
船载X频段微波统一测控系统快速校相方法
2014-08-02 11:49:31瞿元新毛南平
遥测遥控 2014年2期
瞿元新, 毛南平
(飞行器测量与控制联合实验室 中国卫星海上测控部 江阴 214431)
船载X频段微波统一测控系统快速校相方法
瞿元新, 毛南平
(飞行器测量与控制联合实验室 中国卫星海上测控部 江阴 214431)
双通道单脉冲跟踪接收机必须通过校相保持和、差信道相位一致性,才能实现天线对目标的正常跟踪。快速校相已在陆地测控站的卫星长管任务中得到广泛应用,方法具有校相流程简单快捷等优点,但由于受到船摇的影响以及引导精度的限制,方法必须改进后才能应用到船载X频段微波统一测控系统。提出“粗校+精校”的多次快速校相方法,可有效解决船载窄波束天线海上角度标校的难题,提高船载测控设备自动化标校水平。
船载X频段微波统一测控系统; 角度标校; 快速校相
引言
船载X频段微波统一测控系统(简称船载UXB系统)作为船载精密跟踪测量雷达,对跟踪接收机相位、增益、线性(方位、俯仰交叉耦合及定向灵敏度)进行精确标定(角度标校),是保证船载UXB系统完成目标捕获跟踪的前提。船载UXB天线角度标校作为一项经常性标校项目,在码头的静态条件标校中存在标校塔不满足远场条件的问题,而在海上的动态条件且无标校塔情况下完成角度标校更为困难,因此需要探索和研究既适应海上的测控特点,且又标校精度高、操作性强、易于实施的角度标校方法。
船载UXB系统主天线和引导天线均采用双通道单脉冲跟踪体制来完成角度跟踪。双通道单脉冲跟踪接收机具有设备相对简单、跟踪精度高、角误差解调性能优良、容易实现等诸多优点,在精密跟踪测量雷达中得到了广泛应用。但它也存在着和、差通道相移不一致引起的交叉耦合问题,需要进行定期校正;而且校相结果受设备组合、工作频点、环境温度和极化方式的影响较大[1]。对于船载测控系统来说,跟踪接收机校相已经成为执行任务前不可或缺的工作。
对于船载测控系统,大部分卫星测控任务都在海上执行,不能随时对塔进行角度标校,过去通常采用码头对塔校相与海上微波自检相位修正相结合的方法。近年来随着测控系统无塔标校技术的发展,先后提出了射电星校相、卫星校相、快速校相等多种校相方案[1]。射电星校相[2]要求接收系统必须具备一定的G/T值,而船载UXB系统(12m天线)G/T值不够,无法使用射电星法进行角度标校。卫星校相采用同步卫星或低轨卫星进行标校,但是目前国内外还没有船载UXB系统标校所需频段的卫星。快速校相在陆地测控站的卫星长管任务中得到广泛应用,该方法具有校相流程简单、快捷等优点[3]。本文主要针对船载UXB系统波束特别窄的特点、船摇的影响以及引导精度的限制,在文献[3,4]描述的快速校相的基础上进行优化设计,以满足船载UXB系统海上校相的需求。
1 快速校相的基本原理
快速校相法也称动态校相法、两点校相法,它是一种根据数字引导、小天线跟踪等信息在对目标进行跟踪的同时完成校相的方法。文献[3,4]对快速校相的原理有详细的推导,本文不再详细描述。
当天线指向任一点P1(X1,Y1)时,该点在方位和俯仰上分别偏开电轴零点X1密位和Y1密位。在差路鉴相器中,参考信号与差路信号鉴相,经过低通滤波器之后,方位和俯仰误差电压为

式中,φ为差路信号的相位,A1、E1为方位和俯仰的差信号幅度,kcos(ωt+θ)、ksin(ωt+θ)为方位和俯仰的差路鉴相器参考信号,k为方位和俯仰的初始增益值,θ为方位和俯仰移相器的初始移相值。
假设天线方位正偏角度λ至P2(X2,Y1)点。由于方位信号与俯仰信号完全正交,P2点方位信号幅度A2=A+A1(A为方位正偏λ增加的信号幅度),俯仰信号幅度保持不变。此时方位和俯仰误差电压为

将P2点与P1点的误差电压相减,得到
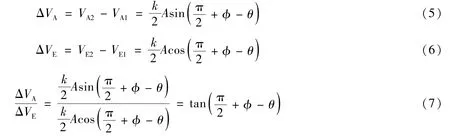
方位、俯仰移相器移相值的求解:首先,根据式(7)解出差路相位值φ,然后,由方位、俯仰信号垂直正交,得到移相值θA=θE=φ。
方位、俯仰移相器增益的求解:一般双通道跟踪接收机的角跟踪灵敏度为hV/mil,1mil=0.06°。方位和俯仰增益可按式(8)计算得到。

该校相方法已经应用在某测控站的卫星早期轨道任务支持中。通过实际应用,该方法能将校相时间从原来的十多分钟缩短到5秒以内,而且不需要完全对准目标,方位或者俯仰一次偏移即可完成校相目的,同时增益系数也不需要反复调整,使得软件实现自动校相变得比较简单[3]。
若要将该方法应用到船载UXB系统,必须解决如下问题:
①由于船摇的影响,在数字引导状态下船载UXB系统的船摇隔离效果比较差,必然会导致快速校相精度下降。
