
基于智能滑模控制的永磁直线同步电机调速系统*
2014-08-08 01:09万里瑞王才东
电机与控制应用 2014年2期
王 辉, 万里瑞, 王才东
(1. 郑州轻工业学院 机电工程学院,河南 郑州 450002;2. 河南广播电视大学 机电工程系,河南 郑州 450008)
0 引 言
永磁直线同步电机的动子直接驱动负载,省去了中间传动环节,简化了系统结构,缩小了体积,增加了推力密度,提高了工作效率和控制精度,且稳定性和响应速度等性能也更加优越[1-2]。由于存在端部效应、系统参数摄动、摩擦阻力等不确定性因素的影响,增加了系统的控制难度[3]。传统的PID控制具有结构简单、输出稳定、易于实现等优点而被沿用至今。在高速、高精、负载扰动大的加工场合,传统PID控制不能达到理想控制效果[4-5]。文献[6-8]将神经网络控制算法引入到永磁直线同步电机伺服控制系统,缩短了调节时间,加快了速度响应,减小了超调,增强了伺服控制系统抗干扰能力。
本文针对传统PID控制算法的局限性,以滑模变结构理论为基础,建立滑模控制器作为系统速度调节器。利用径向基函数(Radial Basis Function, RBF)神经网络整定滑模控制器参数,实现滑模控制器参数的自调节,达到提高永磁直线同步电机的伺服控制系统的动、静态性能的目的。
1 永磁直线电机数学模型
永磁直线同步电动机的数学模型与永磁旋转同步电动机的数学模型基本相同。在推导中,作如下假设: (1) 忽略铁心饱和及温度的影响;(2) 不 计涡流和磁滞损耗;(3) 动子上没有阻尼绕组,永磁体也没有阻尼作用;(4) 反电动势是正弦的[9-10]。
则,dq坐标轴电压方程为
(1)
式中:ud、uq——d轴、q轴电压;
R——电机绕组电阻;
id、iq——d轴、q轴电流;
Ld、Lq——d轴、q轴电感;
τ——极距;
ωe——电机运行时的电角速度;
Ψr——永磁体磁链。
电磁推力方程为
(2)
机械运动方程为
(3)
式中:m——电机动子的质量;
D——电机运行时的黏性系数;
Fl——负载。
2 滑模控制器设计
由于滑模控制器具有在滑动模态下动态品质好,对系统参数摄动和外部干扰具有很强的鲁棒性等优点[11]。本文采用矢量控制策略实现对永磁直线电机电流和速度的调节,以速度误差作为输入项,建立滑模控制器的切换面,采用指数趋近律方法,以加快趋近速度,减小抖振。
根据式(1),其电压方程可变形为
(4)
由于采用矢量控制方式,因此有d轴电流为零,即id=0,故式(4)中的q轴电流表达式可变为
(5)
根据式(3),永磁直线同步电机机械运动方程的可表示为
(6)
式中,x为永磁直线电机动子的线位移。
取系统的误差状态变量:
(7)
式中:v*——给定速度值;
e1——速度误差;
e2——加速度误差。
误差状态方程可表示为
(8)

根据式(8),可取切换函数为
σ=ce1+e2
(9)
式中,c为常数,影响滑动模态的动态品质和渐近稳定性。
切换函数的微分形式为
(10)
如果采用指数趋近律,即

(11)
式中,k和ε均为大于零的常数。
则
(12)
从式(12)可知,切换函数σ与其导数之积小于零,满足滑动模态的到达条件。
则滑模控制器的控制量为
(13)
3 RBF神经网络滑模控制
RBF神经网络是一种具有单隐层的且局部逼近的三层前馈网络,可以任意精度逼近任意连续函数[12]。RBF神经网络的基本思想是用径向基函数作为隐含层单元的基,构成隐含层空间,隐含层对输入矢量进行变换,将低维模式的输入数据变换在高维空间内,使得在低维空间内线性不可分问题在高维空间内线性可分[13]。

