基于SimMechanics的牛头刨式平面六连杆机构运动学仿真*
2014-07-31 20:40屈文涛王亚娟
机械研究与应用 2014年1期
屈文涛,王亚娟, 邹 伟, 邵 乐
(1.西安石油大学 机械工程学院,陕西 西安 710065; 2.西安石油大学 石油工程学院,陕西 西安 710065)
基于SimMechanics的牛头刨式平面六连杆机构运动学仿真*
屈文涛1,王亚娟1, 邹 伟2, 邵 乐1
(1.西安石油大学 机械工程学院,陕西 西安 710065; 2.西安石油大学 石油工程学院,陕西 西安 710065)
为研究牛头刨式平面六连杆机构的运动学特性,利用SimMechanics搭建了运动学模型并对其仿真,得到了该机构中关键点滑块在驱动力作用下的瞬时位移、速度、加速度的运动曲线。仿真结果表明:运用该方法既无需数学建模与编程又能够快捷、准确、直观地显示机构的运动轨迹,是复杂平面连杆机构仿真分析较好的方法,能够为平面连杆机构的设计、优化和开发提供重要参考依据。
六连杆机构; 运动学; 仿真; SimMechanics
1 引 言
平面连杆机构运动学仿真是利用计算机仿真软件求解机构在所计时间域内的运动学方程,以此确定机构在连续运动过程中各个构件的位移、速度和加速度[1]。对于复杂机械,运用传统运动学和动力学的图解法和解析法求解数学模型困难,而Matlab/SimMechanics为平面连杆机构的运动学分析提供了仿真平台,运用此方法无需建立复杂的数学模型,只要根据连接关系即可搭建四杆、六杆、曲柄滑块等所有平面连杆机构的仿真框图,实现实时分析[2-3]。牛头刨式平面六连杆机构是由四杆机构和曲柄滑块机构组合而成的机构,对于普通的平面连杆机构或者曲柄滑块机构运用Matlab/SimMechanics建模比较简单,但是将四杆机构与曲柄滑块机构结合起来,尤其是对滑块机构大都无法直观正确的仿真出其模型。笔者基于Matlab/SimMechanics模块对牛头刨式平面六连杆机构进行运动学建模和运动学仿真。
2 机构数学模型的建立
图1为牛头刨式平面六连杆机构的运动简图,该机构由四连杆机构和曲柄滑块机构组合而成,其中曲柄AB为原动件,动力经过连杆、连架杆、摇杆最后由滑块输出,通过滑块的直线往复运动来实现机构的上下运动[4]。
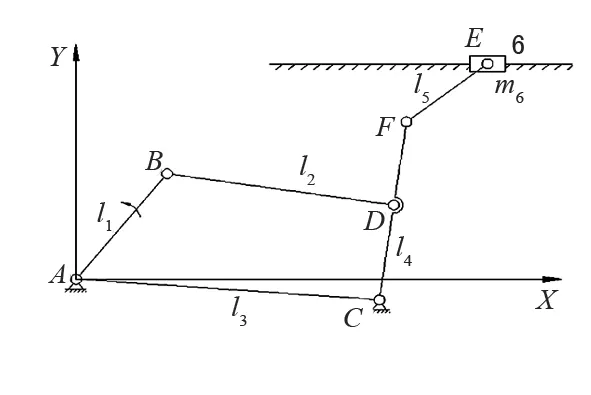
图1 六杆机构运动简图
运用闭环矢量法建立机构的闭环矢量约束方程:

(1)
(2)
将上述方程分解到直角坐标系中可得到4个位置约束方程,分别对位置约束方程关于时间t求一阶和二阶导数就可得到4个速度约束方程和4个加速度约束方程,此处由于篇幅限制求解过程略去。
3 机构仿真
3.1 SimMechanics仿真步骤
SimMechanic的仿真可参照以下步骤:①机构分析,根据机构特征选择单元所需模块或自定义模块并搭建系统;②参数设置,对刚体模块、铰接模块等模块设置杆长、质量转动惯量等参数;③根据驱动特性设置好驱动并设置仿真参数,进行仿真;④仿真输出,根据需要输出可视化模型及仿真结果。
3.2 仿真框图的搭建
根据图1机构的拓朴关系,着手搭建仿真模型框图, 从刚体模块组(Bodies)中选择Ground模块和Machine Environment模块分别构造机架和定义机械环境变量,从运动铰接模块组(Joints)选择Revolute模块构造转动副A,接着再从刚体模块组(Bodies)中选择Body模块表示曲柄AB,依此类推,对于杆件与滑块均需选用Body模块,根据铰接关系选择转动Revolute模块和移动Prismatic模块,放置到合适的位置依此连接起来即可,最后添加驱动模块(如图5所示)即可以完成整个机构仿真模块的搭建(如图2所示)。对于本机构,搭建仿真模型的难点在于D处的搭接(如图3所示)以及滑块6的参数设置(如图4所示)。
