
基于MEMS的数据手套传感技术研究
2014-08-07 13:20王伟栋费洁杨英东钱峰
微型电脑应用 2014年1期
王伟栋 费洁 杨英东 钱峰
基于MEMS的数据手套传感技术研究
王伟栋 费洁 杨英东 钱峰
目前数据手套大多采用机械式、光纤式或者图像识别等方法来获取手势姿态。基于MEMS传感器设计的数据手套利用MEMS传感器(三轴陀螺、三轴加速度计和三轴磁阻),根据惯性测量原理,采用基于四元数解算的扩展卡尔曼滤波信息融合方法来获得手指全姿态信息,克服了传统方法的局限性。其穿戴方便、运动自由度大、抗干扰能力强,且不受光线条件的约束。测试和实验的结果表明,基于MEMS传感器的数据手套稳定可靠,具有一定的创新性和实际应用参考价值。
MEMS;数据手套;姿态测量;手部运动学;扩展卡尔曼滤波
0 引言
人类与外界进行交互的过程中,手势动作是最重要的方式方法,人们用手势动作来表达思想,感知客观世界,完成各种操作。数据手套是虚拟现实系统[1]中非常重要的设备,它可以跟踪穿戴者灵活的手势姿态,记录穿戴者的动作,并实时地将其传送至处理显示系统例如上位机。虚拟现实技术正在高速发展,并被广泛使用,其中数据手套依托其自然高效的人机互动方式,更是在游戏娱乐、动画设计、手术教学、手语识别、可视化科学研究、机器人控制、军事情报等领域发挥着至关重要的作用。
传统的手势动作测量系统主要有机械式的和手套式的两大类。机械式系统中具有代表意义的是Dextrious HandMaster(DHM),手套式的代表有很多,诸如VPL公司的基于光纤原理的Data Glove、基于压电原理的Cyber Glove等等。
与传统的传感器技术相比,MEMS传感器(Micro-Electro-Mechanic System)具有体积小、重量轻、可靠性高、成本低、易于大规模生产等优点。近年来随着MEMS技术的普及以及其价格的下降,MEMS拥有广阔的工程应用前景,尤其是对小型运载体的导航制导与姿态控制具有重要意义。
微惯性传感器由集成封装的MEMS三轴速率陀螺、MEMS三轴加速度计和MEMS三轴磁阻传感器构成。多个微惯性传感器合理分布于数据手套独立运动部位,根据航姿解算的原理,解算出手势姿态,实时地高精度捕获手势动作。基于MEMS的数据手套,穿戴方便,运动自由度大,抗干扰能力强,且不受光线条件的约束,不会出现光纤材料的疲劳损耗带来的精度下降等问题,另外各传感器相互独立,利于维护,具有非常长的使用寿命。
1 手部运动学分析
1.1 人手结构
手部骨骼的主要组成部分是指节骨和关节,关节又分为手掌关节和手指关节如图1所示:

图1 人手骨骼结构
不同关节间的转动决定手的姿态,包括指节骨绕其相应关节的左右侧摆以及弯曲,具有很高的复杂度。其中,大拇指比较特殊,与手腕相连的关节以及指掌关节MP都有弯曲和侧摆两个自由度,远指关节IP处有1个弯曲自由度;除大拇指以外的4个手指均有4个自由度,包括MP的垂直于手掌的弯曲自由度和处于手掌水平面的侧摆自由度、PIP和DIP的弯曲自由度。另外,加上手在空间的6个自由度,所以人手共有27个自由度。
1.2 约束条件
手的自然运动是一种有规律的运动,所有的手指都是在其两个关节确立的平面中运动,并且各关节的弯曲角度有很强的相关性,文献[2]阐述了主要约束关系:
1) 指关节的弯曲侧摆范围有限,如MP关节的弯曲角度一般小于90°;2) 单个手指的3段指骨的运动是处于同一个平面内; 3) 除拇指外,各手指末端关节的弯曲度是其前面关节的弯曲度的2/3。
1.3 手指的运动速度
人类的手指十分灵活,可以完成多种复杂的动作,不过日常生活中手指的运动角速度并不大,在大量的实践操作基础上,通过加速度传感器数据得到的最大角速度(以食指、大拇指为例)如表1所示:

