
旋转式合成孔径雷达干涉成像方法
2014-07-11 01:16廖桂生
西安电子科技大学学报 2014年4期
杨 科, 廖桂生, 徐 青
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
笔者根据ROSAR系统能够快速重访同一场景的特点,并结合直升机等旋翼飞行器易于悬停的特性,建立了ROSAR 的干涉成像模型.在该模型下,成像平台首先保持在某一高度上完成场景的一次观测,然后上升至另一高度完成场景的二次观测,经过两次或者多次观测可以获得多组ROSAR数据,通过对这些数据进行干涉处理获得场景的高程信息.在实际的数据采集过程中,由于受强风、对流等天气影响,同一系统平台在不同高度上存在旋转轴偏移问题.轴偏移将会引起天线与场景之间的距离变化,而在ROSAR模式中,由于受到物理结构的限制,不同斜距对应的合成孔径大小存在差异.因此,轴偏移会导致同一场景目标的方位带宽有所变化,同时轴偏移也会引起干涉相位发生变化,使得高程信息无法正确获取.为了使不同高度的转轴位置相互重合,同时保障转轴位置和场景位置的相对关系,笔者采用转轴和场景整体平移的方法,将轴偏移等效为场景位置移动,进而分析场景位置变化对方位带宽和干涉相位的影响,获取斜距差和偏移量的关系式,最后通过构建补偿函数来消除轴偏移的影响.
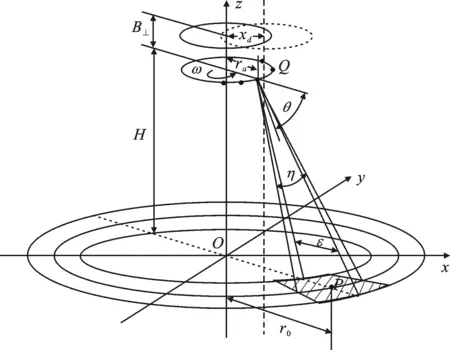
图1 ROSAR干涉模型示意图
1 ROSAR干涉模型
如图1所示,雷达平台距地面的高度为H,平台上的天线以角速度ω作匀速圆周运动,并指向背离转轴方向,对周围场景进行圆环形照射.定义天线到转轴中心的垂直距离(旋转半径)为ra,俯仰角为θ,俯仰向波束宽度为ε,方位角为0°(天线照射方向垂直于天线速度方向),方位向波束宽度为η.考虑到天线作圆周运动,为了便于分析和计算,文中采用圆柱坐标系(r,φ,z).不失一般性,假设天线旋转至x轴平行位置时,旋转角定义为0°.旋转至任意位置Q时,旋转角为ωta,则天线位置为(ra,ωta,H).假设点目标P的位置为(r0,φ0,z0),r0表示点目标的地面距离(地距),φ0表示点目标的方位向位置,z0表示点目标的高度,则天线至点目标的斜距表达式为

(1)
假设雷达发射线性调频脉冲信号p(t)=rect(t/Tp) exp(j2πfct+jπγt2),Tp为发射脉冲宽度,fc为发射信号载频,γ为信号调频率.点目标回波经过基频变换,在距离快时间-方位慢时间域 (tr-ta域)可表示为
(2)
其中,λ是发射信号波长.
利用已有的二维ROSAR成像算法[2,7-8],对原始回波数据S0进行二维匹配成像,可得单幅ROSAR图像为
(3)
其中,A1表示二维成像后的幅度,Br表示发射信号带宽,Ba表示方位向带宽,α表示天线至点目标的最短斜距,α= ((ra-r0)2+(H-z0)2)1/2.
当平台垂直上升至另一高度H+B⊥时,对场景进行第2次观测,如图1所示,可利用二维成像算法获得第二幅ROSAR图像.通过对两幅图像进行干涉处理可获得场景的高程信息,即能实现ROSAR干涉成像的目的.
