
基于多新息理论的PID神经网络改进算法
2014-07-23 01:37孙敏敏秦品乐
网络安全技术与应用 2014年2期
孙敏敏 秦品乐
(中北大学计算机与控制工程学院 山西 030051)
0 引言
文[1]将PID控制与神经网络结合,提出了PID神经网络,PID神经网络具有PID控制规律,与传统的前向神经网络相比具有神经元的输入输出呈现出动态性,原因在于往神经网络中引入了比例(P)、积分(I)、微分(D)神经元。PID神经网络同时具备传统前向神经网络逼近任意非线性函数的特性,能够进行非线性,动态复杂系统的辨识与控制。文[2]采用BP算法的批处理模式进行神经元网络权值的调整,不便于系统实时辨识和控制,受文[3]的启发,采用BP算法的在线模式进行权重值的修正进行系统辨识,这为本文将多新息辨识算法引入PID神经网络做了准备。PID神经网络采用传统的BP算法的批处理模式进行权值的修正,从辨识的精度上考虑,批处理法拟合系统实际输入输出的效果优于在线模式,但从实时辨识与控制角度考虑,在线模式优于批处理法。在线模式对权值的修正值利用了系统当前的输入输出数据,没有利用历史的输入输出数据,坏数据对网络权值修正的影响大。丁锋等人提出的多新息辨识方法利用当前与历史输入输出数据,能减小坏数据的影响,提高系统辨识的精度。受文[4]启发,本文将多新息辨识方法引入PID神经网络,提出基于PID神经网络的多新息学习算法并给出了收敛性证明,仿真实例说明能取得较好的效果。
1 PID神经网络多新息学习算法
考虑1+−pt到t时刻的p组输入输出数据,PID神经网络输入层各节点的输出向量为

输出层节点的输出向量为

理想输出向量为

误差函数变为

那么,PID神经网络的隐含层至输出层权值修改式为

网络的输入层至隐含层权值修改式为

从而有隐含层至输出层权值修改式为

输出层至隐含层权值调整式为

2 仿真实例
为了说明所提出的基于PID神经网络的多新息学习算法的有效性,在和PID神经网络采用的标准BP算法进行比较时,采用文献[7]中的例子。
例1.考虑下面方程描述的非线性动态系统

其中)(ty为t时刻系统输出,)(tu为t时刻系统输入。

输入函数为

网络采用在线梯度法,每个学习回合采集200个样本点进行学习和训练,输入层至隐含层权值矩阵的初始值为W(0)=[1,0.1,1;−1,−0.1,−1],隐含层至输出层权值向量的初始值为V(0)=(0.1,0.1,0.1),其中y(t)为网络理想输出,d(t)为网络实际输出。取新息长度p=2,学习率η=0.175,当网络学习和训练20步后,改进算法与未改进算法的辨识结果如图1和图2所示。
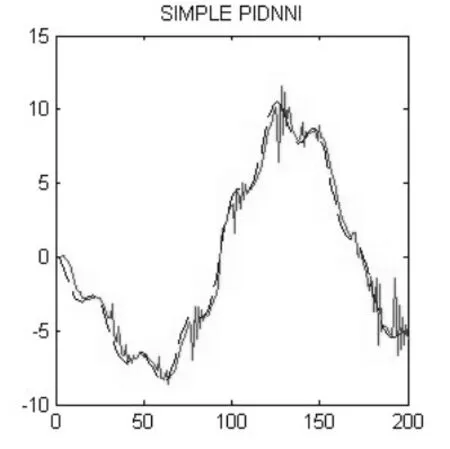
图1 未改进算法的辨识结果
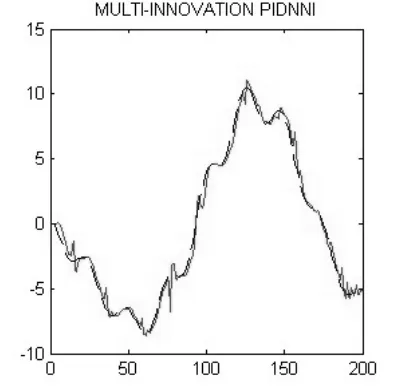
图2 改进算法的辨识结果
3 结语
结合多新息辨识理论,推导出基于多新息理论的PID神经网络算法。仿真实例表明所提出的算法能有效估计参数,且具有较快的收敛速度。
[1]舒怀林.PID控制与神经网络的结合及PID神经网络非线性控制系统[M].第十九届中国控制会议论文集(二),2000:228-332
[2]舒怀林.PID神经元网络及其控制系统[M].北京:国防工业出版社,2006:23-51
[3]许少云.BP学习算法的在线模式与批处理模式[M].1996年中国智能自动化学术会议论文(上册),1996
[4]刘英玉.一种基于前向神经网络的多新息随机梯度算法[J].哈尔滨商业大学学报(自然科学版)2006,22(2)
[5]Feng Ding,Tongwen Chen.Performance analysis of multi-innovation gradient type identification methods.2009,43(1):1-14
[6]郭雷.时变随机系统-稳定性、估计与控制.长春:吉林科学技术出版社,1993
[7]舒怀林.PID神经网络及其非线性动态系统辨识能力分析[J].自动化与信息工程
猜你喜欢
黑龙江电力(2022年5期)2023-01-10
青岛科技大学学报(自然科学版)(2021年6期)2021-12-17
青岛科技大学学报(自然科学版)(2021年4期)2021-07-26
科学导报·学术(2020年84期)2020-11-08
装备制造技术(2019年12期)2019-12-25
铁道通信信号(2019年3期)2019-04-25
校园英语·中旬(2017年10期)2017-11-20
网络安全和信息化(2017年12期)2017-11-08
电脑爱好者(2017年18期)2017-11-03
吉林省教育学院学报(2017年3期)2017-05-31