表1 不同动作下角速度
2 姿态解算方法
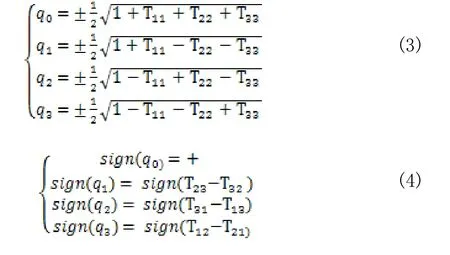
为了避免奇点问题,采用四元素解算姿态角。坐标变换矩阵[3]为公式(2):

由上述2式得到公式(3)、(4):
姿态矩阵的四元素的微分方程为公式(5)、(6):

姿态矩阵速率

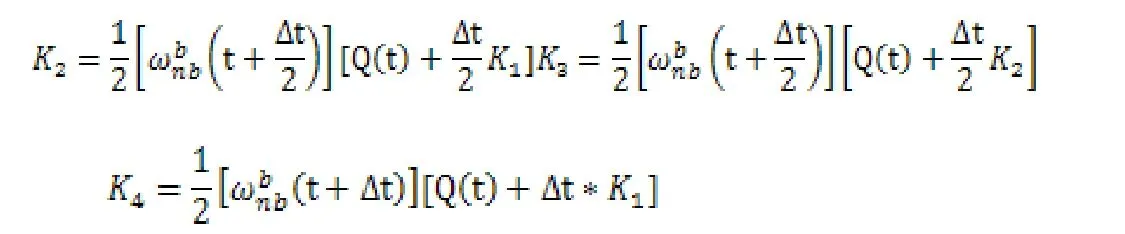
用四阶龙格库塔实现四元数的更新为公式(7):
2.1 四元数姿态算法
描述载体姿态的变化可以分解为载体的3次转动。这3次转动可以用数序方法描述成3个独立的方向余弦矩阵。


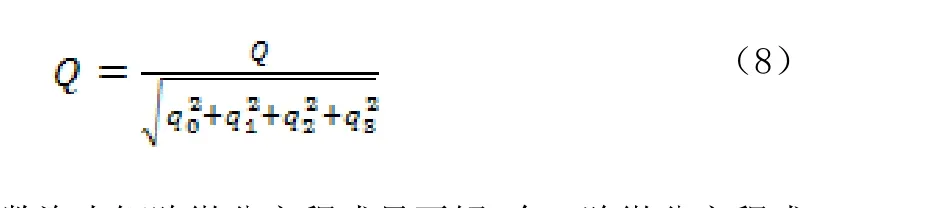
为了避免误差,提高精度,还需要规范化处理公式(8):
四元数姿态矩阵微分方程式只要解4个一阶微分方程式组即可,其计算量与方向余弦姿态矩阵相比有明显的减少,满足实时性的要求。[5]
2.2 初始对准算法
因为在静态时,载体坐标系与导航坐标系中的航向角是一致的,简化为公式(9):

在初始静止状态下,令加速度计的载体坐标系和运载体的载体坐标系重合,得到重力加速度在载体坐标系上的投影分量,分别记为,那么公式(10):


磁阻传感器输出的为磁场强度H在载体坐标系下3个轴上的投影分量,记为。根据可得公式(12)

2.3扩展卡尔曼滤波
陀螺的随机漂移会引起累计误差,需要使用信息融合对误差进行综合校正。
卡尔曼滤波用于时变系统的信号处理、数字滤波,是多传感器信息融合的一种重要方法。它根据动态设备相关信息,测量误差,系统噪声等,通过递推的算法获得系统在统计意义下的最优估计。
对于本微惯性传感器,其中非线性性质可能存在于过程模型中或者观测模型中。为了进一步提高精度和可靠性,这里使用扩展卡尔曼滤波器。
扩展卡尔曼滤波中,状态转换和观测模型并不要求是状态的线性函数,替换的公式如下:[6]