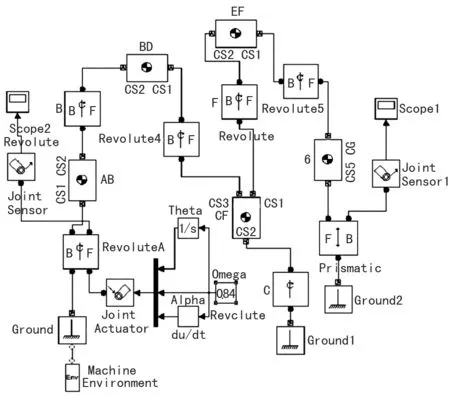
图2 六杆机构的SimMechanics仿真模型
3.3 控制参数的设定
依据图2,根据各模块要求设置相关参数,机架杆AC长度为1.65 m,曲柄转角为90°, 固定坐标为点A(0,0,0)、C(1.52,-0.66,0),机构中各尺寸分别为(单位:m):l1=0.42 m,l2=1.52 m,l4=0.84 m,l4′=2 m,l5=1.16 m;各构件质心分为:rc1=0.21,rc2=0.76,rc4=0.42,rc5=0.58为杆的对称中心;构件的质量为(单位:kg):m1=10.36,m2=53.95,m4=83.31,m5=56.04,m6=2.64;各构件转动惯量为(单位:kgm2):J1=0.052,J2=0.388,J4=0.703,J5=0.049,J6=0.03。
注意:转动惯量的输入应按照矩阵的形式输入(如图3)。另外对于滑块模型的设置亦是一个难点,该文经过探索得出滑块的设置方法(如图4)。
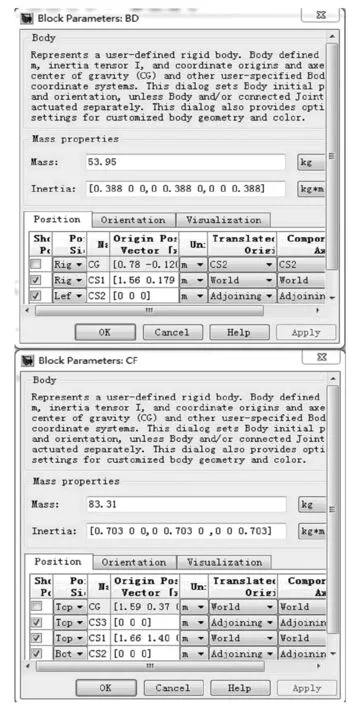
图3 D点参数设置

图4 滑块的参数设置
3.4 驱动搭建与仿真
驱动搭建是通过在铰接处(RevoluteA)添加力或力矩(Joint Actuator)达到驱动的目的,驱动搭建的模块如图5所示。

图5 六杆机构驱动控制模块
3.5 仿真结果及验证
仿真系统求解器可以采用变步长的四阶龙格-库塔法;步长选择为Auto,绝对误差为10-6,相对误差为10-3,曲柄AB以等角速度ω=0.84 rad/s,周期T=7.5 s,故设置仿真时间是7.5 s,时间步长为0.02 s,借助虚拟显示工具箱可以实现整个机构的动画演示,结果如图6所示。
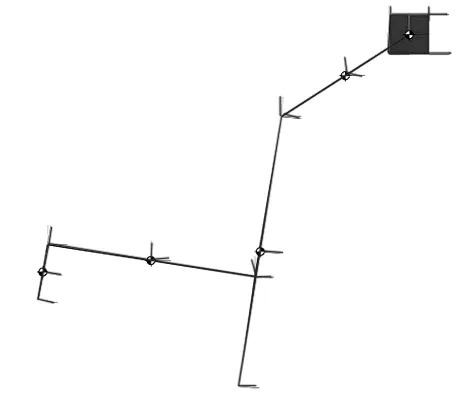
图6 机构动画显示
仿真结果可以通过示波器实时显示,也可以通过绘图命令调用绘图,而后一种方法灵活多样,容易调用输出。该文正是采用示波器观察与绘图命令输出结果相结合的方式查看滑块的运动轨迹。图7为滑块的角位移、角速度及角加速度的随时间变化的特性曲线,以及曲柄的扭矩图。从图中可以看出,滑块的运动规律接近简谐运动,当位移达到最大时,加速度达到反向最大,而速度为零。曲柄在一个周期内的下行程结束上行程开始之际(位移曲线反映在5~6 s的持续抖动)实际上是由连杆机构在旋转过程中曲柄连杆转动但并未带动滑块运动造成的。曲柄扭矩曲线随着时间的变化而变化,在发生急回的地方扭矩达到最大值。
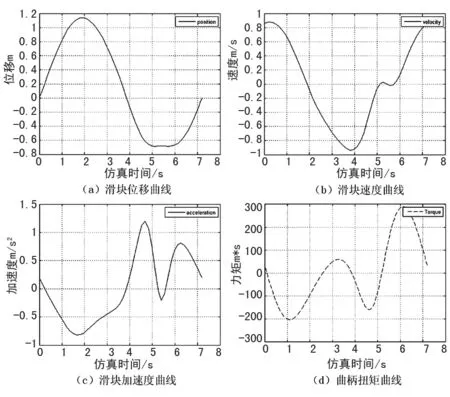
图7 仿真结果
4 结 论
(1) 该文基于SimMechanics对牛头刨式平面六连杆机构进行运动学仿真分析,给出机构所需的仿真结果及曲线,通过运动学仿真验证了模型的正确性。
(2) 运用SimMechanics对机构系统进行建模仿真,避免了建立复杂数学模型的过程,只需根据构件间的相互连接关系,即可搭建机构相应的物理模型并设置好相关参数,实时得到机构的运动规律。并且参数可以在线修改、动态观测,为下一步系统优化设计奠定了基础。
(3) 研究表明,将SimMechanics应用到机械系统,尤其是比较复杂的多杆机构设计与分析中,不仅可以获取所需的各类参数,而且能提高产品的开发效率并节约成本,是一种行之有效的仿真方法。
[1] 约翰·F·德纳.周进熊,张陵(译).机构动态分析——使用MATLAB和SIMULINK[M].西安:西安交通大学出版社,2002.
