西气东输香港支线铺管船铺管作业锚泊方案分析
2014-08-02 03:56李陈峰任慧龙
舰船科学技术 2014年11期
李陈峰,任慧龙,曾 骥,汪 蔷
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
西气东输香港支线铺管船铺管作业锚泊方案分析
李陈峰,任慧龙,曾 骥,汪 蔷
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
铺管船在海上敷设海底管道是动态的并且非常复杂的过程,为了合理分析铺管船锚泊方案,基于Ansys-AQWA软件,考虑风载荷、流载荷、波浪载荷等因素,对铺管船与锚泊系统进行耦合时域分析,给出了针对多点定位系泊系统海洋工程船的分析流程,而且从铺管船锚泊移位系统的强度校核结果、各项运动最大位移、操作简便性等方面评析铺管船作业锚泊方案,得出较优方案指导实际工程。结果表明,本文采取的方法具有工程应用性,评析结果可以作为实际工程的参考。
铺管船; 锚泊方案; Ansys-AQWA; 耦合分析; 时域
0 引 言
西气东输工程是目前我国投资最大的能源工程和基础建设工程。香港支线作为西气东输二线的重要组成部分,西起深圳的大铲岛,经海底敷设至香港龙鼓滩,路由穿越大铲、铜鼓和龙鼓三处水道。该支线管道近岸段采用拖拉法铺设,海上部分采用铺管船法铺设。对于铺管船法铺设,常用的定位方式主要有锚泊定位[1]和动力定位。其中,锚泊定位通过控制位移绞车收放锚链实现铺管船的移位,环境适应性好,且投资少、使用方便、可靠度高,在浅海区海管铺设中较常采用[2]。针对铺管船不断收放锚的作业特点,根据作业海区的海况和水文条件,确定各种锚链分布状态下的铺管船的运动响应与锚泊力具有重要的工程价值[3]。
国际关于海洋工程船多点定位系泊系统设计理念尚处在发展阶段,适合船舶工作特点、环境条件的规范标准很少。ABS,DNV,BV,CCS 等船级社的规范标准多针对永久性系泊系统。本文提出将动态的铺管过程简化为阶段性的静态布锚方式。铺管船的铺管行进过程是一个复杂的动态过程,此时锚链形式、铺管船位置时刻都在发生变化,但铺管船在铺管过程中移动非常缓慢,因此可将动态连续的锚泊移位系统分解成若干个运动阶段,每个运动阶段考虑其2种极端状况即初始锚泊状态与终止锚泊状态进行分析,计算各状态下铺管船运动响应以及各锚链锚泊力。
借助水动力软件AQWA中频域模块AQWA-LINE,采用三维势流理论,对西气东输二线香港支线铺管作业所使用的“中油海101”号铺管船进行数值计算,得到各个频率下的附加质量和阻尼系数,各个频率和浪向下的一阶、二阶传递函数等水动力参数,组成频域下的水动力参数数据库。利用水动力软件AQWA中的时域模块AQWA-DRIFT,对铺管船及其锚泊系统进行时域耦合数值模拟,模拟计算了在风浪流联合作用下,铺管船运动响应情况以及铺管船锚泊移位系统的安全性。同时本文针对特定航段提出不同的布锚方案进行比较分析,从而确定最佳布锚方案。
1 锚泊系统分析方法和相关理论
1.1 锚泊系统分析流程
铺管船在敷设海底管道过程中所使用锚泊移位系统是短时的移位系统,船的移位完全依靠船的8台移位绞车的收放锚绳及自动纠偏控制系统来完成。敷设一段海底管道后,会停止一段时间进行管道的安装工作,因此伴随着拔锚放锚的过程,移位和停船交替进行。敷设海底管道的过程中铺管船行进速度非常缓慢,可近似认为铺管船处于零航速状态。因此可将连续的锚泊移位系统分解成若干个离散的锚泊移位系统,然后对这些离散锚泊移位系统做时域动力分析[4]。
水动力软件AQWA通常用来计算海上长期作业的零航速大型浮体,本文将铺管船作业的动态过程简化为短期作业的零航速小型浮体,此时利用AQWA软件进行分析相对来说较为准确。首先对铺管船频域分析,求得幅频响应算子、附加质量、阻尼系数等参数以供时域分析使用。在时域模块中定义风力系数、流力系数、波浪参数等,进行铺管船与其锚泊系统耦合时域分析。进而可以得到不同布锚状态下的各锚链张力随时间变化曲线,锚链张力许用值根据《CCS海上移动平台入级与建造规范》[5]中对锚缆安全系数的规定,取为2.0,对其锚链张力最大值与许用值比较,进而分析锚泊系统安全性。本文选定最危险航道设计2种通过该航道的布锚方案,根据不同布锚方式下各锚链最大张力值的比较、各向最大位移的比较、以及操作的简便程度,分析出最佳布锚方案,应用于实际工程项目。
1.2 风载荷计算公式
《CCS海上平台入级与建造规范》中关于风载荷计算的公式为:
F=ChCsS×0.613×10-3V2。
(1)
式中:V为设计风速,m/s;S为平台在正浮或倾斜状态时,受风构件的正投影面积m2;Ch为受风构件的高度系数;Cs为受风构件的形状系数。
1.3 流载荷计算公式
海流载荷计算公式:

(2)
式中:CD为曳力系数;ρW为海水密度,kNs2/m4;V为设计海流流速,m/s;S为构件在与流速垂直平面上的投影面积,m2。
1.4 二阶波浪力


(3)
其中,Pij为同相位的时域传递作用部分,Qij为不同相位的时域传递作用部分。当忽略了频域的结果后可以得到:

(4)
纽曼近似条件为:

(5)

(6)
基于以上近似条件的式子可以写为:
(7)
其中,wi,wj为每一对波浪成分的频率;ai,aj为波浪成分的幅值;εi,εj为辐射相位角。
2 相关参数
2.1 铺管船基本参数
铺管船基本结构参数:总长123.78 m;垂线间长115.00 m;型宽32.20 m;型深6.50 m;设计吃水4.00 m;排水量14 539.30 t。
2.2 锚泊系统参数
铺管船锚泊系统使用钢芯钢丝绳,具体参数:重量集度18.10 kg/m;最小破断拉力356.78 t;弹性模量1.70E11 Pa;抗拉强度2 160 MPa。
2.3 路由介绍
西气东输二线香港支线是西气东输二线管道工程项目中的一部分,香港支线起于大铲岛末站,经海底敷设至香港龙鼓滩输气站。管线路由总长19 594 m,穿越大铲水道、铜鼓航道及龙鼓航道,总体路由示意图如图1所示。

图1 实际作业路由示意图Fig.1 Schematic diagram of operation route
2.4 海况参数
根据龙鼓航道段实际测得的最恶劣海况设定计算参数如表1所示,2种布锚方案均采用相同的海况参数进行计算,以便进行比对。

表1 龙鼓航道水文条件Tab.1 Hydrological condition of Longgu waterway
2.5 铺管船频域以及时域分析模型
图2 所示为“中油海101”铺管船进行频域和时域分析的湿表面网格模型,考虑计算的准确性,模型中将铺管船尾部的呆木一并建出,较为精准。

图2 铺管船频域分析湿表面网格Fig.2 Wet surface grid of pipe-laying vessel
3 锚泊方案制定
在铺管船进行铺管作业期间,不断拔锚抛锚实现铺管船前进铺管作业,此时会有1根或2根锚链拔起,并且在一段时间内被拔起的锚链对铺管船并没有起到保护作用。此时情况比较危险,因此考虑最危险状态即6根锚链作用于铺管船上的状态,设计出4种最危险的布锚状态,对不同的布锚状态进行铺管船与锚泊系统耦合时域分析。由于在非航道段进行铺管作业时,风浪流作用方向存在不确定性,因此分析时可将风浪流作用方向进行划分,由于铺管船存在对称性,因此考虑0°~180°每15°为间隔,并认为风浪流作用方向相同时对铺管船作用效果最严重,有义波高从0.15 m变化到1.2 m,风速由5.4 m/s变化到13.8 m/s。

