
基于数据融合的多传感器实时数据处理系统
2014-07-13 06:44段宗涛
电子设计工程 2014年7期
段宗涛,程 豪,康 军
(长安大学 信息工程学院,陕西 西安 710064)
基于数据融合的多传感器实时数据处理系统
段宗涛,程 豪,康 军
(长安大学 信息工程学院,陕西 西安 710064)
针对采用多传感器进行环境基本参数(如温度、湿度等)实时采集的实际应用中信息不完备的问题,采用基于采集数据间相互支持度的数据融合方法,提高数据采集的精度,改善因传感器自身的精度及环境噪声等因素引起的误差,并且可以根据新加入传感器网络的传感器节点数量自适应的进行融合。实验结果验证了该系统的有效性。
数据融合;多传感器;实时数据处理;自适应
随着科学技术的发展,智能监测应用日益普及,智能监测常用的手段是使用无线传感器网络。因此,部署在智能监测系统中的传感器种类和数量都在大幅度增加,用户对传感器网络获取的数据的要求也在日益提高。而对多传感器获取数据后的信息处理系统,采用传统的、简单的数据处理方法已达不到用户的要求,如何综合利用来自多传感器的信息,获得对被测对象一致性的可靠了解,以利于系统做出正确的响应、决策和控制,是研究者所面临的一个重要问题。多传感器数据融合为解决这一问题提供了新的思路和方法,其应用研究也越来越受到重视。本文以深联科技公司的IOTNODE2530(集成温、湿度传感器)实验开发套件为硬件基础,设计了一个具有数据采集、数据存储、数据融合和融合结果实时显示功能的系统。
1 系统工作流程图及工作原理
1)系统工作流程如图1所示。
2)系统工作原理
首先,多个IOT-NODE2530终端节点通过协调器节点组成一个无线传感器网络,通过串口线把协调器节点和上位机连接,串口读写数据程序把传感器采集到的数据按字段存储到mysql数据库中。然后实时处理数据库中的数据,并且可以根据当前无线传感器网络中传感节点的数量自适应的调整数据融合数组的维数,也就是说在当前的无线传感器网络中,可以灵活的添加或去除一个或者多个传感器节点。这在现实应用中比较方便,比如说某个节点出现了故障无法工作了,系统仍然可以正常的运行。当确定了融合数据数组的维数,就可以通过基于采集数据间的相互支持度的数据融合方法求出融合结果,最后把融合结果实时的绘制成融合曲线。
2 系统硬件组成
系统硬件由处理节点、仿真器、传感器、串口线组成,其具体功能和部件如下。

图1 系统工作流程示意图Fig. 1 Schematic diagram of system work flow
2.1 IOT-NODE2530节点
CC2530:增强型8051处理器+CC2520射频前端;芯片内存:256k FLASH、8k内部SRAM;工作电压:2.0 V~3.6 V;工作频率:2.4 GHz;休眠电流<10 mA;传输速率:250 bps;节电开关:1个电源选择开关,1个5向按键,3个LED指示灯;供电方式:2节5号电池供电,USB供电,外界电源供电(+9V,内负外正);接口:1个RS232接口,10针JTAG插座,外扩24针I/O口,1个两节电池盒,1个SAM天线座。
2.2 仿真器
IOT-NODE2530支持CC Debugger仿真器调试。
仿真器接口:1个USB插座;1个JTAG口;3个LED指示灯;外界IO接口
2.3 传感器
IOT-NODE2530节点上支持如下传感器扩展:
高精度温湿度传感器(标配)、高精度光传感器(标配)、可扩展其他传感器。
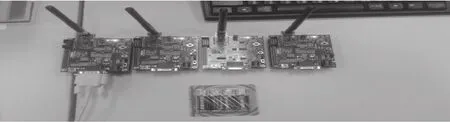
图2 节点组网Fig. 2 Node network
2.4 CC2530节点组网
图2所示的无线传感器网络是基于Z-STACK协议栈来组网的,由多个IOT-NODE2530终端节点通过协调器节点组成一个无线传感器网络。其中,终端节点和协调器节点的区别仅仅是节点上运行的程序不同。
3 系统软件设计
为了便于系统维护和功能扩充,本系统采用了模块化程序设计方法,系统各个模块的具体功能都是通过子程序调用实现的。软件设计采用了在VC++ 6.0[1]环境下编程。
3.1 数据采集及存储
由于mysql[2]数据库体积小、速度快、开源等特点,所以本系统采用的是mysql数据库。本系统是在VC++中使用ADO[3]方式操作mysql数据库。CC2530节点把传感器监测到得数据收集到协调器节点上,协调器节点再通过RS232串口线把接收到的数据传到上位机。 图3是上位机从串口读出的3组数据。
在mysql数据库中创建date表,字段id表示编号,字段tem表示温度,字段hum表示湿度,字段date表示数据存储的时间(系统时间),device_id表示设备编号,各个字段具体如图4所示。

