基于转矩滞环结构优化的零电压矢量作用分析*
2014-07-18 11:56崔皆凡王鸿雪
组合机床与自动化加工技术 2014年4期
崔皆凡,王鸿雪,秦 超
(沈阳工业大学 电气工程学院,沈阳 110870)
基于转矩滞环结构优化的零电压矢量作用分析*
崔皆凡,王鸿雪,秦 超
(沈阳工业大学 电气工程学院,沈阳 110870)
为了提高永磁同步电机直接转矩控制在高速加工中心、精密磨床等场合的控制性能,从零电压矢量的作用原理入手,深入的分析了永磁同步电机直接转矩控制系统中零电压矢量的作用以及转矩滞环比较器结构的改变对转矩波动的影响。与传统转矩滞环比较器相比,采用滞环宽度优化的转矩滞环比较器,通过合理添加零电压矢量,使转矩波动明显减小。利用Matlab仿真平台,证明了转矩滞环宽度相同时,系统速度越低转矩波动越小。在系统速度相同时,转矩滞环比较器滞环宽度越大转矩波动越小。
永磁同步电机;直接转矩控制;零电压矢量;转矩滞环比较器
0 引言
直接转矩控制方法控制简单,转矩响应快,动态性能好。鉴于直接转矩控制在异步电机上的优异表现,一些学者致力于在同步电动机上的应用这种控制方式。因此永磁同步电机直接转矩控制就逐渐被广泛应用在高速加工中心、精密磨床等场合。很多人致力于改进永磁同步电机直接转矩控制系统的各项性能。而如何减小永磁同步电机直接转矩控制系统中的转矩波动问题更是成为热点之一[1-3]。在是否应该使用零电压矢量的问题上,文献[4]提出,永磁同步电机不同于感应电机,定转子磁链间没有转差,因此早期的直接转矩控制方式明确指出在永磁同步电机的直接转矩控制中,不能使用零电压矢量。而文献[5]指出零电压矢量在永磁同步电机直接转矩控制系统中有保持转矩的作用,提倡使用零电压矢量。文献[6]认为,当永磁同步电机直接转矩控制系统处于制动状态时,施加零电压矢量会引起系统失控,提出要合理谨慎的使用零电压矢量。文献[7]认为,零电压矢量实际上是起到减小转矩的作用。而文献[8]认为零电压矢量有保持转矩不变的功能,从而可有效抑制磁链、转矩等波动。以上文献都没有站在转矩滞环比较器结构的角度探讨零电压矢量的应用问题。在直接转矩控制中,零电压矢量的添加与转矩滞环比较器的结构有着一一对应的关系。所以本文在永磁同步电机直接转矩控制系统中,在转矩滞环比较器结构优化的基础之上对零电压矢量的作用展开深入的研究。
1 转矩波动的产生原理
由文献[8]可知,面装式永磁同步电机直接转矩控制中转矩的公式为:
(1)
式中:Ld为d轴电感;ψf为永磁体磁链,ψs为定子全磁链,p为极对数,Te为电磁转矩,δ为功角,是定子磁链和永磁体磁链之间的夹角。
由式(1)对时间t求导,可知在极微小的Δt时间内,转矩的增量是由功角的增量所引起的。
(2)
仔细研究式(2),发现功角的增量有如式(3)、(4)、(5)的关系:
Δδs=ωsΔt
(3)
Δδr=ωrΔt
(4)
Δδ=Δδs-Δδr
(5)
功角的增量Δδ就是定子磁链在Δt时间内的角度增量Δδs和永磁体磁链在Δt时间内的角度的增量Δδr的差值,ωs、ωr分别是定子和转子的角速度。若忽略定子电阻,则可以用式(6)、(7)得到Δδs。us为Δt时间内,要实现定子磁链变化的预期电压矢量。
Δψs=usΔt
(6)
(7)
同时可以由式(8)得到Δδr。
Δδr=ωrΔt
(8)
(9)
当零电压矢量作用时,us=0,那么Δδs=0,所以得到:
Δδ=-Δδr=-ωrΔt
(10)
那么在零电压矢量作用期间功角的增量就只与转子的角速度和Δt的乘积有关,速度与Δt的乘积较小,转矩波动就相对小。
2 滞环结构与零电压矢量添加方式
根据直接转矩控制系统中转矩滞环比较器的作用原理,可用一个平面直角坐标系来表示滞环比较器的结构。以给定转矩和实际转矩的差值ΔTe为自变量X,纵坐标为滞环比较器的输出值Y,当Y= 1时,系统需要使用有效电压矢量增大转矩,当Y= -1时系统需要使用有效电压矢量减小转矩,当Y= 0时系统需要使用零电压矢量保持转矩。
不同的转矩滞环比较器的结构,零电压矢量的添加方式就有很大的不同,传统的滞环比较器如图1所示。

