国产北斗接收机质量分析与发展现状
2014-07-25 05:17:52潘国富鲍志雄谭羽安
导航定位学报 2014年2期
潘国富,鲍志雄,谭羽安
(广州中海达卫星导航技术股份有限公司,广州 511400)
1 引言
2012年中国北斗卫星导航系统(BeiDou satellite navigation system,BDS)空间接口控制文件(interface control document,ICD)公布,再次引发了国内外北斗接收机的研制热潮,业内不同厂家分别上市了测量级和导航级的北斗芯片或终端设备。北斗系统的上线引发了一系列相关软件的算法升级,包括单点定位(single point positioning,SPP)、静态后处理软件、实时动态差分(real-time kinematic,RTK)、精密单点定位(precise point positioning,PPP)。这些算法升级的基础需要对BDS的信号质量进行检查分析,同时也需要对北斗接收机的信号质量进行分析。
本文将介绍自主研发的BDS卫星数据质量分析软件的指标概念及计算方法,利用自主开发的软件对国内外典型的接收机数据样本进行分析与对比,从而评估国产接收机的发展状况。
2 北斗接收机数据质量分析软件的研制
美国卫星导航系统与地壳形变观测研究大学组织(UNAVCO)开发的全球卫星导航系统(global navigation satellite system,GNSS)数据预处理软件(translation,editing and quality checking,TEQC)是测绘领域专业人士普遍使用的对GPS/GLONASS卫星数据进行质量检查的工具软件[1],该软件主要从数据完整性、多路径干扰、跳变比、以及电离层延迟跳变这四个指标来评判接收机数据质量。国外一些接收机厂家也开发了专门的质量分析软件,商品化程度较高,但是使用上有限制。因此有必要自主研发一款BDS数据质量分析软件。
一般来说,接收机的数据质量指标可以体现在数据完整性、多路径干扰、电离层影响几个方面,下面将一一介绍。
2.1 数据完整性
数据完整性指标反映测段中数据的可用性与完好性,数据完整性不仅体现了接收机的优劣,同时也反映了观测环境的好坏。

将数据完整性记为dataIntegrity,其定义为式中,P为理论上可能的观测值数量,C为合格观测值的数量。
所谓合格观测值定义为:某个历元的一颗星观测值同时具有P1或者C/A码数据、P2或者C2码数据、L1和L2载波相位数据,同时,L1和L2的SNR大于或等于指定的最小值。
如果某颗卫星在某历元有观测值,但由于不满足完整观测值的定义,应予以删除,其数量记为D;卫星高度角在截止高度角以上,但却没有观测数据,即该颗卫星失锁了,其数量记为M;另外,接收机可能会出现丢失历元的情况,把丢失历元观测量数目记为E,这些量满足

影响到数据的完整性原因有多种,如障碍物遮挡、干扰、卫星失锁、接收机内部问题或者是通信崩溃[2]。
2.2 多路径干扰
多路径干扰指标(Multipath,MP)主要受观测环境影响,同时接收机内部工作机理与多路径效应的产生是密不可分的[3],因此,对多路径效应的抑制性能也成了衡量接收机质量的一个指标。多路径效应存在周期性,同时具有随机噪声的特征,因为它与噪声无法完全区分开,因此本文说的多路径干扰包含了多路径效应与噪声。
根据文献 [4],多路径效应对伪距测量的影响要严重得多,因此本文不考虑相位观测多路径效应,伪距测量观测方程和载波相位测量观测方程可写为

