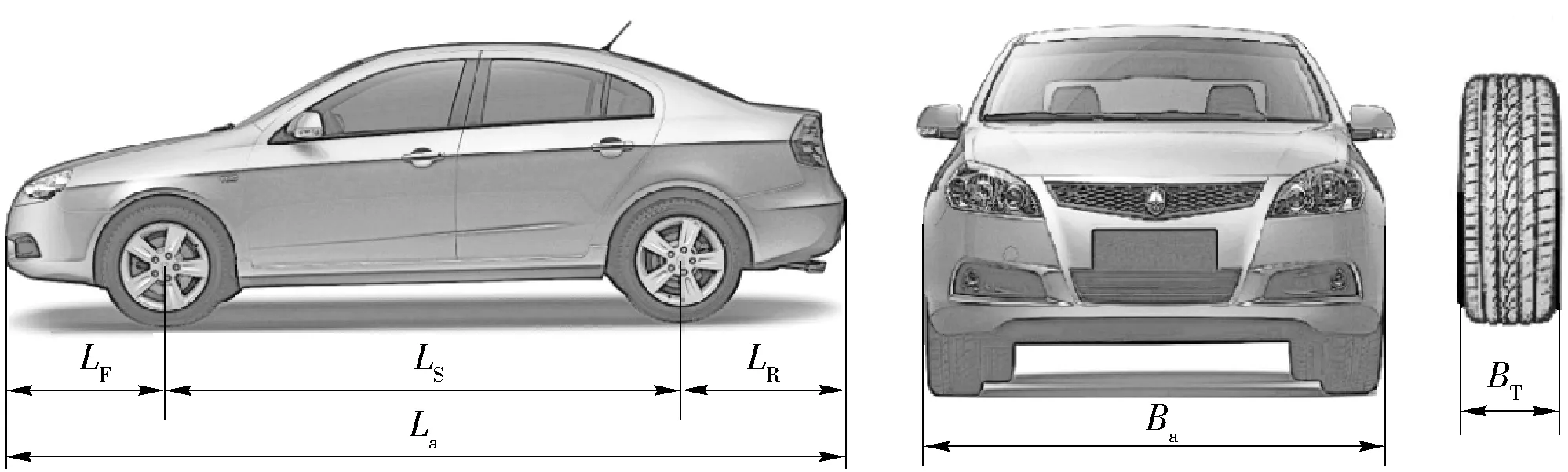
图2 车辆模型示意图
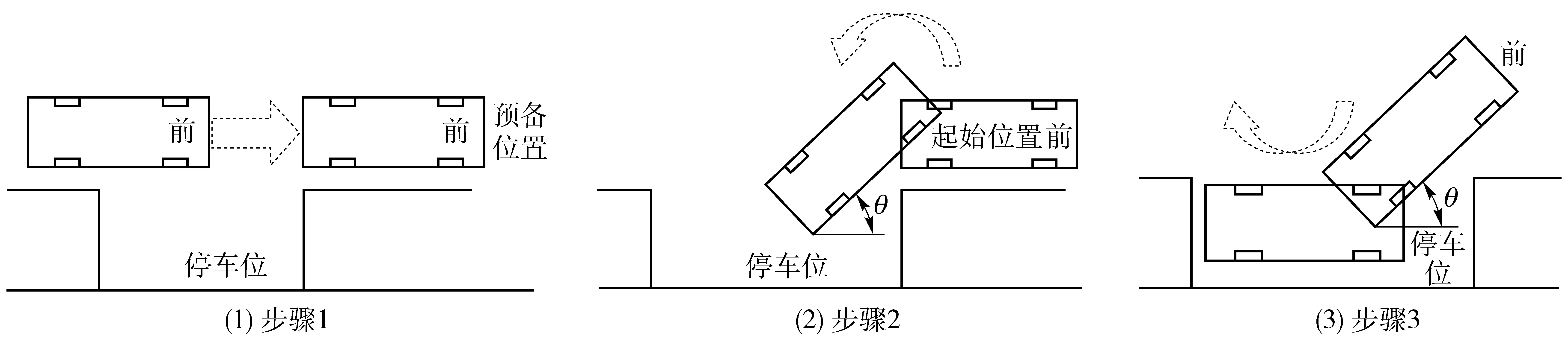
图3 平行式泊车过程分析示意图
图中,La为车长;Ba为车宽;LS为轴距;LF为前悬;LR为后悬;BT为轮胎宽度.
理想的平行式泊车入位的过程大致可分为3个步骤[7],如图3所示.