图1 RBF神经网络辨识结构原理图

利用RBF神经网络实现对滑模控制器参数的辨识,输入向量为X(k)=[x1x2(k)x3(k)]T=[v*(k)v(k)u(k)]T,隐含层与输出层间的权值向量为W(k)=[w1(k)w2(k) …wn(k)]T,隐含层径向基向量为H(k)=[h1(k)h2(k) …hn(k)],其中径向基函数表达式为
(14)

bi(k)——第i结点的基宽。
则RBF神经网络的输出表达式为
(15)
为实现RBF网络权值、中心矢量和径向基函数基宽的自动调节,构造性能函数E1(k)为
(16)
于是,性能函数对权值导数为
(17)
性能函数对节点中心的导数为
(18)
性能函数对基宽的导数为
(19)
根据delta法则,并考虑动量项的影响,应用于输出层权值调整的学习算法为
Δwi(k)=η[v(k)-vm(k)]hi(k)+
α[wi(k-1)-wi(k-2)]
(20)
式中:η——学习速率;
α——动量因子。
节点中心调整的学习算法为
(21)
径向基函数基宽调整学习算法为
wi(k)hi(k)+α[bi(k-1)-bi(k-2)]
(22)
为了实现对滑模控制器参数的自动调节,构造性能函数E2(k),则
(23)
根据梯度下降法,可求解出性能函数对指数趋近项参数k(k)的导数为
(24)
性能函数对等速趋近项参数ε(k)的导数为
(25)
性能函数对切换函数参数c(k)的导数为
(26)
被控制子系统的数学模型未知,但RBF网络的输出能逼近被控制子系统输出,故可利用RBF网络的输出与控制量u(k)的导数近似代替实际系统输出与控制量u(k)的导数,即
(27)
于是,采用delta法则,可分别出解出k(k)、ε(k) 和c(k)的学习算法为

(28)

(29)
Δc(k)=ηc[v*(k)-v(k)]
(30)
4 算法仿真与结果分析
为验证基于RBF神经网络的滑模变结构控制器对永磁直线同步电机的调速性能,对该控制器进行仿真研究。永磁直线同步电机的主要参数如下: 电阻R=2.65Ω,电感Ld=Lq=0.00267H,定子永磁体磁链Ψr=0.30303Wb,极距τ=0.016m,动子质量m=28kg。图2所示为基于RBF神经网络的滑模变结构永磁直线电机矢量控制结构图,图中电流环采用PI控制器,速度环采用基于RBF神经网络的滑模变结构控制器以实现对速度的调节。
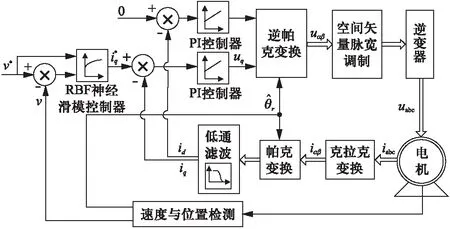
图2 基于RBF神经网络滑模变结构永磁直线电机矢量控制结构图
试验在额定速度下,分别对空载和额定负载两种情况进行研究,结果如图3~图6所示。


图3 基于SMC控制的空载响应曲线

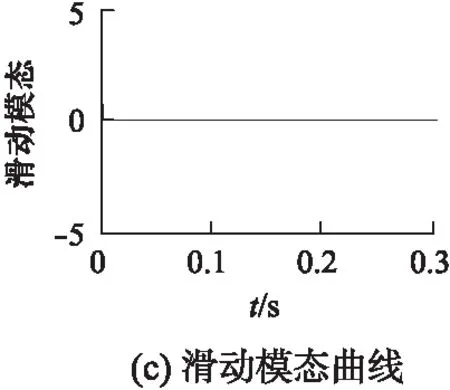
图4 基于RBF-SMC控制的空载响应曲线
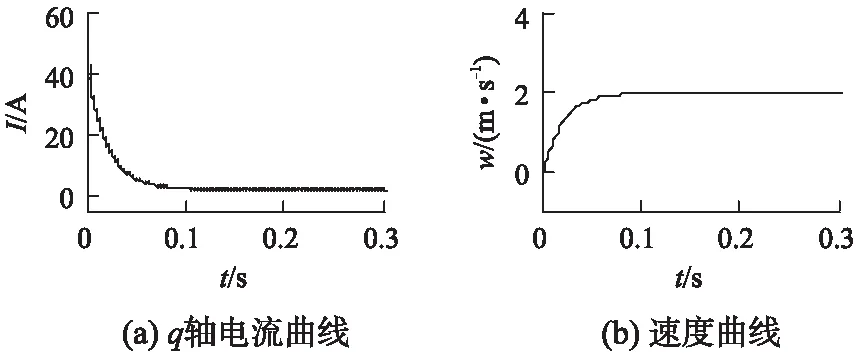