初中数学学科涉及的知识范围广,难度大,平时还有许多考试,需要时间进行复习,因此,对教师的教学进度有一定要求。这使得教师的教学过程往往以提高课堂教学效率为目标,在培养学生独立思考能力方面就会流于表面,只注重形式化的过场,而没有把培养学生独立思考能力的教学活动真正落到实处,学生无法理解独立思考的本质,也就无法提高自身的独立思考能力。
2 轴偏移影响及补偿方法
在实际情况中,由于受到周围环境影响,不同高度的旋转轴中心可能存在偏移,如图1中的虚线所示,两轴之间的偏移量为xd.为了方便讨论,图中假设转轴偏移方向与x轴平行,这一假设不影响模型实质描述.要使第2次数据录取坐标与第1次的相同,需对第2个转轴中心进行 (-xd,0,0)的位置校正.由于转轴位置和场景位置是相对的,为了满足转轴与场景的位置相对不变,需同时对照射场景进行整体移动.原场景内的点目标P位置为(r0,φ0,z0),假设移动后的点目标P′位置为(roffset,φoffset,z0),P与P′的关系为
整理式(4)和式(5)可得新的位置参数为
在新的坐标位置下,式(3)中的斜距位置α、方位向位置φ0以及相位大小 -4πα/λ发生改变,其中,新的斜距大小α′= ((ra-roffset)2+ (H-z0)2)1/2.同时,由于ROSAR的特殊几何结构,在新的坐标中方位向带宽Ba也有相应的变化,导致干涉图像之间的相关性下降.以下具体分析转轴偏移对方位带宽和干涉相位的影响.
2.1 对方位带宽的影响
在传统的线性SAR成像系统中,多普勒调频率随斜距的增加而减少,但是合成孔径时间随斜距的增加而增加,因此,不同斜距的方位带宽是相同的[9-10].而在ROSAR系统中,由于物理结构的限制,合成孔径时间不能随斜距的增长而线性增长,进而导致不同斜距的方位带宽不同.以下将基于ROSAR的方位向调频率和合成孔径时间的计算,对方位带宽进行推导,进而分析转轴偏移对方位带宽的影响.
利用匹配函数对原始回波数据S0进行距离向匹配,可得
(8)
其中,A2表示距离向匹配后的幅度.
对式(8)中的相位进行二次求导,可得方位向调频率为
(9)
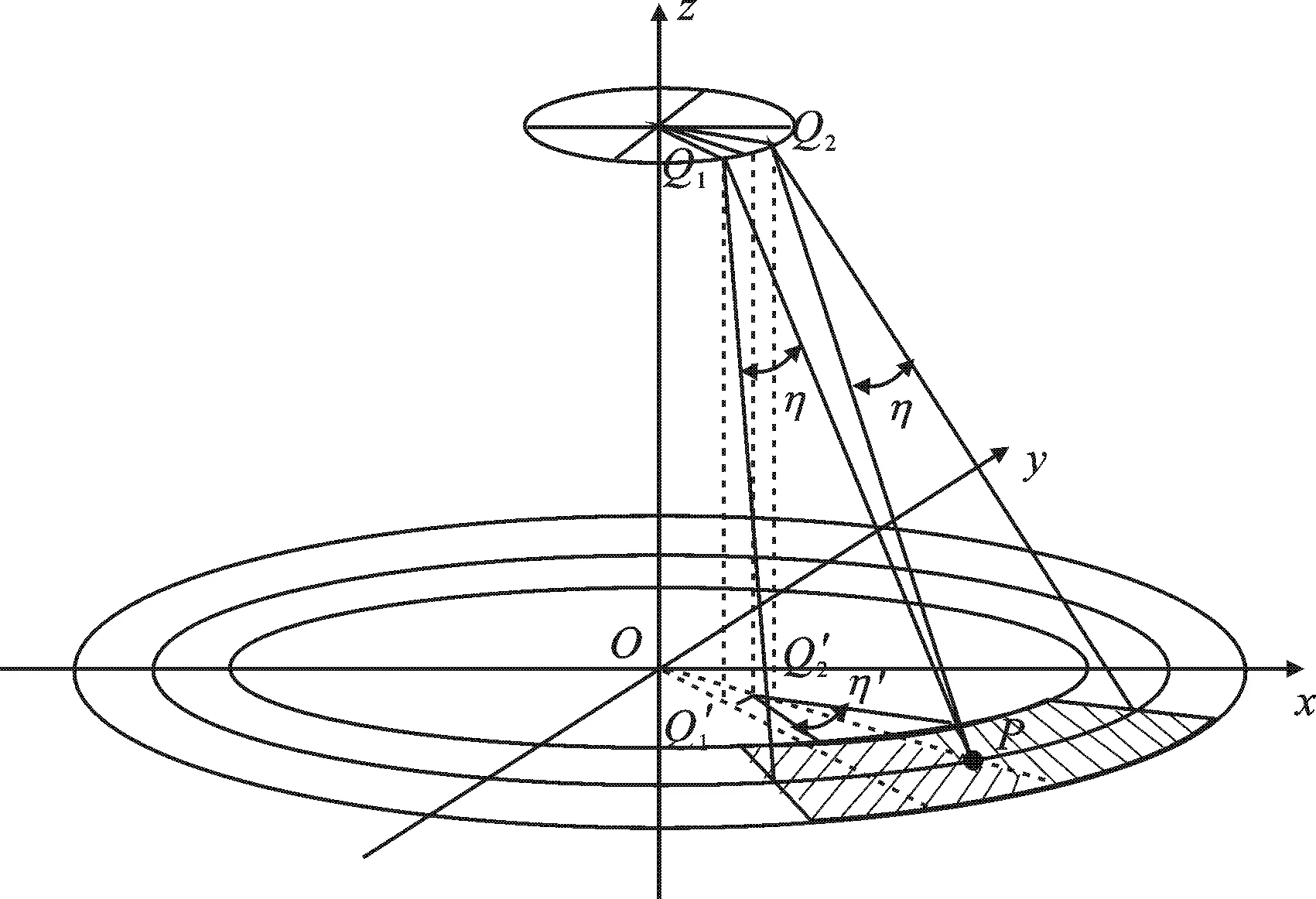