式中,A=40.3∫sNedS,Ne为电子密度,dS为距离变化量,ρ是卫星至接收机的距离与所有与频率无关的偏差改正项之和,ρCA、ρP1、ρP2是伪距观测值,φ1、φ2是双频载波相位观测值,MP1、MP2是双频伪距多路径效应,εCA、εP1、εP2分别为CA码、P1码、P2码的噪声,f1、f2分别是L1载波和L2载波频率,N1、N2分别是L1与L2相位观测值的整周模糊度。
由式(3)可以推导出多路径与噪声的计算方程为
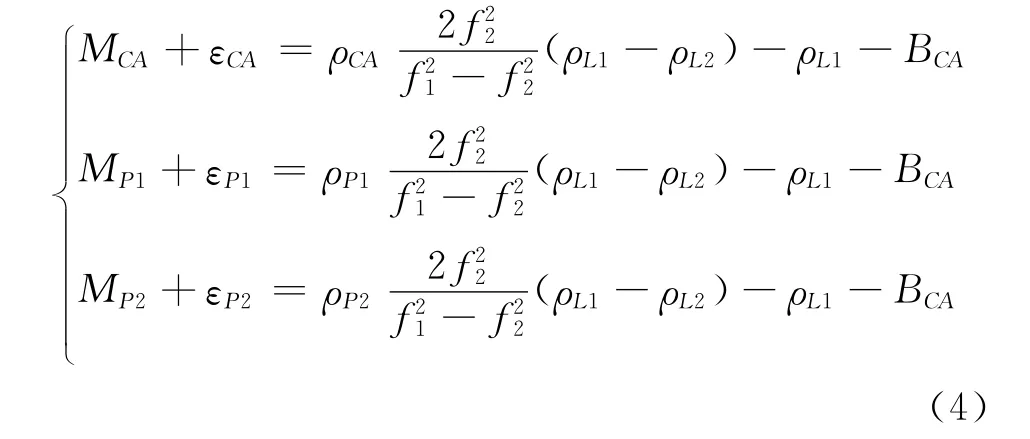
式中,ρL1、ρL2是双频载波相位观测距离,BCA、BP1、BP2为
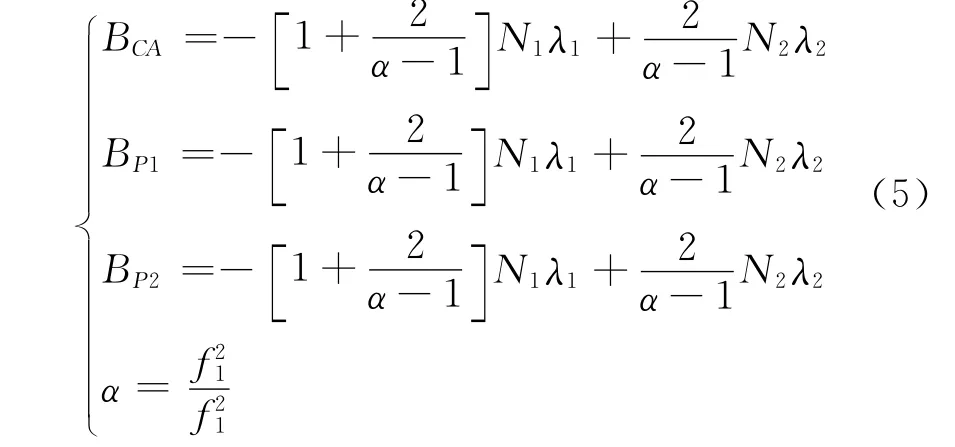
式中,λ1、λ2是波长。
在不发生周跳和钟跳的情况下,BCA、BP1、BP2为固定值,可见求出多路径的真实量需要先求出整周模糊度,由于整周模糊度的确定计算量较大,可以采用求差方法消除模糊度的影响并且不影响多路径值的均方根(root mean square,RMS)特征提取:由于目前典型的接收机都满足硬件延迟具有总体的线性特性,相干或非相干跟踪DLL具有零对称性[5],因此,计算伪距的多路径值可考虑使用移动平均法[6]。
2.3 多路径跳变比
跳变比(observations per slip,O/Slps)显示出数据发生跳变的频率,在MP序列中,严重偏离群体的异常值称为多路径跳变(Slips),由于 MP的计算公式使用了伪距、L1、L2观测值,这些值的跳变都会引起MP的跳变,因此多路径系列的跳变也反映了相位观测值上的周跳与伪距距观测值的多路径影响[7]。判定是否存在跳变需要阈值,阈值确定方法为

其中,sThreshold为阈值,eRms为 MP序列的期望均方根,RMS为MP序列的实际均方根,factor为跳变探测的敏感系数。
在移动平滑过程中,记录前N个历元MP的均方根RMS与平均值(记为floatmean),当前历元的MP变化值(记为residual)为

如果residual大于slipThreshold,则当前历元被判定为多路径跳变,即

当发生跳变后,本文使用了一个简单但有效的处理方法:用当前历元的绝对多路径值覆盖窗口中所有历元的绝对多路径值,使用这些新值进行下一个历元的计算。
2.4 电离层延迟跳变
根据文献 [5]推导的电离层延迟跳变(ionospheric delay slips,IOD slips)理论,两个频率的电离层延迟之间存在关系