图3 第1阶段布锚方式Fig.3 Mooring mode in the first stage

图4 第2阶段布锚方式Fig.4 Mooring mode in the second stage
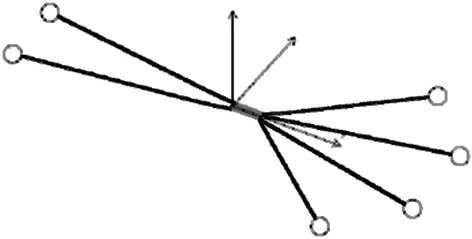
图5 第3阶段布锚方式Fig.5 Mooring mode in the third stage
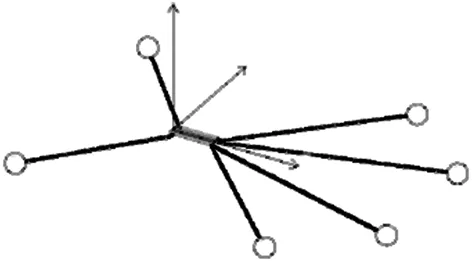
图6 第4阶段布锚方式Fig.6 Mooring mode in the fourth stage
铺管船在经过大铲水道、龙鼓航道、铜鼓航道段时,风浪流联合作用方向为90°,即横流和横浪状态,情况较为危险,龙鼓航道宽900 m,淤积粘土较为严重,不利于锚泊定位,因此本文主要以龙鼓航道段为研究对象,作业方提出2种通过龙鼓航道段的布锚方案,本文对2种布锚方案进行分析与比较,最终得到一种较好的布锚方案,作为实际工程项目中铺设龙鼓航道段的参考方案。
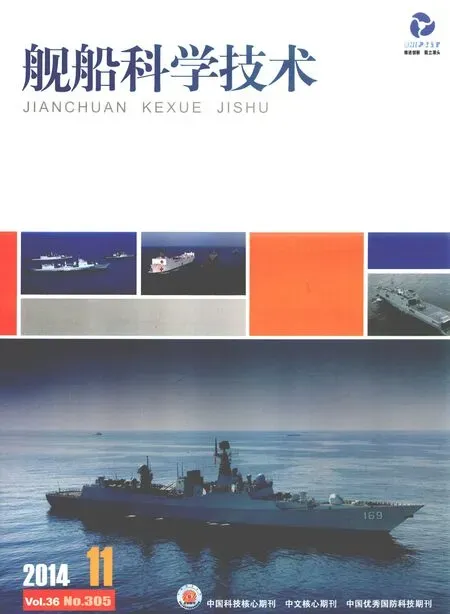
图7~图10为其中第1种通过龙鼓航道的布锚方案,分为8种布锚状态,其中将铺管船行进过程分为4个阶段,每个阶段中锚链长度较长或者较短时对于铺管船作业来说是较为危险的,因此每个阶段中的起始状态和终止状态为各阶段中最为极端的2个状态,因此需要分析每阶段的起始状态和终止状态。各阶段中,实线为起始状态,虚线为终止状态。
将该铺管船锚泊移位系统的锚链分为4组,从船首方向开始算起,2对称锚链算为一组。在第1阶段8根锚链位置确定好之后,铺管船一直进行铺管作业,期间并未进行拔锚放锚。
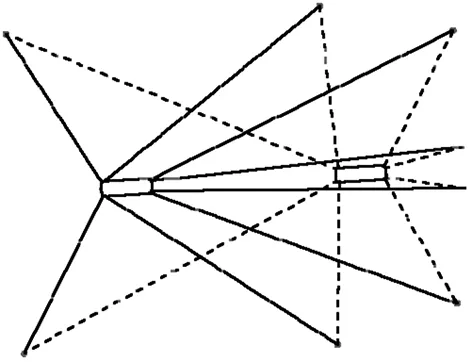
图7 布锚状态1和布锚状态2Fig.7 Mooring stage 1 and 2
第2阶段中随着铺管船行进,第3组锚链的位置已经移动到前方,同时铺管船继续前进。
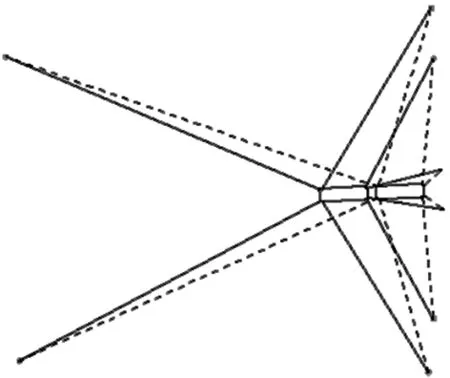
图8 布锚状态3和布锚状态4Fig.8 Mooring stage 3 and 4
第3阶段中铺管船处于零航速状态,开始进行后面2组锚链的移动,由于实际地理条件的限制,有的地方并不适合锚链的下放,因此会出现一组中2根锚链不对称的情况。同时将前面2组锚链抛向较远处,以便进行下一周期的铺管船的行进。