预测阶段:
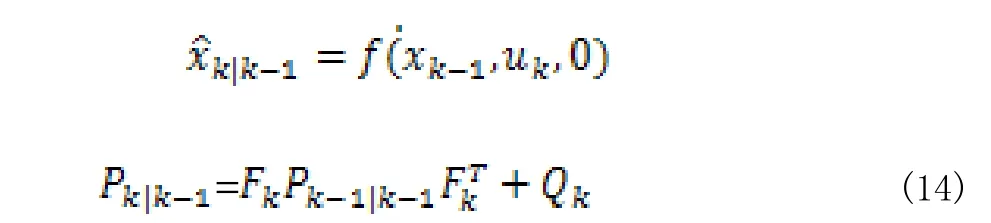
使用偏导矩阵更新模型为公式(15):

更新阶段:

3 传感器系统
数据手套传感器系统由多个微惯性传感器组合构成的传感器网络。每个微惯性传感器由三轴MEMS陀螺、三轴MEMS加速度计和三轴磁阻型磁强计构成,其中的每一个传感器的三个敏感轴(X,Y,Z)相互平行,组成测量载体的三维坐标系。三轴陀螺用于测量载体3个方向的绝对角速率,与时间积分计算角度增量;三轴加速度计用于测量载体3个方向的加速度,计量水平方向的倾斜,同时有助于修正陀螺在俯仰和滚动方向的漂移;三轴磁阻型磁强计通过测量地磁强度,以提供初始方向角同时也修正航向角的漂移。为了减少突然的高强度磁场引起的不稳定性,这里采用S/R开关电路消除磁阻传感器的漂移。加速度计和磁阻传感器不存在累积误差的问题,计算姿态角时在更长的时间内都是准确的。需要说明的是,用于姿态解算的Cortex M3芯片与3种类型的传感器一起集成于同一电路板中,即微惯性传感器可以输出解算好的姿态角,以及原始的其内的各传感器原始数据。
微惯性传感器尺寸为12*20*5mm,安置在手部的关节之间,尺寸满足设计要求,不影响手部关节的正常活动。微惯性传感器共6个,其中,5个微惯性传感器安置于手指关节之间,用于检测手部主要关节的弯曲角度,第6个传感器集成在手背的嵌入式测控单元中,用于测量手掌的姿态。嵌入式测控单元通过IIC获得各微惯性传感器数据,实时处理,并与上位机通信,如图2所示:

图2微惯性传感器分布图
嵌入式测控单元包括了根据手部约束条件的判断和数据的优化,这可以提高数据的准确性,并且减轻上位机的计算量。
4 实验与测试
4.1 传感器的标定
将传感器固定在六面体内部,传感器的坐标系与六面体棱边对齐;将六面体的 x,y,z 轴依次向上和向下放在水平面上,每一次向上或向下测量 2 次,即绕法向旋转180°,这样可以消除水平面的不平度对标定的影响,求二次平均值,测得各轴加速度计分别向上和向下共 6 组数据。
利用这六组数据,上位机标定解算软件中通过最小二乘法求出加速度计零位、标度因子和交叉耦合项,并将解算参数烧录到传感器中,这个过程通过编制的软件自动完成。
4.2 静态测试
使用无磁标定平台可对传感器进行静态测量,在测试前平台由高精度倾角仪校准,确保水平面两个轴向处于零位。基准边也由指北仪校准,指向真北。
将数据全部通过串口输出到PC中,得到俯仰、横滚、航向角的静态误差如图3所示:

图3微惯性传感器静态误差
可见,俯仰、横滚的静态误差在0.1°,减去上海的确的磁偏角4.33°,航向角的静态误差为0.15°,符合要求。
4.3 动态测试
这里采用我们自己研发的弱磁双轴电动转台对微惯性传感器进行俯仰、横滚的测量,它由内环横滚轴框架和外环俯仰轴框架组成,其控制精度为±0.08°。微惯性传感器固定在内环框中。
由于转台限定,这里分别测量60°/s和300°/s。300° /s已可以覆盖绝大部分的日常手势动作。跟踪能力如图4所示:

图4动态响应速度
通过对比可知,微惯性传感器与转台的曲线基本吻合,误差较小,动态精度为2°,但有一定的时延,微惯性传感器的内部更新频率为100Hz,延迟约为0.05s左右。
由于条件限制所限,采用的转台具有弱磁性,没有对方向角进行验证,后续需采用无磁转台开展进一步的实验。
5 总结
通过实验,本文提出的基于MEMS制作的微惯性传感系统,其姿态角度分辨率为0.05°,静态精度为0.1°,动态精度为2°,角速率最高可达到1200°/s,采样频率可达100hz,基本能够满足数据手套对传感器的要求。目前市场上的 5DT Data Glove 5 最大采样频率60hz,动态测量精度1°,分辨率0.2°。本文提出的基于MEMS微惯性传感器的数据手套除动态精度指标略低以外的其他指标都优于该产品。
整套系统经过长时间的测试,没有出现数据丢失的情况,表现出良好的稳定性。本文所述姿态解算方法以及用于测量手势的微惯性传感器整体系统的设计思想,可为数据手套研究和设计提供一种新的思路和方法。
[1] Spear,Brian.Virtual Reality:Patent Review.World PatentInformation[J].June,2002,24(2):103—109.
[2] JintaeLee, Tosiyasu L. Kunii, Model-based analysis ofhand posture [ J ]. IEEE Computer Graphics and applications, 1995, 15 (5) : 78~ 85
[3] 秦永元. 惯性导航[M]. 北京:科学出版社,2006, 33-67
[4] 孙章国. 基于ARM的航姿参考系统研究[D].上海交通大学,2010. 35-50
[5] 张荣辉,贾宏光,陈涛,张跃. 基于四元数法的捷联式惯性导航系统的姿态解算[J].光学精密工程2008,16(10).
[6] 邹波,张华,姜军. 多传感信息融合的改进扩展卡尔曼滤波定姿 [J].计算机应用研究,2013,31
Research of Sensing Technology of Data Glove Based on MEMS Sensor
Wang Weidong,Fei Jie,Yang Yingdong,Qian Feng
(Department of Instrument Science and Engineering, Shanghai JiaoTong University, Shanghai200240, China)
Currently data glove usually used mechanical, optical fiber type or image recognition method to obtain gestures.Data glove based on MEMS sensor use MEMS sensor (triaxial gyro, three-axis accelerometer and three-axis magnetic resistance) to obtain the finger posture information .It based on the quaternion algorithm of extendedkalman filtering information fusion method and the principle of inertial measurement. This data glove has multiple degrees of freedom ,strong anti-jamming capability and iseasy to wear, not bound by the light conditions. Through the testing and experimentation, it proved the data glove based on MEMS is stable at working and has certain innovation and actual application value.
MEMS; Data Glove; Attitude Measurement; Hand kinematics; Extended Kalmanfilter
TP242
B
1007-757X(2014)01-00039-04
2013.12.22)
王伟栋(1989-),男,山东,上海交通大学电子信息与电气工程学院,硕士研究生,研究方向:MEMS微惯性导航系统研究,嵌入式软硬件开发,上海,200240费 洁(1988-),女,安徽,上海交通大学电子信息与电气工程学院,硕士研究生,研究方向:MEMS微惯性导航系统研究,上海,8200240杨英东(1984-),男,山东,上海交通大学电子信息与电气工程学院,博士研究生,研究方向:高精度组合导航,上海市,200240钱 峰(1963-),男,上海交通大学,副教授,博士,研究方向:新型惯性仪器及组合导航系统,现代测控技术及嵌入式系统,复杂动态随机系统建模与仿真技术,上海,200240
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