图5 基于SMC控制的负载响应曲线
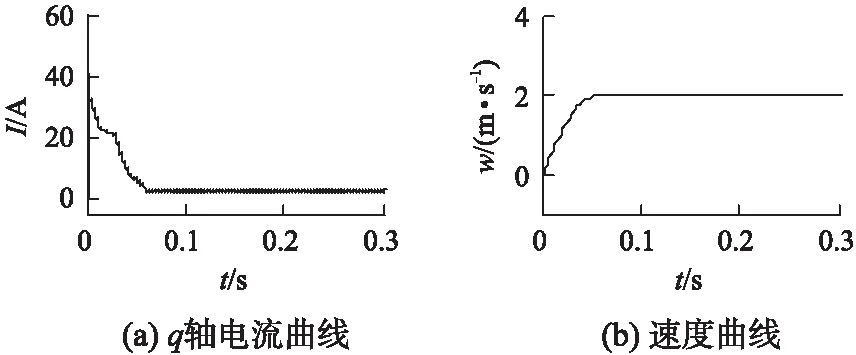

图6 基于RBF-SMC控制的负载响应曲线
从图3~图6可知,无论是空载还是负载,两种控制下的速度响应曲线都没有超调,都能在很短时间内达到设定值且在设定值处稳定运行。与基于SMC控制的调速系统相比较,基于RBF-SMC控制的调速系统速度响应更快速。在过渡过程,从电流响应曲线可知,基于RBF-SMC控制的调速系统,其q轴电流较小,因而对系统的冲击也较小。在稳态时,从滑动模态响应曲线可知,基于RBF-SMC控制的滑动模态曲线抖振较小。因此,基于RBF神经网络滑模变结构调速系统综合性能更优。
5 结 语
本文针对传统SMC控制器在永磁直线同步电机调速系统应用中的缺陷,将RBF神经网络与SMC算法相结合,利用RBF能够逼近任意非线性函数的能力,对被控制对象进行辨识,提出基于RBF神经网络的滑模变结构控制方法,以提高传统滑模控制算法的收敛速度,减小抖振,提高精度。仿真试验结果表明,本文提出的基于RBF神经网络SMC控制算法与传统SMC控制算法相比,能够减小抖振,且瞬态电流冲击小,有利于提高系统的稳定性、快速性及控制精度。
【参考文献】
[1] 刘晓,叶云岳,郑灼,等.空心式永磁直线伺服电机气隙磁场及推力分析[J].浙江大学学报(工学版),2010,44(3): 533-538.
[2] 司纪凯,汪旭东,陈昊,等.永磁直线同步电机出入端磁阻力齿槽分量分析[J].电机与控制学报,2008,12(5): 550-554.
[3] 仇翔,俞立,南余荣.直线永磁同步伺服系统的滑模-神经网络控制[J].微特电机,2008,(2): 44- 47.
[4] 韩明文,刘军.永磁直线同步电机RBF神经网络的PID控制[J].电机与控制应用,2012,39(6): 29-32.
[5] SUN H, DAI Y H. Fuzzy PID control and simulation experiment on permanent magnet linear synchronous motors[C]∥Electrical and Control Engineering (ICECE), 2010 International Conference on, Institute of Electrical and Electronics Engineers 2010: 1047-1049.
[6] 孙宜标,闫峰,刘春芳.基于μ理论的永磁直线同步电机鲁棒重复控制[J].中国电机工程学报,2009,29(30): 52-57.
[7] 郑雪梅,赵琳,冯勇.同步电动机负载突变过程的神经网络控制[J].电机与控制学报,2006,10(4): 365-369.
[8] 佟绍成,李庆车,柴天偌.基于神经网络的一类非线性系统自适应输出跟踪[J].自动化学报,2000,26(3): 296-302.
[9] 韩明文,刘军.永磁同步直线电动机径向基神经网络PID控制[J].微特电机,2012,40(6): 62-64.
[10] 杨俊友,杨磊,董科.永磁直线同步电动机智能变结构位置控制[J].沈阳工业大学学报,2009,31(3): 241-246.
[11] 王辉,王长松,钟黎萍,等.基于滑模观测器的永磁同步电机低速下无传感器转子位置检测的研究[J].微电机,2011,44(1): 61-64.
[12] 刘金琨.先进PID控制MATLAB仿真[M].北京: 电子工业出版社,2005.
[13] 高隽.人工神经网络原理及仿真实例[M].北京: 机械工业出版社,2003.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