②船载UXB系统波束宽度很窄,这就对引导精度提出了更高的要求,如果数字引导、雷达互引导或小天线引导精度不够,则在跟踪或跟踪加偏之后很容易造成目标偏离主波束而导致快速校相精度变差甚至中断。
通过以上分析,若直接对船载UXB系统使用陆地站的快速校相方法而不进行改进,则会导致快速校相精度下降甚至中断。为此,本文在陆地站快速校相方法的基础上提出了“粗校+精校”的多次快速校相方法,解决了快速校相在船载窄波束天线中的应用和精度问题。
2 船载UXB系统海上校相的方法
船载UXB系统海上校相的方法主要有两种:一种就是目前在其它船载测控设备上都比较常用的码头校相数据差值记忆法,另一种则是改进的“粗校+精校”快速校相法,下面将分别介绍。
2.1 码头校相数据差值记忆法
在码头时的校相过程:①记录接收设备在不同组合、不同工作频点等条件下对标校塔(由于船载UXB系统的远场条件为8km,所以目前的标校塔是无法使用的,需要在远距离的高楼上架设一个临时信标进行标校)的相位标校值,此值确定为A,即相位零值。②记录与对塔相同的设备组合、工作频点情况下的偏馈或有线闭环相位差值,此值确定为B。
在出海后的校相过程:①对系统进行偏馈或有线闭环,完成和、差校相,记录相位值B1。②将其测试值与码头有线闭环的校相值进行比对(比对B和B1)。如果其相位值基本相同,且在一定的误差范围(8°)内,则认为原角度标校的相位数据A有效,可以直接使用,并通过放球进行检验。如果现场有线闭环测试的和、差相位值与码头有线闭环的校相值差别较大,则需要通过释放信标球进行快速校相,并将校相结果与码头结果进行比较,以确定新的相位值。
2.2 跟踪信标球进行“粗校+精校”的快速校相方法[5]
船载UXB系统的快速校相包括引导天线和主天线的快速校相。同时考虑到船摇和大小天线的不平行等因素的影响,快速校相可分为粗校和精校两个过程。如果引导跟踪接收机或主跟踪接收机初始装订的相位值可满足系统的跟踪要求(即极性正确,且交叉耦合优于3∶1),则可以略过粗校的过程,直接进行精校。
实现船载UXB系统的快速校相需要满足的基本条件:由于船载UXB系统主天线的波束比较窄,加上船摇的影响,跟踪目标时很容易脱离主波束,因此对船载UXB系统进行快速校相时,除对引导精度(包括数字引导、雷达互引导或小天线引导)要求比较高外,对加偏值的设定也要确保目标在波束范围之内。这就需要根据引导精度确定合适的加偏量和加偏方向。针对引导天线(波束宽度1.4°)的快速校相,可加偏3mil~6mil,而针对主天线(波束宽度0.2°),只能加偏1mil~2mil。如果不加偏时跟踪目标的误差电压为负值,则加正偏电压,反之加负偏电压。
2.2.1 引导天线的“粗校+精校”快速校相方法
引导天线“粗校+精校”快速校相过程如下:
①当装有X频段信标的气球飞至离天线8km时,开始快速校相;
②首先通过脉冲雷达或光学设备的互引导跟踪目标,在目标信号较为稳定的情况下,对引导接收机进行第一次快速校相,此时可得到初步的校相值,称为粗校值;
③将粗校值装订到引导跟踪接收机,同时通过方位、俯仰拉偏检查接收机相位,如果相位极性正确且交叉耦合满足跟踪要求(即交叉耦合优于3∶1),则转引导天线跟踪,否则返回第②步进行粗校;
④如果引导天线满足跟踪条件,则在引导天线跟踪的条件下进行第二次快速校相。由于此时闭环跟踪船摇隔离效果比较好,所以校相值的精度会有所提高,称为精校值;
⑤第二次快速校相结束后,脱离引导天线跟踪,将精校值装订到引导跟踪接收机,同时通过方位、俯仰拉偏检查跟踪接收机相位,如果相位极性正确且交叉耦合满足指标要求(一般要求交叉耦合优于5∶1),则结束引导天线快速校相。
2.2.2 主天线的“粗校+精校”快速校相方法
主天线“粗校+精校”快速校相过程如下:
①当装有X频段信标的气球飞至离天线8km时,开始快速校相;
②首先通过脉冲雷达或光学设备的互引导跟踪目标,当引导天线发现目标之后转引导天线跟踪;
③在目标信号较为稳定的情况下对主跟踪接收机进行第一次快速校相,由于大小天线不平行度以及引导天线跟踪精度的影响,此时得到的校相值精度比较差,称为粗校值;
④将粗校值装订到主跟踪接收机,同时通过方位、俯仰拉偏检查接收机相位,如果相位极性正确且交叉耦合满足跟踪要求(即交叉耦合优于3∶1),则转主天线跟踪,否则返回第③步进行粗校;
⑤如果主天线满足跟踪条件,则在主天线跟踪的条件下进行第二次快速校相。此时的快速校相值将会有所提高,称为精校值;
⑥第二次快速校相结束后,脱离主天线跟踪,将精校值装订到主跟踪接收机,同时通过方位、俯仰拉偏检查接收机相位,如果相位极性正确且交叉耦合满足指标要求(一般要求交叉耦合优于5∶1),则结束主天线快速校相,否则返回第⑤步进行精校;
⑦继续跟踪信标球,检验跟踪性能。
2.3 跟踪校飞飞机或卫星进行快速校相