图4 date表结构Fig. 4 Date table structure
对上位机在串口读到的数据进行字段截取然后存储到数据库,如图5所示。
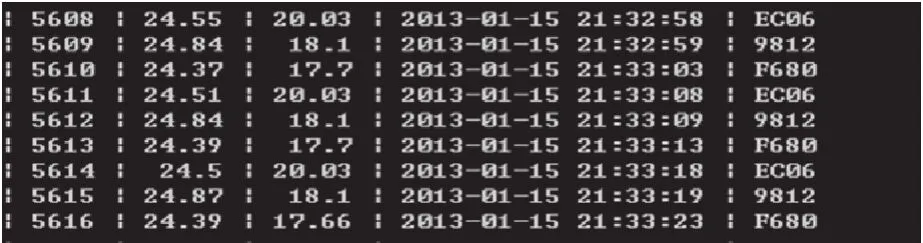
图5 date表各字段存储的数据Fig. 5 Date stored in the date table
3.2 数据融合技术
针对被研究对象某一时刻的物理特性,利用测量设备在一个周期内得到n个测量值zi(i=1,2,…n),由于综合考虑了传输误差、计算误差、环境误差、噪声误差、人为干扰、传感器自身的精度及被测对象自身性质等因素,zi将不严格服从正态分布,所以基于数据为正态分布模型的一些数据处理方法(野值剔除和数据融合算法)将不可避免地增加数据库里的系统误差。这样对测量数据的真伪程度只能由数据x1,x2,…xn的自身来确定,即xi的真实性越高,则xi被其余的数据所支持的程度就越高。所谓xi被xj支持程度即从xj数据来看数据xi为真实数据的可能程度。针对数据间支持程度问题这里引入相对距离[4]的概念。定义测量数据间的相对距离为dij,其表达形式如下:

由dij的表达形式可知,dij越大则表明两数据间的差别越大,即两数据间的相互支持程度就越小。相对距离的定义形式完全建立在现有数据隐含信息的基础上,降低了对于先验信息的要求。进而可以定义一个支持度函数rij,rij本身应满足一下两个条件:
1)rij应与相对距离成反比关系;
2)rij∈(0, 1]使数据的处理能够利用模糊集合理论中隶属函数的优点,避免数据之间相互支持程度的绝对化。
则支持度函数rij定义为:

其中max{dij}表示数据间相对距离中的最大值,很明显数据间相对距离越大,则数据间的支持度将越小。从式(2)的定义形式可知,当数据间的相对距离为最大值时,可以认为两数据已经不再相互支持,则此时支持度函数的值为零;而数据间的相对距离越小,则数据间的相互支持度就越大,数据对自身的相对距离为零,则数据对自身的支持度为1.由于rij在dij∈[0, max{dij}]上取值从1至0依次递减,所以满足支持度函数应具有的性质。而且,这种满足模糊性支持度函数rij的定义形式更符合实际问题的真实性,同时便于具体实施,使得融合的结果更加精确和稳定。
对于数据融合问题,建立支持度矩阵R