图9 布锚状态5和布锚状态6Fig.9 Mooring stage 5 and 6
随着铺管船向前移动,调整了不对称锚链的位置,最后一阶段中,初始状态是调整了锚链位置之后的锚泊状态,此后完全依靠前后锚链长度的变化实现铺管船的移动。

图10 布锚状态7和布锚状态8Fig.10 Mooring stage 7 and 8
图11~图12为第2种通过龙鼓航道的布锚方案,铺管作业过程中尽可能减少拔锚放锚次数,可以提高工作效率和日铺管公里数,因此第2种方案只需2个阶段就可以完整通过龙鼓航道,图11中在第1阶段并没有拔锚放锚的过程,完全依靠锚链长度变化实现铺管船的移动。
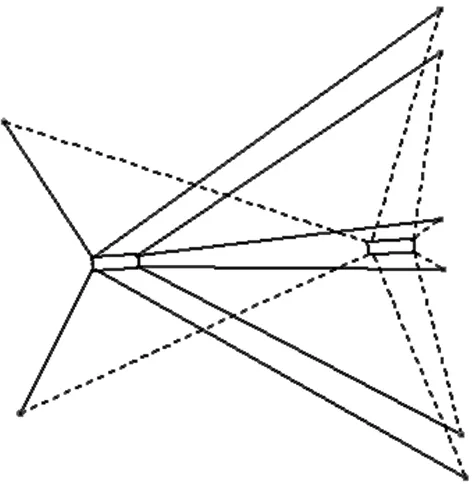
图11 布锚状态1和布锚状态2Fig.11 Mooring stage 1 and 2
在布锚状态2之后停船将锚链全部重新布置,因而第2阶段同样没有拔锚放锚,只依靠锚链长度变化实现铺管船的前进,此种方法拔锚放锚次数较少,效率较高。

图12 布锚状态3和布锚状态4Fig.12 Mooring stage 3 and 4
4 计算结果
4.1 风力系数和流力系数计算结果
通过对风力系数和流力系数的计算,得到风力系数和流力系数曲线,如图13和图14所示。

图13 风力系数曲线Fig.13 The curve of wind coefficient

图14 流力系数曲线Fig.14 The curve of current coefficient
4.2 布锚状态
根据实际布锚方案,在AQWA中建立铺管船和锚泊系统模型,每根锚链与铺管船所夹角度、定位位置,长度均与实际情况相符,图15为布锚方案2中布锚方式3在AQWA中计算模型示意图。

图15 布锚方案2中布锚方式3示意图Fig.15 Mooring mode 3 in scheme 2
4.3 锚链张力时历曲线
对铺管船和锚泊系统进行耦合时域分析,可以得到锚链张力随时间变化曲线,每种布锚状态以及各工况下均可得到各锚链张力时历曲线,可将模拟的整个时间段内的锚链张力最大值提取出来,进而进行锚链强度校核,如图16所示为锚链张力时历曲线。

图16 锚链张力随时间变化曲线Fig.16 The curve of cable tension change with time
4.4 两种方案计算结果
本文中“中油海101”铺管船所使用锚泊系统为钢芯钢丝绳,最小破断力356.78 t,取安全系数为2,因此许用张力值为178.39 t。表2和表3分别给出布锚方案1和方案2计算所得锚链张力最大值结果,其中灰色区域代表该状态下此锚链张力最大值超过许用值的情况。表5给出2种方案各向最大位移比较结果。

表2 布锚方案1锚链张力最大值计算结果(t)Tab.2 The maximum value of cable tension in mooring scheme 1

表3 布锚方案2锚链张力最大值计算结果(t)Tab.3 The maximum value of cable tension in mooring scheme 2