步骤1将车辆行驶到起始位置;
步骤2向右转动方向盘,开始倒车,使车身转动大约45°;
步骤3向左转动方向盘,继续倒车,使车身回正.
在上述泊车过程中,有5个可能会发生碰撞的危险点[7],如图4所示.
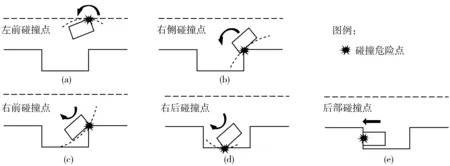
图4 5个碰撞危险点示意图
2 建模分析
2.1 数学建模
在上述分析的基础上,可以建立平行式泊车入位过程数学模型. 根据步骤2和步骤3的泊车过程推导其轨迹方程.
1) 步骤2的轨迹方程
(x-a2)2+(y-b2)2=(LS·cotα2-Ba+BT)2
(1)
其中


式中,Ba、LS、BT、LR分别为车辆参数,详见图2;BB为泊位宽度;S1、S2、S4分别为考虑到碰撞危险点所预留出的安全距离;α1为步骤3中外侧转向轮转角[9];α2为步骤2中外侧转向轮转角[8](图5).
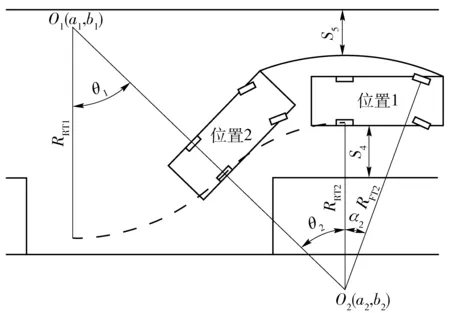
图5 平行式泊车过程步骤2分析示意图
2) 步骤3的轨迹方程(图6)

(2)
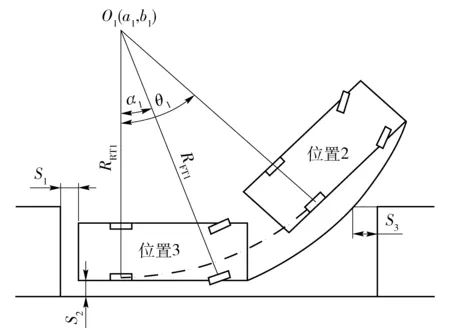
图6 平行式泊车过程步骤3分析示意图
2.2 仿真模型
2.2.1 仿真方法
利用MATLAB软件,根据平行式泊车过程的轨迹方程(1)、(2)进行“一把轮”平行泊车过程仿真.
在仿真中考虑了如下因素:
1) 车型. 本研究调研并选取了大众捷达、大众帕萨特、奥迪A4L等167种车型的数据进行仿真;
2) 驾驶员泊车时能时刻保持最小转向半径转向. 在仿真时,将最小转向半径乘以安全系数i(i=1.1). 仿真结果如图7所示.
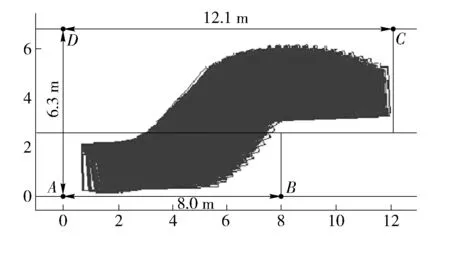
图7 平行泊车过程仿真图
根据仿真结果,确定“一把轮”泊车所需的最短距离.
2.2.2 仿真结果
图7中阴影区域为各个常见车型在i=1.1的安全系数下进行平行式泊车时车身的轨迹,因此为避免车辆与障碍物发生碰撞,泊车过程所需总长度,即C、D两点间距离约为12.1 m;所需泊位长度,即A、B两点间距离为8.0 m;受车辆左侧障碍物影响,车辆泊车过程可使用的宽度,即A、D两点间的距离约为6.3 m.
显然,如果为了确保停车入位的安全性,仅按照现行的规范,保持A、B两点间距离为8.0 m的话,会浪费过多的土地资源. 为此,提出了设立共用区域的想法. 即在两车位之间,预留出一部分公共空间供两车入位、出位使用.
根据各个常见车型的参数数据以及MATLAB的仿真结果,考虑到平行式泊车过程中可能会遇到的5个碰撞危险点,确定了可以确保安全的新型“一把轮”平行式停车泊位的施划方法,如图8所示. 其中,停车区域长度为5.4 m,共用区域长度为1.3 m,泊位宽度为2.6 m.