应综合ri1,ri2, …rin的总体信息,则由概率源合并理论,即要求一组非负数v1,v2…vn使得

将上式改写为矩阵的形式则




在本系统中,要实现数据融合,首先要把从mysql数据库中读取的数据进行分组,即实时判断无线传感器网络由几个节点组成,由于设定的数据发送周期是10 s,所以可以根据数据库中的时间字段来区分,实时得到这个无线传感器网络有几个节点,然后通过融合算法可以计算得到融合值。
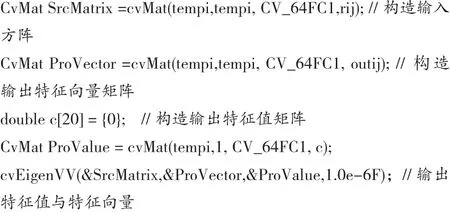
数据融合算法程序由于要求矩阵的特征向量,本系统采用的是通过调用OpenCV函数来实现。首先要在工程环境中配置好编译环境,然后再头文件中添加:#include <cv.h>
下面的代码是求特征值和特征向量的函数:
3.3 融合结果显示
为配合实时采集数据的接收和处理,本系统也把融合的结果实时显示出来。显示结果如图6所示。
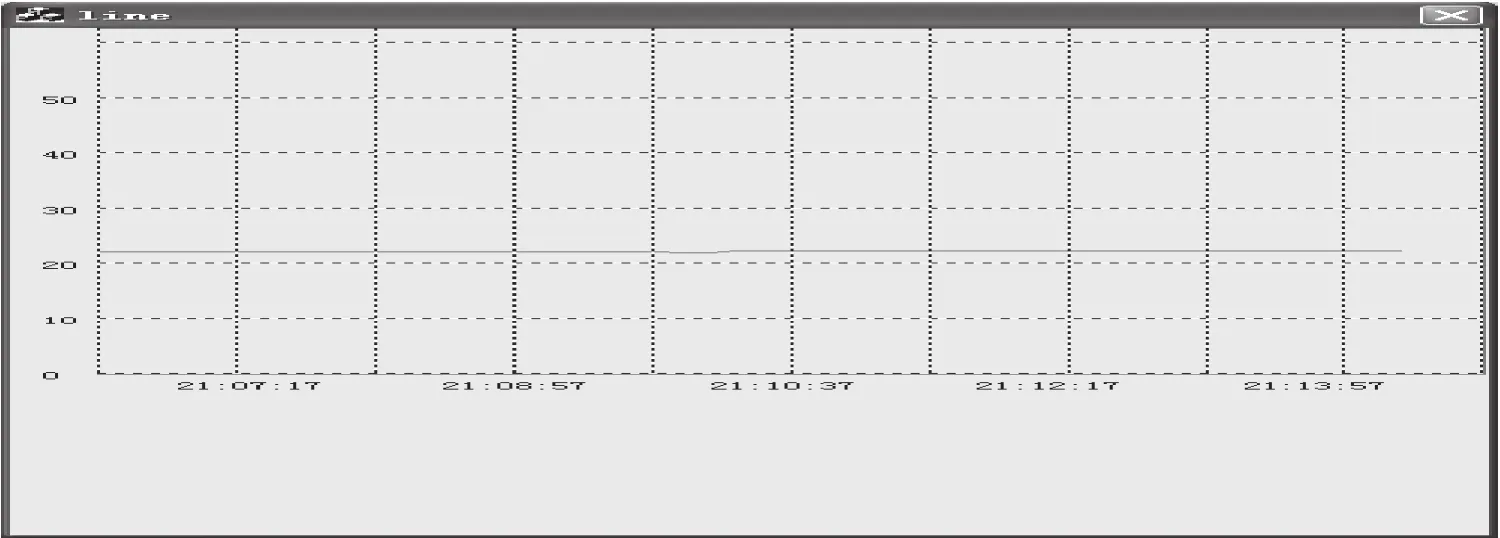
图6 融合结果实时显示Fig. 6 Fusion results display in real time
图中横坐标表示的是时间,其会随着数据库的更新实时更新,两个相邻的时间点间的间距是100 s(即10组融合数据),纵坐标表示的是温度值,图中的红线是实时绘制的融合曲线。
4 系统测试
图7显示的是由两个终端节点组成的无线传感器网络,左边第一个为协调器节点,其他为终端传感器节点,显示器上左侧是mysql数据库在实时存储数据,右侧是实时绘制融合曲线。