图2 ROSAR合成孔径示意图

(10)
其中,η′为方位向波束宽度η在水平面上的投影.对于高度位置为z0的点目标,假设俯仰角为θz0,根据几何关系可得 cosθz0= (r0-ra)/α,从而可得η′和η的关系表达式为
tan(η′/2)=tan(η/2)/cosθz0.
(11)
文献[11]给出了二维场景的合成孔径长度表达式,在不考虑平台高度H和点目标高度z0的情况下,笔者将三维场景简化为二维场景,令η′=η,式(10)简化为S=ηra(1-ra/r0),此时该式与文献[11]中的表达形式相一致.
假设T为方位向有效合成孔径时间,则时间T与孔径S的关系可表示为
ωT=S/ra.
(12)
根据式(9)的方位向调频率Ka及式(10)~式(12)所得的合成时间T,可得方位向带宽为
Ba=|KaT|=2βωη′(1-ra/r0)/(λα) .
(13)
由式(13)可知,方位带宽Ba随着r0的变化而变化,而转轴偏移可以等效于r0的变化,进而引起Ba的变化.根据文献[12-13]可知,方位带宽的差异将会导致信号去相关,进而使得干涉相位的等效噪声增加.如果转轴偏移引起的方位带宽变化较大,在预处理的过程中需要对原图像进行方位预滤波,从而保证最终的干涉成像结果.
2.2 对干涉相位的影响及补偿方法
转轴偏移对图像相位也会产生影响,即式(3)中相位 exp(-j4πα/λ) 变为 exp(-j4πα′/λ).以下分析两者相位差 exp(-j4πΔα/λ) 与转轴偏移量xd的关系表达式,其中斜距差表示为 Δα=α′-α.
将变化后的地距roffset表示为r0+Δr0,并对斜距α′进行泰勒级数展开,可得
(14)
式(14)中二次及二次以上高次项为极小量,在只保留一次项的情况下可得斜距差Δα= (r0-ra)Δr0/α.而地距差可表示为 Δr0=roffset-r0,重新改写式(6),并对其进行泰勒级数展开,可得
(15)
忽略式(15)中的二次及二次以上极小量,可得Δr0=-cosφ0xd.结合式(14)所得结果,以Δr0为中间变量,可得斜距差Δα与转轴偏移量xd的关系式为
Δα=[-(r0-ra)/α] cosφ0xd.