通过与传统的平行式停车泊位施划方法的对比计算,得到新型的“一把轮”平行式停车泊位可节约的面积为ΔS=2.18n+3.38(m2),节约的长度为ΔL=0.3n+1.3(m). 其中n为泊车位个数. 通过数据计算结果推算,在1 000 m长度的道路上,应用现有平行式停车泊位施划方法[4]可以施划142个停车泊位,而应用本研究优化后的施划方法可以施划150个停车泊位,泊位数量提升了8个.
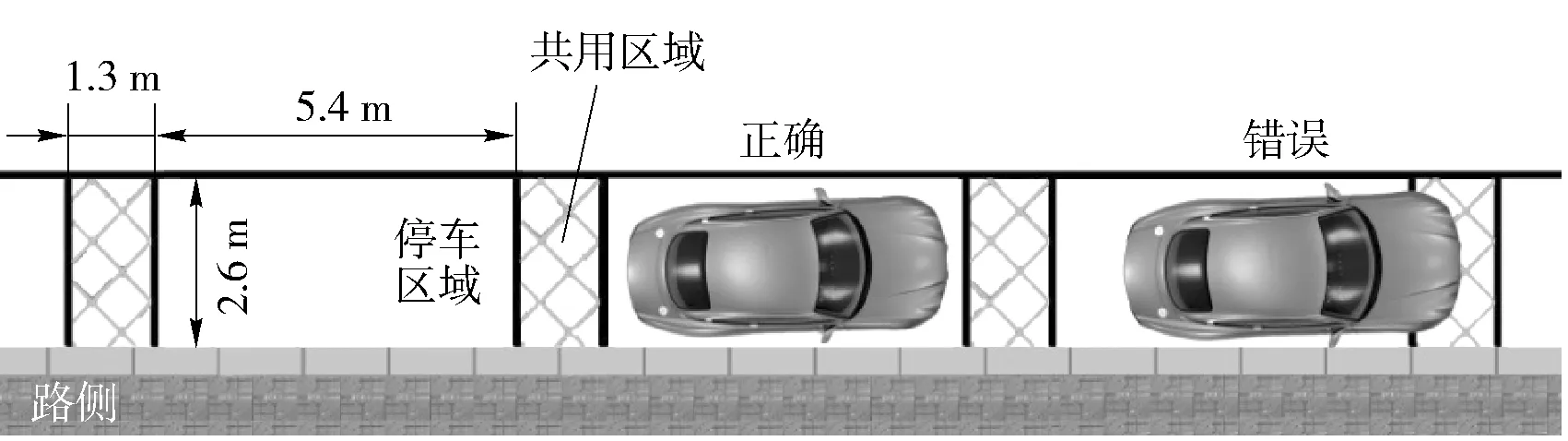
图8 优化后泊位效果图
最后,根据理想的平行式泊车过程的轨迹方程(1)、(2)以及MATLAB的仿真数据,施划出停车入位引导线,如图9所示.
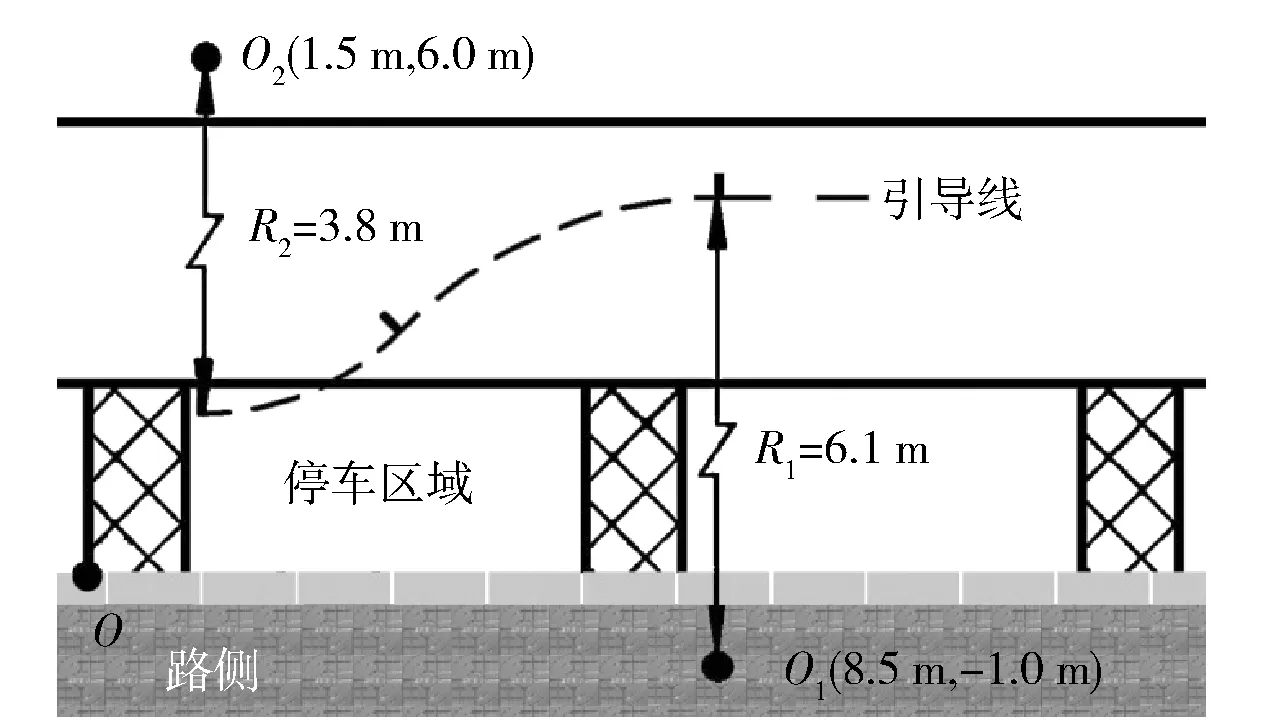
图9 停车泊位及引导线施划方法
即,以O点为原点,并以O1(8.5 m, -1.0 m)为圆心、R1=6.1 m为半径,及以O2(1.5 m, 6.0 m)为圆心,R2=3.8 m为半径,作两段相切圆弧,即可施划出泊车引导线,如图9所示. 新型的停车泊位包括了共用区域的停车位加上引导线,便是本文提出的“一把轮”停车泊位施划方法.
