汽车防抱制动系统的分数阶PID控制算法研究*
2014-08-08 06:43钱兆刚周红艳
重庆工商大学学报(自然科学版) 2014年10期
钱兆刚, 田 丽, 周红艳, 王 勇
(安徽工程大学 电气工程学院,安徽 芜湖 241000)
在汽车行驶中需要制动,特别是紧急制动时,车轮突然抱死会发生汽车方向失控、侧滑、甩尾等危险情况,很容易发生交通事故。汽车防抱死制动系统(ABS)是一种主动安全技术,在制动时自动控制,防止车轮抱死,提高了车辆的制动安全性[1]。目前,ABS的控制策略主要有逻辑门限值控制、最优控制、模糊控制和滑模变结构控制等[2]。逻辑门限值控制没有充分的理论基础,需要大量的实车试验来设定阈值,工作量大。最优控制是控制理论学科上的一种控制方法,需要建立比较精确的数学模型,不然得到的控制效果很差。模糊控制是一种基于知识和经验的控制方法,一般情况下很难建立一个完善的控制规则。在此针对单轮制动模型采用分数阶PID控制,具有较强的控制稳定性和抗干扰能力。最后,设计分数阶PID控制器,嵌入到单轮模型的防抱死制动系统Matlab/Simulink框图中,给出了仿真结果。
1 ABS工作原理及模型建立
实际的汽车防抱死制动系统主要由3部分组成,即车轮轮速传感器、电子控制单元、制动压力调节器,如图1所示。汽车在行驶过程中制动时,制动压力调节器通过增压、保压、减压的调节,控制制动力的大小,防止车轮抱死,汽车的稳定性,转向操纵能力都得到改善,同时制动距离变短,轮胎的使用寿命变长。汽车制动时是利用地面与轮胎之间的摩擦力来减速的,而与摩擦力密切相关的附着系数又与滑移率存在如图2所示的关系。制动时轮速降低,从而就在车身速度与车轮速度之间产生一个差值,这样的现象称为滑移现象[1]。通常用滑移率来衡量制动时车轮的滑移程度,滑移率是指车轮的滑移速度(车轮的实际速度与周向速度之差)与实际速度之比,即
(1)
因此,防抱死制动系统的基本原理就是轮速传感器先采集车轮的速度,电子控制单元也就是ECU根据车轮速度估算出车速,在此基础上进行滑移率的计算,再通过对滑移率值的判断,给制动压力调节器发出调节指令,使得滑移率保持在所期望的值附近。在了解ABS的工作原理后,需对汽车的单轮模型、轮胎、制动系统和控制器进行仿真模型的建立。
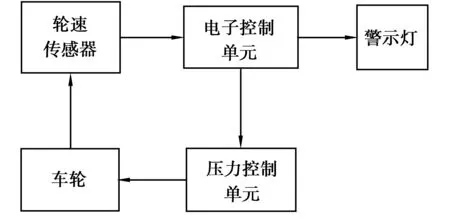
图1 典型ABS模块图

图2 滑移率-附着系数关系曲线
1.1 单轮车辆模型
本文采用简化的单轮模型[1,3],受力分析如图3所示。
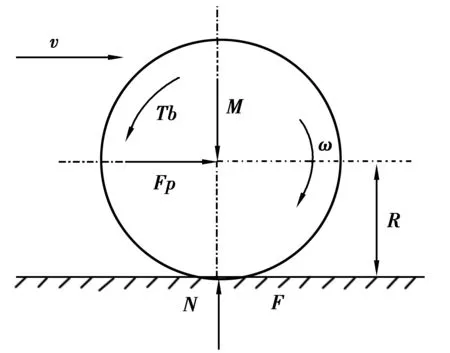
图3 单轮车辆受力分析
根据以上受力图分析可得:
车辆运动方程
(2)
车轮运动方程
(3)
车轮纵向摩擦力
F=μN
(4)
式(2)、式(3)、式(4)中:M为四分之一车体质量(kg);v为车辆速度(m/s);F为车轮摩擦力(N);R不车轮转动惯量(kg·m2);I为车轮滚动半径(m);ω为车轮角速度,(rad/s);μ为车轮与地面间附着系数;N为地面对车轮的作用力(N)。
1.2 轮胎模型
双线性轮胎模型计算公式为[1,4]
(5)
式(5)中:ST为最佳滑移率;S为车轮滑移率;μg为滑移率为100%时的附着系数;μh为峰值附着系数;μ为附着系数。