[2] 时黎霞.基于SimMechanics的一种六连杆机构运动学仿真[J].长春理工大学学报(自然科学版),2007,30(4):49-51.
[3] 徐梓斌. 六杆机构运动学仿真的MATLAB实现[J].煤矿机械,2006,27(4):617-618.
[4] 屈文涛,陈 英,秦彦斌,等. 牛头刨式平面六连杆抽油机运动特性分析[J].石油机械,2011,39(3):28-30.
Kinematic Simulation of Six-Bar Mechanism of Shaping Based on SimMechanics
QU Wen-tao1, WANG Ya-juan1, ZOU Wei2, SHAO Le1
(1.MachenicalEngineeringCollege,Xi′anShiyouUniversity,Xi′anShaanxi710065,China;2.CollegeofPetroleumEngineering,Xi′anShiyouUniversity,Xi′anShaanxi710065,China)
In order to research kinematical simulation characteristic of six -bar mechanism of shaping, a kinematical model is given to simulate based on SimMechanics, motion curves of instantaneous displacement, velocity and acceleration of key point sliding block among the mechanism is obtained under the action of a driving force. The simulation result shows that such kind of method can display motion track of the six-bar mechanism quickly,exactly and directly without mathematical model of mechanism kinematical and program, which is an excellent choice for complex mechanism to simulate. Meanwhile kinematical simulation of mechanism based on SimMechanics is also a major method to design, optimize and develop.
six-bar mechanism; kinematics; simulation; SimMechanics
2013-12-17
屈文涛(1970-),男,山东临邑人,教授,主要从事机械设计的科研和教学工作。
TJ765.4
A
1007-4414(2014)01-0039-03
猜你喜欢
机械工程师(2021年4期)2021-04-19
河北省科学院学报(2020年1期)2020-05-25
设备管理与维修(2019年22期)2019-12-19
制造技术与机床(2018年11期)2018-11-23
机械研究与应用(2018年5期)2018-11-05
海军航空大学学报(2015年1期)2015-11-11
中国塑料(2015年9期)2015-10-14
河南科技(2015年2期)2015-02-27
机械制造与自动化(2014年1期)2014-03-01
河南科技(2014年6期)2014-02-27