
稻麦秸秆打捆机压缩机构设计及力学分析①
2014-07-09 01:59:46张致源刘新柱刘文博王媛媛张琪昊郭永强
佳木斯大学学报(自然科学版) 2014年4期
张致源, 刘新柱, 刘文博, 王媛媛, 张琪昊, 杨 柳, 郭永强
(佳木斯大学机械工程学院,黑龙江佳木斯154007)
0 引言
随着化石能源的枯竭,可再生的生物质能开发及应用得到了前所未有的重视,专家学者从不同的角度对其进行了广泛深入的研究及探讨[1].我国每年农作物秸秆的产量都在7亿t以上,其中稻麦秸秆的产量在3亿t左右,在生物质能中占有很大的比重[2].但是目前稻麦秸秆的利用率依然很低,还是以荒烧为主,既浪费了能源,又对环境产生了很大的污染.例如,2013年10月21至23日影响东北大部分地区的雾霾天气的成因就与农作物秸秆荒烧有很大的关系.通过调查了解到,稻麦秸秆之所以选择荒烧,主要因为其收获困难,虽然总部设在美国的纽荷兰等公司打捆机技术已经发展的较为成熟,但是其价格却很高,农户难以承担;国产打捆机价格较为低廉,但技术不成熟,工作效率较低,且散捆率较高,得不到广泛应用及推广[3].因此迫切需要设计一种低功耗、高效率、价格低廉的打捆机.项目组对秸秆打捆机压缩机构进行了深入的研究,设计了一种增力系数大、适应性广的稻麦秸秆打捆机压缩机构.
1 工作原理
传统的稻麦秸秆打捆机大都采用曲柄滑块压缩机构,该机构具有结构简单、制造成本低等优点;其缺点是压缩机构的压缩力受到了机器功率的限制.在不增加机器功率的前提下,为了获得较大的压缩力,本文创新设计了一种利用铰杆的角度效应进行增力的压缩机构,其结构如图1所示.
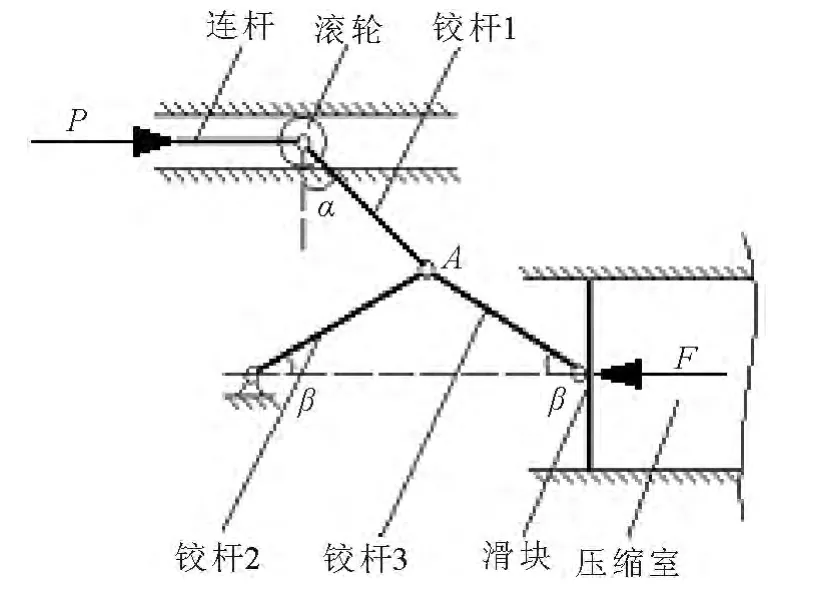
图1 打捆机压缩机构示意图
下面结合图1说明其工作原理.机构的主动力由曲柄输出,假定作用在连杆上的力为P,在压缩行程时,力P的方向如图1所示,推动滚轮向右运动,铰杆1的压力角α逐渐减小,利用角度放大原理将力第一次放大;同时铰杆1推动节点A向下运动,从而带动铰杆2和铰杆3运动,并使铰杆2和铰杆3的压力角β逐渐减小,将力第二次放大;随着压力角β的减小,铰杆3推动滑块向右运动,完成对秸秆的一次压缩.
随着曲柄的转动,当作用在连杆上的力为反方向时,机构进行与前述相反的运动,滑块向左运动,为下一次压缩过程做准备.
2 力学分析
2.1 理论压缩力和理论增力系数
在忽略摩擦及能量损耗的前提下,机构输出的压力称为理论压缩力,用Ft表示,理论压缩力与输入力的比值称为理论增力系数,用nt表示.建立图1所示的打捆机压缩机构的力学模型,对其进行力学分析后可得:
理论压缩力:

理论增力系数:

式中:α为压缩行程终止时铰杆1与铅垂方向的夹角;β为压缩行程终止时铰杆2、3与水平方向的夹角;p这机构的输入力.
从公式(2)可以看出,理论增力系数nl的大小与铰杆的压力角α,β有直接关系,随着α,β的减小,理论增力系数迅速增大;当α,β趋近于零时,理论增力系数趋近于无穷大.在工程实际中,考虑到制造精度、机构运行的稳定性等因素,α,β根据工作环境可取 3°~5°.[4]
2.2 实际压缩力和实际增力系数
考虑摩擦等能量损耗后,计算所得的压缩力和增力系数分别叫做实际压缩力和实际增力系数,分别用Fp和np表示.根据文献[5]、[6]计算可知实际压缩力为:
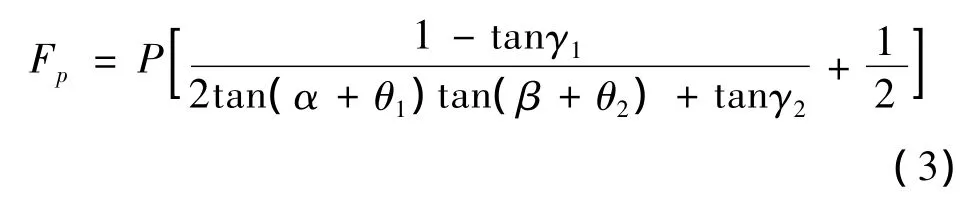
ρ为铰链轴的半径;μ为铰链副的摩擦系数,根据文献[7]可知,通常可取μ=0.1~0.15;l1为铰杆1的长度;l2为铰杆2,3的长度;γ1为活塞与压缩室之间的摩擦角;γ2滑道与滚轮之间的摩擦角.
实际增力系数:

3 应用举例
对于上述压缩机构,如果取 α=5°,β=5°,ρ=8mm,μ=0.15,l1=l2=220mm,γ1=5°,γ2=1°,根据公式(4)计算可得,实际增力系数np≈25,可见,此压缩机构的增力系数相对而言是比较大的.因此,在稻麦秸秆打捆机中采用此压缩机构对于提高打捆机的工作效率、降低散捆率、增大秸秆捆的尺寸具有很大的实际意义.
4 结论
(1)设计了一种将铰杆串联到曲柄滑块压缩机构中的稻麦秸秆打捆机压缩机构,其压缩力利用铰杆的角度效应实现了二级放大,增力系数较大,在打捆机输出压缩力一定的情况下可以有效降低机器的输出功率或增大压缩室的容积.
(2)建立了该机构的力学模型,分析了影响增力系数的主要因素,得出了随着压力角,的减小,机构的压缩力将显著增大的特点,受制造精度等因素的影响,通常,的取值区间为3~5.
(3)该机构结构简单,在不增加成本的前提下,可以串联到现有的打捆机中,实现降低成本、提高压缩效率的目标.
[1] 朱聪玲,王述洋,李滨,等.生物质裂解旋转锥式热解液化反应器的设计研究[J],佳木斯大学学报(自然科学版),2006,24(1):46-48.
[2] 高利伟,马林,张卫峰,等.中国作物秸秆养分资源数量估算及其利用状况[J],农业工程学报,2009,25(7):173 -179.
[3] 陈锋.大方捆打捆机压缩机构设计及压缩试验研究[D],北京:中国农业机械化科学研究院,2007,7.
[4] 刘新柱,周海波,姜庆昌.铰杆——斜楔式气动夹具增力机构设计及力学分析[J],液压与气动,2011,4:86 -87.
[5] 司广琚,钟康民.绿色夹具—基于斜楔增力自锁机构的冲击式气动夹具[J].液压与气动,2006,1:73-74.
[6] 陆雯,王兵,钟康民.气动肌腱与铰杆增力机构的三种组合系统及其比较[J].机械设计,2005,2:53-54.
[7] 刘文剑,曹天河,赵维缓.夹具工程师手册[M].哈尔滨:黑龙江科学技术出版社,1992.
猜你喜欢
医疗装备(2023年15期)2023-08-23 08:59:00
轨道交通装备与技术(2022年3期)2022-07-29 07:58:36
冶金设备(2021年2期)2021-07-21 08:44:20
现代畜牧科技(2021年4期)2021-07-21 06:13:10
纺织检测与标准(2020年4期)2020-08-30 07:50:46
科教新报(2020年21期)2020-06-05 14:16:07
制造技术与机床(2019年7期)2019-07-22 03:43:06
制造技术与机床(2019年7期)2019-07-22 03:42:28
装备制造技术(2018年5期)2018-07-11 03:04:16
农机化研究(2016年10期)2016-03-23 07:21:58