2.3 使用过程说明及实验验证
驾驶员在借助引导线泊车过程中,将车辆的左后轮贴近引导线,即可安全准确便捷地实现“一把轮”泊车入位,如图10所示.
为验证理论计算和仿真研究成果的可行性,我们还选择了5种小型车车型(大众捷达、别克GL8、福特嘉年华、菲亚特西耶那、斯巴鲁森林人)进行了24组、48次实车试验. 实车试验结果为“一把轮”泊车入位概率原有施划方法为62.5%,按新型施划方法为83.3%,2种概率差值为20.8%.
本研究提出的停车泊位及引导线施划方法,可以有效地协助驾驶员安全、准确、便捷地实现“一把轮”泊车入位,提高了泊车效率,在一定程度上缩短了泊车时间.
3 结束语
本研究针对现有路侧平行式停车入位次数较多、停车秩序较乱及过多占用道路空间资源等问题,提出了“一把轮”停车泊位施划方法.
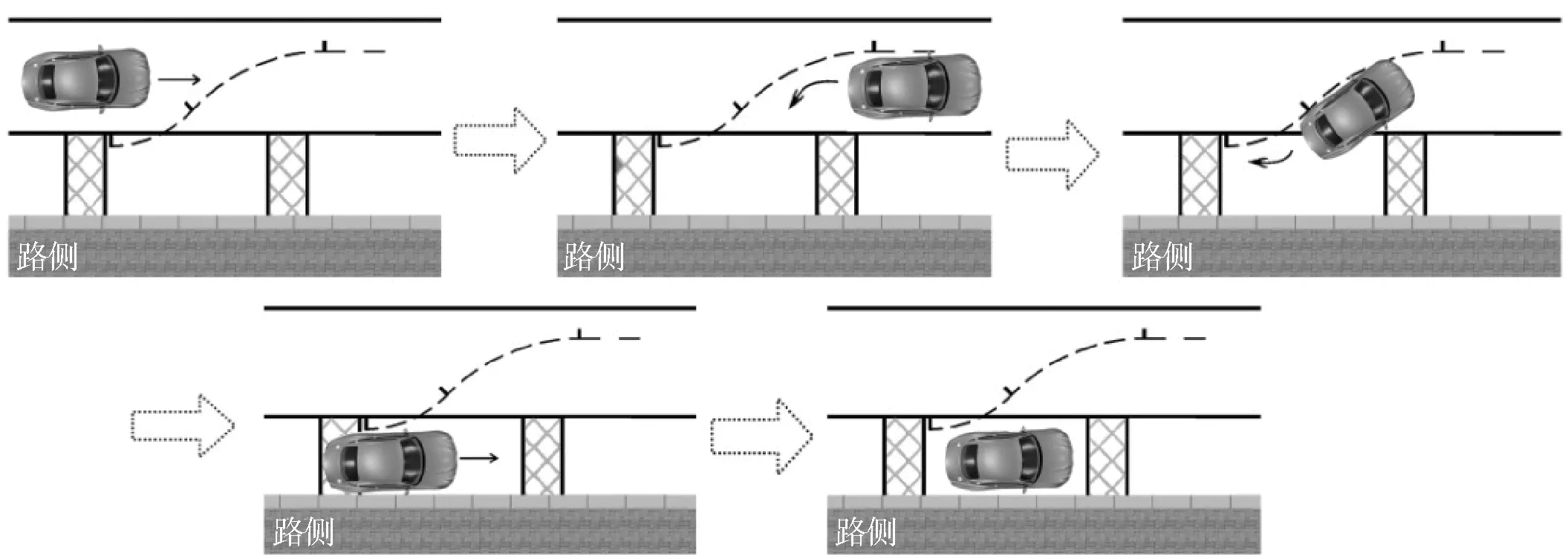
图10 驾驶员借助引导线泊车过程示意图
理论计算及仿真结果表明,本研究提出的路侧平行式停车泊位施划方法的优化方案可以在一定程度上节省停车场占地面积,并能使较常见车型安全顺利地实现“一把轮”泊车入位,从而提高泊车效率、节省能源、降低污染排放.