1.3 制动系统模型

(6)
为方便控制算法的实现,将制动器理解为理想原件。所以,制动器方程可表示为
Tb=kp·P
(7)
式(7)中:kp为制动器制动因数(N·m/kPa);P为制动液压力(kPa)。
2 控制器设计
2.1 控制算法的选择
传统PID控制器大量应用于工业生产活动中的重要原因就是它的结构简单,容易实现,面对复杂的现场环境具有很强的鲁棒性。实际运行结果表明:众多工业对象在PID控制器控制下,现场的控制效果很好[4]。
分数阶微积分理论已经经过三百多年的发展,但鉴于早期各种条件的限制,其只局限于理论研究。随着计算机科学技术的发展,在材料的记忆、力学和电特性的描述、粘弹性阻尼、分形理论等一系列领域中,相继出现了分数阶微积分[5]。在控制工程中的应用也逐渐盛行起来,分数阶控制理论是对传统的整数阶控制理论的一种概括和补充。分数阶微积分放大了传统整数阶微积分的应用范围在于它的微分、积分的阶次是任意的实数,不是传统的整数。一般分数阶系统就由分数阶微分方程描述:
anDany(t)+…+a1Da1y(t)+a0Da0y(t)=bmDβmu(t)+…+b1Dβ1u(t)+b0Dβ0u(t)
(8)
其中:an>an-1>…>a1>a0≥0,βm>βm-1>…>β1>β0≥0为任意实数;ai(i=0,1,2,…,n)和bj(j=0,1,2,…,m)为任意常数。将设计的分数阶PID控制器就是分数阶微积分的理论与所熟知的PID控制器相结合的产物。
2.2 分数阶PID控制器
分数阶PIλDμ控制器的传递函数为
(9)
式(9)中:λ,μ分别表示积分阶次和微分阶次,λ,μ≥0;KP为比例增益;KI为积分系数;KD为微分系数;U(s)为控制器的输出;E(s)为控制器的误差输入[7]。分数阶PIλDμ控制器能够更灵活地控制受控对象的原因在于它比常规的PID又多了两个可整定的数值——积分阶次λ和微分阶次μ。在合理调节5个参数(KP,KI,λ,KD和μ)的情况下设计出的分数阶PIλDμ控制器,不管对于传统的整数阶系统还是目前的分数阶系统,均能取得优于传统PID控制器的控制效果。其实,所熟知的常规PID控制器就是分数阶PIλDμ控制器在λ=1和μ=1时的情况;并且当λ=1,μ=0时,就是控制器;当λ=0,μ=1时,就是PD控制器。
因为分数阶PID控制器的阶次是分数的,所以采用滤波算法中的Oustaloup算法,在Matlab/Simulink中框图化实现分数阶微积分运算。仿真中的分数阶微积分模块由一个Oustaloup滤波器和一个低通滤波器串联起来[5],如图4所示。为方便在模型中研究各类控制器,选中Simulink中分数阶PID控制器的所有部分,右键点击CreateSubsystem,建立控制器的子模块。

图4 分数阶PID控制器
3 仿真及结果分析
3.1 仿真模型的建立
经过上面对汽车ABS系统各子模块模型的研究,将其组合在一起,在Matlab/Simulink中搭建单轮模型,所得结构框图见图5。

图5 单轮仿真模型
3.2 仿真结果分析