图1 传统转矩滞环比较器
传统滞环比较器的作用过程是这样的,随着X值不断减小,从X> 1的位置一直减小到X= 0的位置,Y= 1。随着X继续减小从X= 0到X= -1的过程中Y= 0,就是使用了零电压矢量。同理从X< -1的位置一直增大到X= 0的位置,Y= -1。随着X继续增大从X= 0到X= 1的过程中Y= 0,就是使用了零电压矢量。
改进的转矩滞环比较器的结构如图2、3、4所示,按照滞环宽度由宽到窄依次标注A型、B型、C型。

图2 A型滞环比较器结构

图3 B型滞环比较器结构

图4 C型滞环比较器结构
以A型为例说明零电压矢量添加过程。从X>1减小到X=0.25的过程中,Y=1;从X= 0.25减小到X= -1的过程中,系统一直使用零电压矢量。从X<-1到X=-0.25的过程,Y= -1;从X= -0.25增大到X= 1的过程中系统一直使用零电压矢量。与A型转矩滞环比较器不同,B型和C型转矩滞环比较器的输出跳变点分别设置在X=±0.5和X=±0.75处。在每个控制周期中,A型、B型、C型三种转矩滞环比较器的滞环宽度依次由宽到窄,相应依次增加了零电压矢量作用时间即:ΔtA<ΔtB<ΔtC。
3 滞环宽度的优化对转矩波动的影响
在Matlab/Simulink仿真中采用永磁同步电机参数为:定子电阻Rs=4.2Ω,直、交轴等效Ld=Lq=0.026H,转子磁链ψf=0.175Wb,转动惯量J=0.0008kg·m2,粘滞系数B=0,极对数p=2。
分析了当系统给定转速分别是190r/min、760r/min、1430r/min时的转矩波动,同一转速下分别采用了A、B、C三种类型滞环比较器,得出仿真结果如图5、6、7所示。