(16)
由以上分析可知,旋转中心轴的偏移导致图像增加了一个附加相位 exp(-j4πΔα/λ),其中Δα如式(16)所示.通过干涉手段获取场景的高程信息,对干涉相位的精确性有极高的要求.为了正确恢复场景高程信息,需要对上述附加相位进行补偿.补偿函数为
(17)
对两幅ROSAR图像进行配准处理,并通过复共轭相乘获取原始干涉相位.该相位包含了轴偏移所引起的附加相位.在去平地相位之前,利用式(17)所示函数与原始相位进行相乘,可实现附加相位校正.接着通过去平地相位、相位解缠绕及高度换算等处理,最终可获得ROSAR场景高程信息.
3 仿真实验
ROSAR系统的主要仿真参数如下: 平台高度 1 000 m,旋转半径 1.5 m,地距变化范围 1 100 m~ 2 300 m,俯仰角60°,信号发射波长 0.03 m.图3给出了旋转轴偏移对方位带宽的影响.通常情况下旋转轴受环境影响存在数米到数十米的偏移量,图3考虑极大偏移情况,选取偏移量为 100 m.图3(a)以场景目标的方位位置φ0为参变量,给了轴偏移前后的方位带宽差ΔBa随地距r0的变化曲线.由图可知,轴偏移会引起方位带宽发生变化(即存在方位带宽差),轴偏移方向上 (φ0=0°,实线所示)的目标带宽差变化较大,远离轴偏移方向 (φ0=90°,虚线所示)的目标带宽差变化较小,但是对于各方位位置上的目标来说,方位带宽变化都为较小量.图3(b)给出了某一点目标在轴偏移前后的方位带宽截面图,点目标的具体位置为方位向φ0=0°、地距向r0=1 733 m,由图可知,两者的方位带宽基本上是一致的.综上所述,轴偏移会导致方位带宽发生变化,但是该变化量较小,可忽略其影响.
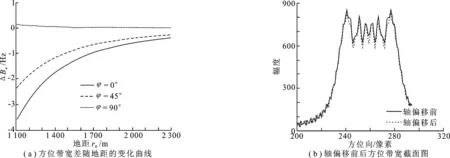
图3 方位带宽影响分析
图4给出了旋转轴偏移所引起的干涉相位影响.图4(a)为不同平台高度的两幅ROSAR图像干涉相位图,两幅图像在产生干涉相位前已经过图像配准处理,平台1高度为 1 000 m,平台2高度为 1 001 m,假设平台1的轴位置为参考位置,平台2相对平台1水平偏移 2 m,其它参数如上述所示.平台2的轴位置偏移导致干涉相位中存在一个附加相位,图4(b)给出了上述偏移所产生的附加相位图,该相位将会影响最终的高程信息获取,为此需要对这一附加相位进行补偿,补偿结果如4(c)所示.图4(c)中包含平地相位,对其进行去平地相位处理,并进行相位解缠绕及高度换算,最终可得到如图4(d)所示的场景高程图.
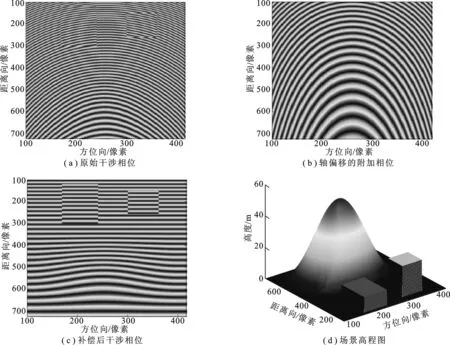
图4 干涉成像结果
4 结 束 语
笔者构建了ROSAR干涉成像模型,分析了不同高度系统平台的轴偏移问题.通过分析发现,轴偏移会影响方位带宽和干涉相位.实验仿真表明,轴偏移导致ROSAR方位带宽产生变化,但是该变化量较小,在干涉处理过程中可以忽略上述影响.轴偏移对干涉相位产生影响,使得图像有一个附加相位,该相位影响较大,仿真实验在去平地相位之前对该相位进行了校正,获得较好的补偿效果.最后,经过解缠绕及高度换算,获得场景的三维高程图.
[1] Jeon M, Kim Y S. Migration Technique for Rotor Synthetic Aperture Radar [J]. Electronics Letters, 1997, 33(7): 630-631.