图7 3个节点组网测试图Fig. 7 3 node network test chart

图8 4个节点组网测试图Fig. 8 4 node network test chart
图8在两个终端节点的基础上增加了一个,该系统仍然正常的工作。实验表明当协调器节点的数据发送周期为10 s时,参与组网的终端节点数量不大于9个,该系统仍然能正常工作。也可以根据需要,增加或者去除若干个终端节点,系统仍然能正常工作。
5 结束语
文中以深联科技公司的IOT-NODE2530实验开发套件为硬件基础,利用多传感器信息融合技术[7]开发了实时数据处理系统,该系统可以避免由于单个传感器节点出现故障或者自身精度等问题造成的监测偏差,其监测结果具有很高的准确性、可靠性和实时性。本文采用的带有温、湿度传感器的节点,可以应用于对于温度、湿度有要求的实验环境、家居环境的监测等。当将传感器换成光敏传感器、速度传感器、压力传感器等,就可以将本文的系统应用到其他领域。
[1]侯俊杰.深入浅出MFC[M].武汉:华中科技大学出版社,2001.
[2]崔洋,贺亚茹.MySQL数据库应用从入门到精通[M].北京:中国铁道出版社,2012.
[3]孙鑫,余安萍.VC++深入详解[M].北京:电子工业出版社,2006.
[4]范金城,梅长林.数据分析[M].北京:科学出版社,2002.
[5]周军,王志胜,周凤岐.基于线性均方估计的数据融合理论[J].宇航学报,2003,24(4)364-367.
ZHOU Jun,WANG Zhi-sheng,ZHOU Feng-qi. Data fusion theory based on linear mean square estimation[J].Journal of Astronautics,2003,24(4)364-367.
[6]唐明等. 线性代数[M].浙江大学出版社,2004.
[7]崔智军,王庆春.基于D-S证据理论的多传感器数据融合[J].现代电子技术,2011(12):201-204.
CUI Zhi-jun,WANG Qing-chun.Multi-sensor data fusion based on D-S evidence theory[J].Modern Electronics Technique,2011(12):201-204.
Real-time data processing system based on multi-sensor data fusion
DUAN Zong-tao, CHENG Hao, KANG Jun
(College of information engineering,Chang'an University,Xi’an710064,China)
This paper focus on the problem that incomplete information in the practical application of uses multiple sensor to real-time acquisition the surrounding environment basic parameters (such as temperature, humidity etc.), use the method of data fusion based on the mutual support degree between the collect data, improve the precision of data acquisition,to improve the error caused by the sensor's precision and environment noise etc, and according to the number of new sensor nodes join in the sensor network Adaptive to fusion. The experimental results show this system is effective.
data fusion; multi-sensor; real-time data processing; adaptive
ata
TN811+.1
A
1674-6236(2014)07-0043-04
2013-09-02稿件编号201309005
段宗涛(1977—),男,陕西凤翔人,博士后,副教授。研究方向:多媒体智能信息处理、信息安全等。
图3 上位机接收到的数据 Fig. 3 PC
猜你喜欢
江苏科技信息(2022年16期)2022-07-17
无线互联科技(2021年4期)2021-04-21
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
财经(2017年2期)2017-03-10
财经(2016年15期)2016-06-03
财经(2016年3期)2016-03-07
财经(2016年6期)2016-02-24
图书馆建设(2015年10期)2015-02-13
