基于PLC控制的模糊自整定PID变量喷雾控制系统
2014-07-05 16:25:01董志明宋乐鹏
山东农业大学学报(自然科学版) 2014年4期
董志明,宋乐鹏
重庆科技学院电气与信息工程学院,重庆401331
基于PLC控制的模糊自整定PID变量喷雾控制系统
董志明,宋乐鹏
重庆科技学院电气与信息工程学院,重庆401331
变量喷雾控制系统具有非线性、时变性、大滞后等特点,常规PID控制不能满足变量喷雾控制系统在实际作业中理想的控制效果。因此提出了一种基于PLC控制的模糊自整定PID控制方法。PLC控制的模糊自整定PID控制结合了PLC控制灵活、多变和自适应模糊控制等特点,通过对变量喷雾控制系统的数学建模,建立了以电动PI调节阀为核心的模糊自整定PID控制系统。利用Matlab/Simulink和模糊逻辑工具箱对普通模糊PID控制系统和基于PLC控制的模糊自整定PID控制系统进行Simulink仿真研究。实验结果表明,基于PLC控制的模糊自整定PID控制比常规PID控制在非线性、时变性、减小超调量的方面具有更好的控制品质。
变量喷雾控制系统;PL;模糊自整定PID控制
压力和流量是变量喷雾控制系统中的重要物理参数,而一般的变量喷雾控制系统受环境、器材误差的影响较大,具有非线性、时变性、大滞后等特点。常规PID控制至适应于理想的线性控制系统[1],对于这种具有非线性、时变性、大滞后等特点的控制系统不能满足控制要求,达不到理想的控制效果。因此对于这一缺点,本文提出了一种基于PLC控制的模糊自整定PID控制的变量喷雾控制系统[2]。其基本思路是利用PLC的灵活方便和模糊逻辑控制工具箱对PID控制器进行在线调整,满足其控制要求。通过MATLAB仿真[3]表明,基于PLC控制的模糊自整定PID控制比常规PID控制在鲁棒性、超调量调节等有更好的控制效果。
1 被控对象的选定
变量喷雾控制系统选取电动PI调节阀为被控对象,调节阀是可调开度,继而控制系统喷雾量的大小。根据变量喷雾控制系统的压力、流量传感器的反馈数据,控制电动调节阀开度的大小。电动调节阀本身是一种比较复杂的控制系统,可以简单的看做是一个纯滞后的二阶系统来描述[3]:

式中:K——放大系数;τ——纯滞后时间;T1和T2——时间系数。
在实际的系统中,K、T、τ0等参数会随着变量喷雾控制系统的压力、流量以及环境温度等因素而变化。
2 模糊自整定PID控制器的设计
常规PID控制器系统主要由PID控制器和被控对象组成,其控制规律为:

式中,e(t),u(t)分别为PID控制器的输入和输出,Kp为比例系数,Ki为积分时间常数,Kd为微分时间常数。e(t)=r(t)-y(t)为偏差信号,u(t)为控制变量r(t)为设定的参考输入值。
2.1模糊自整定控制的结构图
模糊自整定PID控制器以误差e和误差变化ec作为输入(利用模糊规则在线对PID参数进行修改),可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了模糊自整定PID控制器。

图1 模糊自整定PID结构图Fig.1 Fuzzy self-tuning PID structure diagram
2.2模糊自整定PID控制器算法设计
根据变量喷雾控制系统的物理模型和专家经验,选择误差e和误差变化ec作为模糊控制器的输入变量;ΔKp、ΔKi、ΔKd为模糊控制器的输出。经过模糊化处理得到模糊语言变量E和Ec,其模糊子集均为{NB,NM,NS,ZR,PS,PM,PB},同理输出的ΔKp、ΔKi、ΔKd的模糊子集也均为{NB,NM,NS,ZR,PS,PM,PB}。选取模糊语言变量E、Ec以及ΔKp、ΔKi、ΔKd的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并且E、Ec服从三角形隶属函数曲线分布,ΔKp、ΔKi、ΔKd则服从高斯型隶属函数曲线分布。在Mat lab命令窗口中键入Fuzzy命令,打开Fiseditor,进入Member ship function editor,编辑输入、输出量的隶属度函。
2.3模糊自整定PID控制规则表及模糊推理
根据变量喷雾控制系统的物理模型和专家经验,选择误差e和误差变化ec作为模糊控制器的输入变量;ΔKp、ΔKi、ΔKd为模糊控制器的输出[6]。经过模糊化处理得到模糊语言变量E和Ec,其模糊子集均为{NB,NM,NS,ZR,PS,PM,PB},同理输出的ΔKp、ΔKi、ΔKd的模糊子集也均为{NB,NM,NS,ZR,PS,PM,PB}。选取模糊语言变量E、Ec以及ΔKp、ΔKi、ΔKd的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并且E、Ec服从三角形隶属函数曲线分布,ΔKp、ΔKi、ΔKd则服从高斯型隶属函数曲线分布。在Matlab命令窗口中键入Fuzzy命令,打开Fiseditor,进入Member ship function editor,编辑输入、输出量的隶属度函如图2、3、4所示:

图2 E的隶属函数曲线Fig.2 Membership function curve of E

图3 Ec的隶属函数曲线Fig.3 Membership function curve of Ec

图4 ΔKp、ΔKi、ΔKd的隶属函数曲线Fig.4 Membership function curve of ΔKp、ΔKi、ΔKd
通过模糊自整定优化后的模糊控制规则表如表1、2、3所示,其中:ΔKP为模糊控制输出PID参数中P的增量,ΔKi为模糊控制输出PID参数中I的增量,ΔKd为模糊控制输出PID参数中D的增量,E为误差,EC为误差变化率。

表1 ΔKp模糊控制规则表Table 1 The fuzzy control rules of ΔKP

表2 ΔKi模糊控制规则表Table 2 The fuzzy control rules of ΔKi

表3 ΔKd模糊控制规则表Table 3 The fuzzy control rules ofΔK
模糊自整定PID控制器工作流程图如图5所示:

图5 PID控制器流程图Fig.5 Flow chart of PID controller
3 仿真结果
采用MATLAB对模糊自整定PID控制的变量喷雾控制系统的模型进行仿真[4],在MATLAB的仿真软件中,采用Simulink和模糊逻辑控制箱实现模糊自整定PID控制。据已建立的数学模型推导出变量喷雾控制系统的传递函数如下:

在Simulink中对常规PID控制的变量控制系统进行仿真,其常规PID的三大参数分别为Kp=3.0,、Ki=1.0、Kd=0.9。其仿真结果如下图6、7所示:
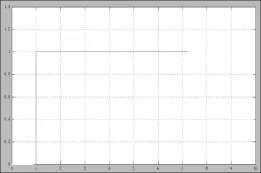
图6 常规PID仿真图Fig.6 The simulation of conventional PID
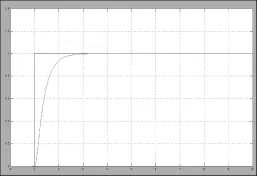
图7 模糊自整定PID仿真图Fig.7 The simulation of fuzzy self-tuning PID
由上述及MATLAB仿真结果可以看出常规PID控制的超调量比较大,大约有32%。而模糊自整定PID控制则超调量比较小约为1.3%。因此模糊自整定PID控制优于常规PID控制。
4 变量喷雾控制系统PLC控制
4.1变量喷雾控制系统主程序设计
变量喷雾控制系统的电动调节阀,以西门子PLC的S7-200编程软件编程来控制电动调节阀,变量喷雾控制系统的全部功能由PC机配合相关的外围电路实现。
4.2变量喷雾控制系统子程序设计
变量喷雾控制系统程序设计过程中,为了提高程序设计的效率,采用结构化和模块化的程序设计思想。整个程序分为3个功能模块进行设计,分别为压力传感器的PID控制子程序、流量传感器的PID控制子程序和模拟信号给定PID子程序。

图9 压力传感器PID模块流程图Fig.9 Flow chart of pressure sensor PID module

图8 系统的主程序流程图Fig.8 Main program flow chart of the system
4.2.1 压力传感器的PID控制子程序为了在实验中能够得到压力测量较高的精确值,需要对压力传感器进行PID程序的编程,其流程图如下图9所示。
流量传感器在实验中测量水流量的大小,在控制过程中要得到较精确的数据,其PID程序流程图同压力传感器大致相同。
4.2.2 模拟信号给定PID子程序为了能使电动调节阀有明确的信号输入,使调节阀能够按照人为的思想进行开度的调节,达到预期的试验效果。因此在PID控制子程序中加入人为给定的一个模拟量信号(图10)。
4.3变量喷雾控制系统中断程序设计
变量喷雾控制系统中断程序满足结构化程序的特点,提高程序设计的效率。其最大的特点就是响应迅速,在触发中断源后,它可以终止程序的执行,转而执行中断程序加快了程序进程。变量喷雾控制系统的中断PID控制流程图如图11所示:

图10 模拟给定信号PID流程图Fig.10 PID flow chart of given analog signal

图11 中断程序PID流程图Fig.11 PID flow chart of interrupt program
4.4变量喷雾控制系统PLC控制效果
在PLC中编写自适应模糊变量规则表,根据输入误差和误差变化率,通过模糊规则表查表求得模糊输出,将模糊输出反模糊化,反模糊化的结果控制变量喷雾阀的电机,进而控制变量喷雾的喷雾量。经过实验表明,PLC控制变量喷雾效果为:模糊PID控制的超调量最大不超过5.6%,响应时间为0.78 s,峰值时间为1.56 s,该效果完全达到精准农业喷雾求。
5 结论
针对复杂的变量喷雾控制系统,本文提出了基于PLC控制的模糊自整定PID控制器。总结这种控制器的控制特点,通过仿真实验结果表明,模糊自整定PID控制具有良好的调节效果。在超调量、控制精度、鲁棒性等性能上优于常规PID控制效果,具有很好的控制精度,超调量很小,控制效果和鲁棒性好。
[1]林屹,叶小岭.模糊自校正PID液位串级控制系统设计与仿真[J].实验室研究与探索,2010,29(3):17-20
[2]姚永刚,孟昕元,张雷.一种非线性PID控制算法在卡车ABS中的应用及仿真研究[J].机械科学与技术,2006,25(8): 956-959
[3]胥军,方彦军.模糊推理自整定PID控制及其在PROFIBUS控制器中的应用[J].仪表技术与传感器,2006(5):35-36
[4]范子荣,张友鹏.基于温度系统的模糊自适应PID控制器的设计与仿真[J].兰州交通大学学报,2006,25(3):92-95
[5]曹光明,吴迪,张殿华.基于模糊自适应PID的铸轧机结晶器液位控制系统[J].控制与决策,2007,22(4):399-402
[6]朱海荣,姜平,杨奕,等.一种模糊PID控制器在制浆蒸煮过程中的应用[J].计算机工程,2007,33(7):222-224
Fuzzy Self-tuning PID Variable Spray Control System Based on PLC Control
DONG Zhi-ming,SONG Le-peng
SchoolofElectrical&InformationEngineering,ChongqingUniversityofScienceandTechnology,Chongqing401331,China
Variable spray control system has nonlinear,time-varying,big lag,etc.Conventional PID control can't satisfy the variable spray control system in the actual operation of the ideal control effect,so as to put forward a fuzzy self-tuning PID control based on PLC control method.PLC control of the fuzzy self-tuning PID control combined with PLC control flexible, changeable and adaptive fuzzy control,etc.through the mathematical modeling of variable spray control system,set up electric PI regulator for the core of the fuzzy self-tuning PID control system.Using Matlab/Simulink and fuzzy logic toolbox to general fuzzy PID control system and fuzzy self-tuning PID control based on PLC control system with Simulink simulation.The experimental results showed that fuzzy self-tuning PID control based on PLC control had the better quality than the conventional PID control in the nonlinear,time-varying and the reduce of the overshoot amount.
Variable spray control system;PLC;fuzzy self-tuning;PID control
TP 273
A
1000-2324(2014)04-0536-05
2013-03-11
2013-04-15
重庆市应用开发计划项目(cstc2014yykfA80012)
董志明(1974-),男,汉族,江苏南京人,副教授,博士,主要从事自动化技术与装备研究.
猜你喜欢
仪器仪表用户(2022年10期)2022-09-29 04:36:58
仪器仪表用户(2022年9期)2022-08-30 05:39:48
仪器仪表用户(2022年4期)2022-04-01 03:17:02
石油化工自动化(2018年5期)2018-11-14 02:34:26
河南科技(2016年8期)2016-09-03 08:08:22
河南科技(2016年6期)2016-08-13 08:18:29
中国科技纵横(2015年2期)2015-11-05 02:30:11
科学中国人(2014年16期)2014-11-20 02:50:00
浙江共产党员(2014年12期)2014-07-10 03:30:06
中国新技术新产品(2014年3期)2014-03-24 07:39:08