经过理论计算和实车试验验证,本研究取得成果如下:
1) 提出了“一把轮”泊车入位的构想并从理论和实践可行性方面进行了研究. 该方法有助于提高路侧平行式停车的效率,提高安全性;
2) 提出了设立“共用区域”的想法,以规范车辆停车. 该方法有助于改善路侧平行式停车秩序,节省停车泊位占地面积;
3) 提出了设立引导线的方法,辅助驾驶员泊车,降低泊车难度,使驾驶员更容易“一把轮”泊车入位,提高路侧平行式停车效率,减少污染.
此外,本研究提出的平行式停车泊位施划方法及研究成果,也为国家相关标准规范的补充完善提供了参考依据.
本研究还处于起步阶段,实车试验样本量尚显不足,有待于在今后的研究中继续完善,进一步验证研究成果的可行性.
[1] 许跃芝. 全国机动车保有量已达2.4亿辆驾驶人突破2亿[EB/OL]. [2013-01-31]. http:∥news.qq.com/a/20130131/000296.htm.
[2] 金可. 北京市机动车保有量破520万辆[EB/OL]. [2013-01-10]. http:∥auto.sina.com.cn/news/2013-01-10/08261087929.shtml.
[3] 北京日报. 北京交通委运输管理局公布2013年备案停车位情况[EB/OL]. [2013-04-10]. http://www.gov.cn/gzdt/2013-04/10/content_2374428.htm.
[4] 关宏志, 刘小明. 停车场规划设计与管理[M]. 北京: 人民交通出版社, 2003.
[5] 过秀成. 城市停车场规划与设计[M]. 北京: 中国铁道出版社, 2008.
[6] 王望予. 汽车设计第四版[M]. 北京: 机械工业出版社, 2004.
[7] 王明明, 周苏. 基于路径规划的泊车预备倒车区域研究[J]. 佳木斯大学学报: 自然科学版, 2012, 30(2): 167-170.
[8] 宋金泽, 戴斌, 单恩忠, 等. 融合动力学约束的自助平行泊车轨迹生成方法[J]. 中南大学学报: 自然科学版, 2009, 40(1): 135-141.
[9] 余志生. 汽车理论第五版[M]. 北京: 机械工业出版社, 2009.
ResearchonDelimitationMethodtoImprovetheEfficiencyoftheParallelParking
SU Qing1, GUAN Hong-zhi2, CONG Xiao-yu3
(1.College of Metropolitan Transportation of Beijing University of Technology, Beijing 100124, China;2.College of Architecture and Civil Engineering of Beijing University of Technology, Beijing 100124, China; 3.College of Environmental and Energy Engineering of Beijing University of Technology, Beijing 100124, China)
2014- 04- 24.
苏 晴(1992—), 女, 北京人, 研究方向为交通规划、交通安全. E-mail: sq-1917@qq.com.
TU 248.3
A
1008-2522(2014)03-21-05
猜你喜欢
汽车实用技术(2023年10期)2023-06-14 07:13:06
中国机械工程(2022年22期)2022-11-25 08:23:44
汽车实用技术(2022年19期)2022-10-19 07:46:46
中国机械工程(2022年10期)2022-05-31 04:12:24
汽车实用技术(2022年7期)2022-04-20 11:57:58
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
中国机械工程(2019年19期)2019-10-28 02:34:04
中国机械工程(2018年23期)2018-02-02 11:42:16
水道港口(2016年3期)2016-04-07 13:50:11
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:55