图5 转速190 r/min时的转矩波动

图6 转速760 r/min时的转矩波动

图7 转速1430 r/min时的转矩波动
三种转矩滞环比较器结构不同,转矩滞环宽度不同,在每一个控制周期内零电压矢量作用的时间也不同,由短到长依次是ΔtA<ΔtB<ΔtC。在零电压矢量作用中,转矩的波动只与功角的增量Δδ=-Δδr=-ωrΔt有关,由图5、6、7可知,在相同的给定速度下随着转矩滞环比较器的滞环宽度的增大,转矩的波动逐渐减小,通过图5可以看到在相对低速下,转矩波动甚至有一段时间接近于零,比较图5、6、7发现相同的滞环宽度下,随着系统速度的降低,转矩波动的情况得到有效的抑制。系统速度相同时,转矩滞环比较器滞环宽度越大,转矩波动越小。表1为给定转速分别是190r/min、760r/min、1430r/min时的转矩波动,系统在同一转速条件下分别采用了A、B、C三种类型滞环比较器和传统型转矩滞环比较器。在相同的转速条件下,三种改进型滞环比较器A型、B型、C型的转矩波动都要比传统的滞环比较器的转矩波动小。在此三种改进型滞环器中相同转速条件下,滞环宽度越大转矩波动越小。对于所有类型的转矩滞环比较器来说,滞环宽度相同,转速越低,系统转矩波动越小。
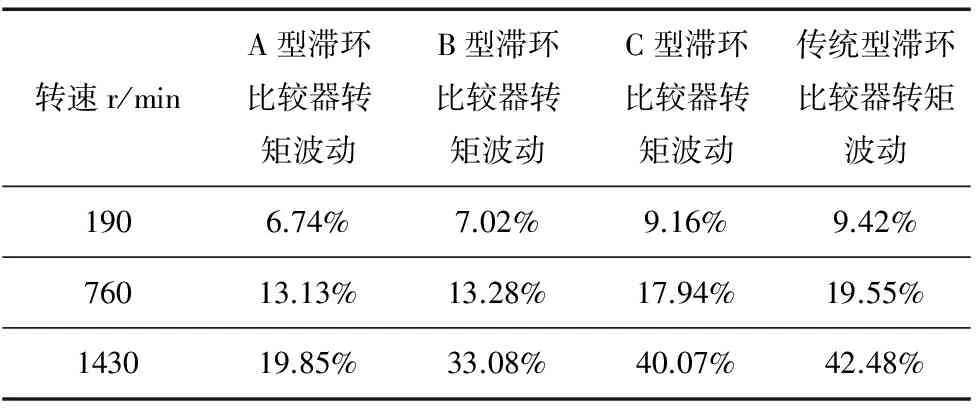
表1 转矩滞环比较器在三种速度条件下的转矩波动表
4 结论
在永磁同步电机直接转矩系统中,要采用滞环宽度优化的转矩滞环比较器,选择合适的零电压矢量,使系统转矩波动明显减小。当系统速度相同时,转矩滞环比较器滞环宽度越大转矩波动越小;滞环宽度相同时,转速越低转矩波动越小。因此,在永磁同步电机直接转矩控制系统中,应选择相对低的系统运行速度,滞环宽度较大的变结构转矩滞环比较器,利用零电压矢量,可以更有效减小其转矩波动。
[1] 王兵,潘玉田,刘刚.异步电机直接转矩控制脉动抑制测量[J].组合机床与自动化加工技术,2009(12):66-68.
[2] 杨玉巍,田梦君,黄玉强..基于三点式转矩调节的交流电机直接转矩控制系统仿真研究[J].组合机床与自动化加工技术,2006(1):41-44.
[3] 孙军,刘伟,田龙等.基于SIMULINK的伺服进给系统仿真模型与分析[J].组合机床与自动化加工技术.2013(3):80-83.
[4]TaylorD.Nonlinearcontrolofelectricmachines:anoverview[J].IEEETrans,onControlSystemsMagazine, 1994, 14(6) 41-51.
[5] 田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002,17(1):7-11.
[6] 李耀华,刘卫国.零电压矢量在PMSM直接转矩控制系统中的应用[J].电力电子技术,2010,44(9):50-51.
[7] 王莹,胡育文,杨建飞.零矢量在永磁同步电机直接转矩控制中的作用及仿真研究[J].微电机,2011, 44(5) :48-51.
[8] 贾洪平,贺益康.永磁同步电机直接转矩控制中零矢量的作用研究[J].电气传动2006,36(4):13-16.
[9] 朱国昕.基于SVPWM的永磁同步电动机直接转矩控制[J].变频器世界,2012(5):64-66.
[10] 赵宏革,朱景伟,樊印海.直接转矩控制系统零电压矢量的调节作用[J].大连海事大学学报,2010,36(2):71-74.
[11] 卢达,赵光宙,李楠.包含零矢量的永磁同步电机直接转矩控制[J].电机与控制学报,2010,14(9): 1-6.
(编辑 赵蓉)
The Function Analysis of Zero Voltage Vector Based on the Structure of the Torque Hysteresis in Optimizing
CUI Jie-fan,WANG Hong-xue,QIN Chao
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China.)
In order to improve the performance of permanent magnet synchronous motor direct torque control such as high speed machining center and precision grinder, from the principle of zero voltage vector function, it analyzes the role of zero voltage vector in the Permanent magnet synchronous motor control system and the impact on Torque hysteresis comparator structure of rotating torque fluctuations deeply. Compared with the traditional torque hysteresis comparator, the hysteresis width optimized torque hysteresis comparator reduces torque ripple obviously, by adding zero voltage vectors reasonably. Using the Matlab simulation platform, it proves that under the condition of the same width of hysteresis the smaller the system speeds the smaller the torque ripples, and under the condition of the same system speed the greater the hysteresis width, the smaller the torque ripple.
permanent magnet synchronous motor; direct torque control; zero voltage vector; torque hysteresis
1001-2265(2014)04-0038-03
10.13462/j.cnki.mmtamt.2014.04.010
2013-09-16
辽宁省科技厅资助基金项目(201202167)
崔皆凡(1963—),女,沈阳人,沈阳工业大学教授,博士,主要从事特种电机及其控制的研究,(E-mail)747906006@qq.com。
TH16;TG65
A
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
防爆电机(2022年4期)2022-08-17
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
微特电机(2019年7期)2019-08-02
组合机床与自动化加工技术(2014年12期)2014-03-01