[2] Lee H, Cho S J, Kim K E. A Ground-based Arc-scanning Synthetic Aperture Radar (arc-SAR) System and Focusing Algorithms [C]//IEEE International Geoscience and Remote Sensing Symposium. Piscataway: IEEE, 2010: 3490-3493.
[3] Ali F, Urban A, Vossiek M. A Short Range Synthetic Aperture Imaging Radar with Rotating Antenna [J]. International Journal of Electronics and Telecommunications, 2011, 57(1): 97-102.
[4] Zhang Jun. The Static Small Object Detection Based on Ground-based Arc SAR [C]//International Conference on Microwave and Millimeter Wave Technology. Piscataway: IEEE, 2012: 1489-1492.
[5] Ghasr M T, Pommerenke D, Case J T, et al. Rapid Rotary Scanner and Portable Coherent Wideband Q-band Transceiver for High-resolution Millimeter-wave Imaging Applications [J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(1): 186-197.
[6] 廖轶, 周松, 邢孟道, 等. 一种基于级数反演的机载圆迹环扫SAR成像算法 [J]. 电子与信息学报, 2012, 34(11): 2587-2593.
Liao Yi, Zhou Song, Xing Mengdao, et al. An Imaging Algorithm for Airborne Circular Scanning SAR Bbased on the Method of Series Reversion [J]. Journal of Electronics & Information Technology, 2012, 34(11): 2587-2593.
[7] Bara M, Sagués L, Paniagua F, et al. High-speed Focusing Algorithm for Circular Synthetic Aperture Radar (C-SAR) [J]. Electronics Letters, 2000, 36(9): 828-830.
[8] 孙兵, 周荫清, 陈杰, 等. 广域观测圆轨迹环扫SAR成像模式研究 [J]. 电子与信息学报, 2008, 30(12): 2805-2808.
Sun Bing, Zhou Yinqing, Chen Jie, et al. Operation Mode of Circular Trace Scanning SAR for Wide Observation [J]. Journal of Electronics & Information Technology, 2008, 30(12): 2805-2808.
[9] 侯育星, 张磊, 徐刚, 等. 脉冲相位编码信号大测绘带合成孔径雷达成像 [J]. 西安电子科技大学学报, 2012, 39(5): 54-60.
Hou Yuxing, Zhang Lei, Xu Gang, et al. Wide Swath SAR Imaging with Pulse-phase-codes [J]. Journal of Xidian University, 2012, 39(5): 54-60.
[10] 梁毅, 王虹现, 邢孟道, 等. 同航线双基调频连续波SAR改进距离徙动算法 [J]. 西安电子科技大学学报, 2011, 38(1): 71-79.
Liang Yi, Wang Hongxian, Xing Mengdao, et al. Modified RMA for the Tandem Bistatic FMCW SAR with Frequency Non-linearity Correction [J]. Journal of Xidian University, 2011, 38(1): 71-79.
[11] Kreitmair-Steck W, Braun G. Heliradar Technology for Helicopter Allweather Operations [C]//Proceedings of SPIE-Radar Sensor Technology Ⅱ. Bellingham: SPIE, 1997: 28-38.
[12] 郭交, 李真芳, 刘艳阳, 等.一种基于相干性本质的InSAR方位向预滤波方法 [J]. 电子学报, 2012, 40(3): 417-421.
Guo Jiao, Li Zhenfang, Liu Yanyang, et al. An Improved Method for InSAR Azimuth Prefiltering Based on Coherence Principle [J]. Acta Electronica Sinica, 2012, 40(3): 417-421.
[13] Wang R, Deng Y K, Loffeld O, et al. Focusing Bistatic SAR Data in Double Sliding Spotlight Mode with TerraSAR-X and PAMIR Based on Azimuth Chirp Filtering [C]//9the European Conference on Synthetic Aperture Radar. Piscataway: IEEE, 2012: 772-775.
猜你喜欢
电力勘测设计(2022年2期)2022-03-08
幼儿园(2021年12期)2021-11-06
上海大中型电机(2021年1期)2021-06-09
中国惯性技术学报(2019年5期)2020-01-07
冶金设备(2019年6期)2019-12-25
山东冶金(2019年2期)2019-05-11
测绘通报(2017年2期)2017-03-07
电脑爱好者(2016年23期)2017-01-05
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