假设两个频率的载波在对流层中的传播路径相同,则有

定义电离层变化率为
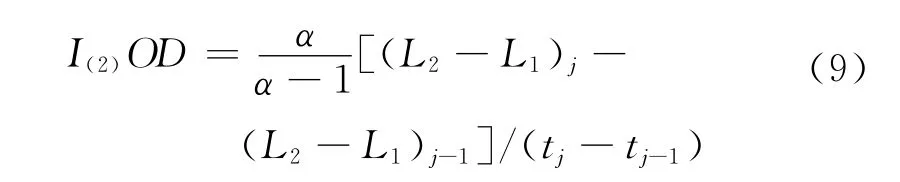
定义abIon为绝对电离层延迟量,即根据公式(7)及式(8)计算出来的电离层延迟,reIon为参考电离层延迟量,deltaT为前后两个历元间的时间间隔,ion为相对电离层延迟量,iod为电离层变化率,它们之间的关系为

电离层跳变的判定条件

对于参考延迟量reIon的确定,本文经过试验确定了一个可靠的方法:首先选取第一个历元的绝对电离层延迟量作为reIon,当发生跳变后,reIon就被设置为跳变历元的绝对电离层延迟量,当发生数据缺口时,reIon被置为当前历元的绝对电离层延迟量。
3 接收机数据样本分析
3.1 实时动态差分接收机对比
本文选择了三种在市场上具有代表性的RTK接收机进行对比。包括中海达V30接收机、国外某著名厂家最新RTK接收机(以下简称X10)、海星达H32接收机。其中X10主机代表了业内最高制造水平。
测试于2013-08-08在广州番禺天安科技园内进行,静态采样间隔1s,连续采集了5h后导出静态数据进行数据格式转换及分析。
本文分别分析单GPS和单BDS的数据质量,并分别进行高度截止角为10°和15°的分析。结果如表1~表4所示。
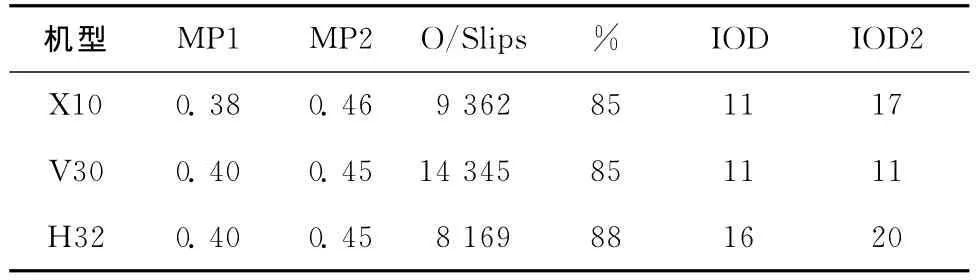
表1 三种RTK测量接收机质检结果比较(10°截止角,单 GPS)

表2 三种RTK测量接收机质检结果比较(10°截止角,单BDS)

表3 三种RTK测量接收机质检结果比较(15°截止角,单 GPS)

表4 三种RTK测量接收机质检结果比较(15°截止角,单BDS)
从表1~表4可以看出:
1)国产V30和H32接收机的单GPS数据质量没有明显区别,原因是这两款接收机使用了相同的OEM主板。
2)BDS信号比GPS信号在多路径和有效率两个指标上质量更高,原因可能是BDS B1/B2信号要比GPS L1/L2信号更加容易捕获解调。
3)BDS和GPS系统均表现出15°以上卫星要比10°以上的卫星数据质量更高,说明10~15°的卫星信号质量相对难以捕获,质量相对较低。
4)进口的X10接收机的单GPS数据质量与国产接收机没有明显区别,原因是这两款国产接收机使用了同一的OEM主板。
以上测试过程避免了点位环境,天气条件,可见卫星的不同导致的质量差异,可以一定反映出接收机的相对质量水平。
3.2 大地测量型接收机对比
文本从实际建成的多个连续运行卫星定位服务综合系统(continuous operational reference system,CORS)中收集到了三种市场上具有代表性的大地测量型接收机数据样本进行对比分析。分别是中海达VNet6三星接收机、国外某著名厂家最新基站型接收机(以下简称X9)、和芯星通UB370接收机。
数据采集地点分别位于不同地点,于不同时间采集,采样间隔为30s,采样时间24h。由于大地测量型接收机一般安装在观测条件较好的位置并且使用扼流圈天线,因此一定程度上可以忽略地理环境不同造成的影响。
本文分别分析单GPS和单BDS的数据质量,并分别进行高度截止角为10°和15°的分析。结果如表5~表8所示。