本文分别对汽车没有ABS,有ABS时采用的模糊控制器以及分数阶PID控制器3种情况进行Matlab/Simulink仿真,得到的各类曲线如图6、图7、图8所示。由图6可知,汽车在制动时,如果没有配备ABS系统,那么滑移率在很短的制动时间内就上升到1,也就意味着车轮快速抱死,这是非常危险的。同样从制动距离曲线看出,汽车从制动到完全停止,经过了很长一段距离,在前方有障碍物等情况下紧急制动时,交通事故的发生率将大大上升。而在汽车配备ABS系统情况下,各项指标将得到了很好地优化。图7和图8分别给出了汽车带ABS系统时,基于模糊控制器和分数阶PID控制器的滑移率和制动距离变化曲线。在这两种控制情况下,结果曲线显示,制动时汽车车轮不会抱死。但模糊控制时,滑移率始终在0.2上下波动,不能稳定在0.2,而分数阶PID控制时,除了开始时有点超调外,到车辆完全停止时,能基本稳定在0.2,没有波动,稳定性强。而在相同情况下,分数阶PID控制时,制动距离也相应减小不少。因此,设计的分数阶PID控制器,运用在汽车ABS中时的各项控制指标基本达到期望值。
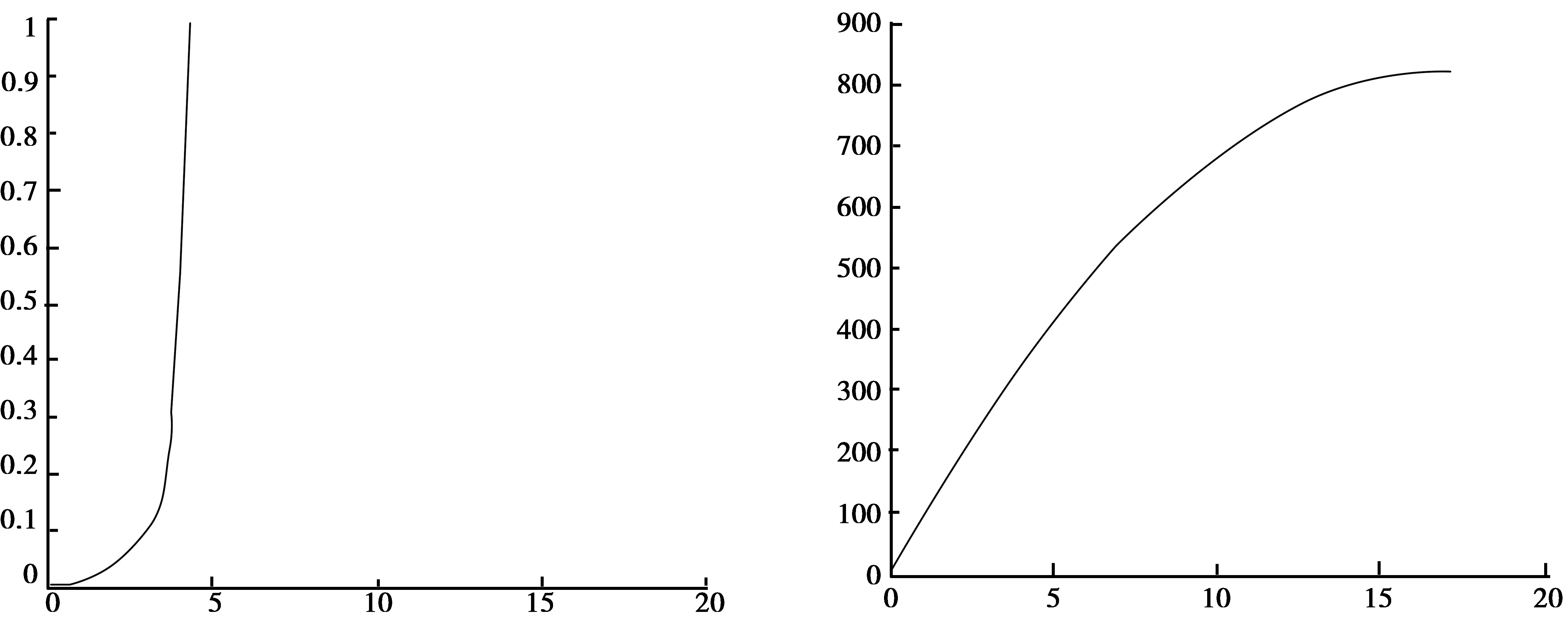
图6 无ABS情况下滑移率和制动距离曲线
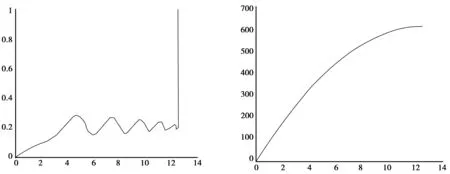
图7 ABS模糊控制器情况下滑移率和制动距离曲线
4 结 语
本文设计的基于分数阶PID控制的汽车ABS系统,能够使车轮的滑移率稳定的保持在正常情况下的0.2左右,且具有较快的响应速度和较好的稳定性,整体的控制效果优于传统的控制方法,因此,在以后的汽车ABS系统中可以考虑开发分数阶控制器。本文在使用Simulink建模时,进行了简化,这与实际系统之间存在一定差别;并且本文只是在单论模型上研究,不能反映出整车情形,因此在此基础上,建立更加精确的ABS半车模型或整车模型,以得到更反映实际情况的仿真结果。
参考文献:
[1] 程军.汽车防抱死制动系统的理论与实践[M].北京:北京理工大学出版社,1999
[2] 刘显贵,彭聪.防抱死制动系统滑模变结构控制研究[J].拖拉机与农用运输车,2009,36(1):26-27,30
[3] 王铁,田立国,白雪峰.模糊PID控制在车辆制动过程中的应用[J].沈阳理工大学学报,2010,29(4):17-21
[4] 张颖,袁朝辉.汽车防抱死系统的模糊PID控制算法研究[J].计算机仿真,2010,27(12):312-315
[5] 罗佑新.新型分数阶PID控制器及其仿真研究[J].哈尔滨工业大学学报,2009,41(5):215-217
[6] 袁幼成,周宗福,周辉.一类分数阶微分方程共振边值问题解的存在性[J].重庆工商大学学报:自然科学版,2012,29(3):1-6
[7] 赵春娜,李英顺,陆涛.分数阶系统分析与设计[M].国防工业出版社,2011
猜你喜欢
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
汽车实用技术(2019年24期)2019-12-27
组合机床与自动化加工技术(2019年7期)2019-08-06
轴承(2019年6期)2019-07-22
设计(2018年4期)2018-11-08
价值工程(2017年28期)2018-01-23
公路与汽运(2016年6期)2016-12-12
振动与冲击(2016年15期)2016-09-13