跟踪卫星进行快速校相的方法要求在轨道预报具有一定准确度的前提下,保证目标进入天线的主瓣波束以内,当目标角速度不大、角误差电压相对稳定时进行动态条件下校相。该方法将校相流程与实际任务相结合,在卫星处于低仰角时完成快速校相,省去了任务前对塔校相的过程,有利于提高测控设备的自动化标校水平。
针对船载UXB系统,在执行远距离运行段任务时通过跟踪卫星进行快速校相是可行的,但在执行近距离主动段卫星任务时,由于跟踪时间比较短,目标运动速度比较快,理论数字引导弹道误差大,加上船载UXB系统波束窄以及船摇的影响,跟踪卫星快速校相法是否可用还有待充分的试验验证。
若在设备安装后组织海上校飞,则在校飞过程中可反复进行跟踪校飞飞机快速校相的试验,以验证其可行性和精度,具体方法类似2.2节跟踪信标球快速校相法。
3 结束语
为了解决船载UXB系统海上校相的难题,经反复论证确定采用传统的码头校相数据差值记忆法和跟踪信标球快速校相法。传统的码头校相数据差值记忆法主要考虑的问题是如何满足远场条件以及环境的要求(避免外界的干扰以及多径效应),而跟踪信标球快速校相法需要在系统设计时具备在多种条件下(具体包括数字引导、雷达互引导、微光电视跟踪、小天线跟踪、主天线跟踪)进行快速校相的能力,并且在设备装船之后需要通过多次试验验证。
[1] 苏 勋,席文君,等.双通道跟踪接收机对地校相技术[J].电讯技术,2012,52(03):268~272.
[2] 李 蝉,刘 敏,于益农.深空测控系统中的射电星校相方法[J].飞行器测控学报,2009,28(6):28~30.
[3] 张爱成,桂勇胜,等.基于早期轨道任务的快速校相的实现[J].通信技术,2011,33(01):3~5.
[4] 李 珂,等.一种双通道角跟踪的快速校相方法[J].电讯技术,2007,47(06):99~101.
[5] 刘 冰,陆人佳,等.统一测控系统跟踪在轨目标自动校相方法研究[J].遥测遥控,2010,31(01):37~40,54.
A Fast Phase Calibration Method of the Shipboard Unified X-band System
Qu Yuanxin, Mao Nanping
To facilitate the antenna to track target automatically,the monopulse dual-channel tracking receiver must calibrate the phase inconsistency between the sum and difference channels.A fast phase calibration method has already been proposed,which is only applicable in ground tracking stations.This paper presents a fast phase calibration method which is iterative and includes rough calibration process and fine calibration process.The proposed method in this paper can effectively overcome the influences of ship rolling and limited accuracy of guide data,and it paves the way for the application of shipboard narrow-beam antenna.
Shipboard unified X-band system; Angle calibration; Fast phase calibration
TN850
A
CN11-1780(2014)02-0069-04
2013-02-27 收修改稿日期:2013-04-07
瞿元新 1970年生,硕士研究生,研究员,主要从事海上无线电测控设备总体工作。
毛南平 1970年生,高级工程师,主要从事海上航天测控工作。
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
科学技术创新(2021年11期)2021-05-25 10:04:18
电子制作(2019年7期)2019-04-25 13:17:42
电子测试(2018年22期)2018-12-19 05:12:58
宇航计测技术(2018年3期)2018-09-08 02:21:32
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