表5 三种大地测量型接收机质检结果比较(10°截止角,单 GPS)
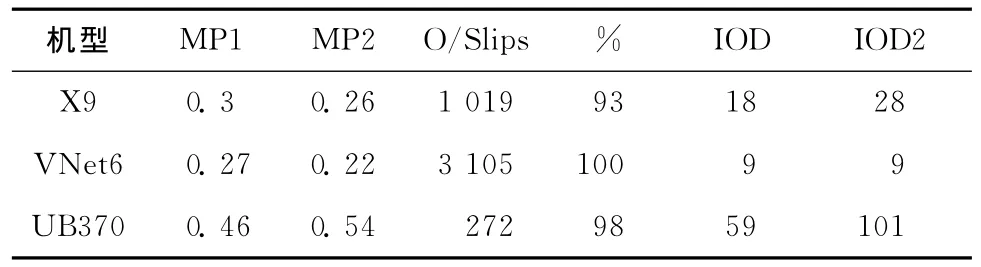
表6 三种大地测量型接收机质检结果比较(10°截止角,单BDS)
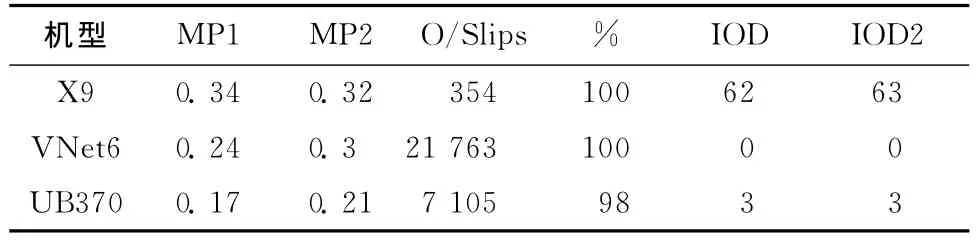
表7 三种大地测量型接收机质检结果比较(15°截止角,单 GPS)

表8 三种大地测量型接收机质检结果比较(15°截止角,单BDS)
从表5~表8可以看出:
1)对GPS信号,VNet6接收机信号质量最好,各种指标均为最佳。
2)进口的X9接收机各项指标均弱于国产接收机,这可能是由于天线匹配和地域因素造成的。
3)以进口的X9接收机作为标杆,国产VNet6接收机完全满足大地测量型接收机的技术指标要求。
4 结束语
本文概述了GPS及分析BDS数据质量的指标计算方法,经过大量实际数据样本的验证,自主软件计算出的结果与TEQC软件结果一致性较好,数据完整性、跳变比、电离层延迟跳变三个指标已经与TEQC软件一致,多路径效应指标也达到了90%的相似水平。运用本文算法对RTK型接收机及大地测量型接收机数据质量进行了对比分析,实际结果表明:
1)一般观测环境下,国产接收机在接收BDS信号方面的能力已经达到国外厂家的水准。
2)国产接收机在接收低仰角GPS L2信号的能力上还需要进一步提高。
本文相关算法已集成到中海达静态数据处理软件HGO中,运用到了国产卫星接收机的质检、天线及主板选型、三星CORS系统选点分析等场合。
[1]范晓燕,周乾.TEQC在 GPS数据分析及多路径效应中的应用研究[J].测绘信息与工程,2011,36(3):16-19.
[2]杨剑,王泽民,王贵文,等.GPS接收机钟跳的研究[J].大地测量与地球动力学,2007,27(3):123-127.
[3]李国伟,郭金运,原永东,等.GPS测站多路径效应建模研究[J].测绘科学,2013,38(3):7-9.
[4]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社.2005:71-74.
[5]夏林元.GPS观测值中的多路径效应理论研究及数值结果[D].武汉:武汉大学,2001.
[6]陈亮亮,郭杭,吴代赦.移动平均法用于 GPS多路径效应的分析[J].工程勘察,2008(3):57-61.
[7]黄爱萱,吴云,童小华.利用 GPS组合观测值探测修复周跳的方法比较[J].测绘工程,2007,16(4):25-29.
[8]ESTEY L H,MEERTENS C M.TEQC:The Multi-purpose Toolkit for GPS/GLONASS Data[J].GPS Solutions.1999,3(1):42-49.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
中国交通信息化(2019年2期)2019-03-25 03:20:16
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
地球(2016年10期)2016-04-14 21:07:54
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38
中国交通信息化(2015年10期)2015-06-06 06:39:32
发明与创新(2015年37期)2015-02-27 10:40:24
华东理工大学学报(自然科学版)(2014年1期)2014-02-27 13:48:36