表4 两种布锚方案最大位移比较结果Tab.3 Comparison of maximum displacement in two schemes
4.5 两种方案比较分析
1)第1种布锚方案中,不断实现拔锚放锚的过程,操作较为复杂;第2种布锚方案中,拔锚放锚次数较少,操作方便简单,效率较高。
2)通过计算结果可知,第2种布锚方案明显好于第1种布锚方案,第1种布锚方案中的状态4中在最危险海况下锚链3出现锚链张力最大值,属于最危险情况,第2种布锚方案中也有较多锚链强度校核不满足规范要求的结果,但未出现锚链拉断的情况,因此如果在实际作业时采用第2种布锚方案,观察天气窗口选择连续较好天气,再同时利用拖轮辅助铺管船作业,作业较安全。
3)第1种布锚方案中,有3个布锚状态的铺管船正前方2根锚链长度较短,锚链长度较短则对铺管船起到的保护作用不大,而且非常容易被拉断,情况较为危险。
4)布锚方案2的各锚泊状态的最大位移值明显小于布锚方案1的各锚泊状态的最大位移值,因此布锚方案2较于布锚方案1具有明显优势。
5 结 语
1)理论上说,本文的计算方法可行,铺管船作业过程中铺管船与其锚泊系统耦合作用分析可采用本文提出的方法,分析流程简便。
2)本文提出的系泊方案的制定是有参考价值的,由于本文计算的工况为最恶劣海况,虽然有较多布锚方式下锚链张力最大值均超过许用值,但均未使锚链拉断。通常实际施工过程中会观察天气窗口,选较好的天气连续施工,同时采用拖轮辅助铺管船作业以及定位,情况较为安全。
3)本文提出的2种锚泊方案,从操作性来说,采用第2种方式较好,拔锚放锚过程较少,操作简便,效率更高。从安全性来说,也是采用第2种方式较好,各布锚方式下锚链张力最大值普遍小于第一种布锚方案中锚链张力最大值,作业更安全。
[1] 王铭铭.铺管船锚泊移位系统的分析及应用[D].大连:大连理工大学,2008.
[2] 罗晓健.浅水起重铺管船定位锚泊系统配置研究[J].中国海洋平台,2012,27(1):8-12.
[3] 盛庆武.3000 t铺管起重船铺管作业锚泊定位系统设计研究[J].船舶与海洋工程,2012(1):84-93.
[4] 张富明.铺管船的作业速度分析[J].上海造船,2010(2):56-59.
[5] 中国船级社.CCS海上平台入级与建造规范[M].北京:人民交通出版社,2005.
[6] 刘应中,缪国平,李宜乐,等.系泊系统动力分析的时域方法[J].上海交通大学学报,1997,33(11):7-12.
Analysis on mooring scheme of pipe-laying vessel in west-east gas transmission Hongkong branch
LI Chen-feng,REN Hui-long,ZENG Ji,WANG Qiang
(College of Ship Building Engineering, Harbin Engineering University, Harbin 150001,China)
The operation of pipe-laying vessel in subsea pipeline offshore installation is dynamic and complex process, in order to give the reasonable analysis of pipe laying vessel mooring scheme, based on the ANSYS-AQWA software, considering wind load, current load and wave load, the coupled analysis between pipe-laying vessel and mooring system is brought out in the time domain. According to the analysis process of multi-point positioning mooring system of marine engineering vessel is given, and take the strength assessment of mooring system, the maximum displacement of the movement on each direction, the simple operation into consideration to analysis the operating mooring scheme of pipe-laying vessel. According to the analysis results from this paper, the optimum scheme is obtained to guide the actual project. The results show that, the methods from this article has engineering application and analysis results can be used as a practical reference.
pipe-laying vessel; mooring scheme; Ansys-AQWA; coupled analysis; time domain
2013-08-05;
2013-09-09
李陈峰(1981-),男,讲师,博士,研究方向为环境载荷与结构强度。
U674.34
A
1672-7649(2014)11-0142-06
10.3404/j.issn.1672-7649.2014.11.029
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
船海工程(2021年6期)2021-12-17
哈尔滨工程大学学报(2021年10期)2021-11-05
船舶标准化工程师(2020年1期)2020-06-12
舰船科学技术(2020年3期)2020-04-22
军事运筹与系统工程(2019年4期)2019-09-11
船海工程(2019年3期)2019-07-03
宇航计测技术(2019年1期)2019-03-25
舰船科学技术(2018年8期)2018-09-02
雷达学报(2017年6期)2017-03-26