
基于SUSAN算子的嘴部轮廓特征提取方法
2014-07-02 00:30戚银城杨秀芳
电视技术 2014年23期
戚银城,苑 清,李 婷,杨秀芳
(华北电力大学电气与电子工程学院,河北保定071003)
基于SUSAN算子的嘴部轮廓特征提取方法
戚银城,苑 清,李 婷,杨秀芳
(华北电力大学电气与电子工程学院,河北保定071003)
针对人脸识别中的嘴部定位部分轮廓缺失问题,提出了一种由粗到精的快速准确的嘴部轮廓特征提取方法。该方法是在人脸检测的基础上采用改进的SUSAN算子提取嘴部边缘轮廓信息,通过几何特征和搜索区域相结合的方法实现了嘴唇轮廓的精确定位。仿真结果表明,该定位方法快速有效,正确率较高。
轮廓提取;人脸检测;SUSAN算子
嘴唇轮廓提取是采用图像分割的方法将人体面部的嘴巴部分准确地分割出来,是进一步进行人脸状态分析、唇读识别和驾驶疲劳判别的基础。为了提取嘴唇轮廓信息,学者们提出了很多方法,如通过在嘴唇涂抹口红加大对比度[1],利用提取红色信息进行嘴唇的边界提取。但是在实际图像中嘴唇的红色信息不是那么明显,无法达到实际的提取效果。基于Snake模型的嘴唇轮廓提取[2-3]需要人工进行初始值的确定以及多参数优化的求解,而且是通过多次迭代计算外部能量函数,运算速度比较慢。基于图像的方法就是将图像看作一个二维矩阵,然后对矩阵中的数据进行某种变换将图像矩阵从一个空间变换到另一个易于分割的空间的方法,包括尺度空间分析方法[4-5]、“特征嘴唇”方法。该方法的优点是信息损失量少,缺点是冗余度较高,计算量较大,而且对光照、旋转、伸缩变化比较敏感。本文在嘴部特征提取中选择一种融合嘴部的几何特征和改进的边缘角点检测SUSAN算子进行嘴部轮廓提取的方法。
1 嘴唇边缘特征提取原理介绍
1.1 SUSAN算子
SUSAN(Small Univalue Segment Assimilating Nucleus)是最小吸收核同值区的缩写。该算子是一种基于灰度的特征点提取方法[6]。SUSAN算子的基本原理是:选取3× 3或者7×7的近似圆形模板,圆形模板在图像上移动,将模板内像素点的灰度值与模板中心像素点的灰度值进行作差运算。设定门限值为t,假如差值小于t,则认为该点与模板具有相同的灰度值,最后统计模板内满足上述条件的像素组成的区域,并称此区域为吸收核同值区(简写为USAN)。由图1中的a可以看到,当圆形模板完全处在目标区域时,USAN面积最大;当圆形模板逐渐向目标边界滑动时,USAN面积逐渐变小,如图1中c的USAN面积为模板面积的一半多;如图1中d的USAN面积为模板面积的一半;当圆形模板向目标边界角点移动的时候,USAN面积变为模板总面积的1/4,如图1中的e;当继续向背景区域移动时,USAN面积逐渐增大,直到最后完全处于背景区域,此时USAN面积再次达到最大,如图1中的b所示。
由此可以看到,在图像的边缘或角点处的USAN面积最小,因此可以根据计算USAN的面积大小来实现图像的边缘检测、角点检测。而且,此方法简单有效,计算速度快,可以有效地去除图像中的部分噪声点。
本文使用的是一个7×7的包含关于中心对称的37个像素的圆形模板,半径为3.5个像素,如图2所示。
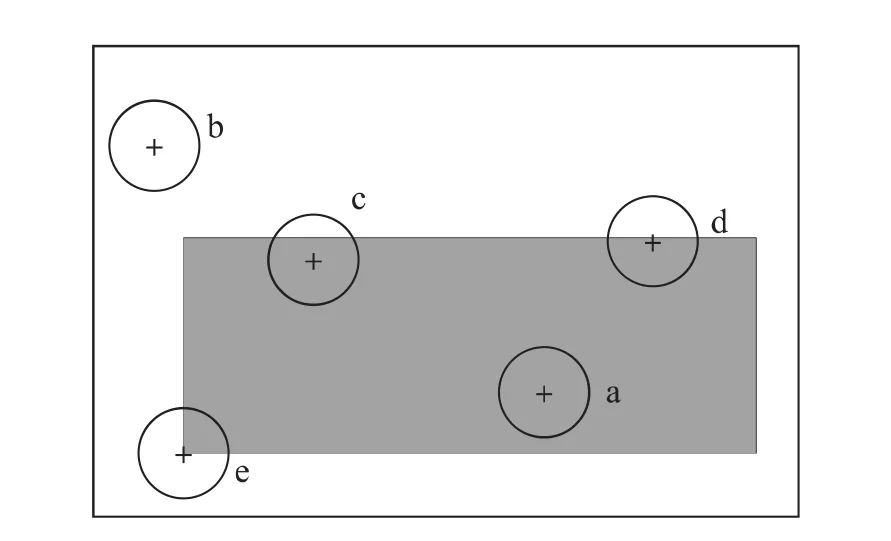
图1 SUSAN特征检测原理
图2 SUSAN算法圆形模板
将模板中每个像素的灰度值与模板中心的灰度值进行差分与阈值t比较,当差分结果大于阈值t设置为0,当差分结果小于t设置为1,计算公式为

在实际应用中常采用式(2)计算

式中:r和r0分别表示模板中心点的值以及模板内其他坐标点的值,c(r,r0)代表的是计算结果,I(r)代表的是该点的灰度值,t为灰度阈值。
USAN区域的值最终由式(3)计算

最后,通过式(4)求得图像的边缘角点初始响应,其中g为几何阈值

由式(4)得到的边缘角点初始响应满足了USAN面积越小,边缘角点响应越大的原理。因此,可以通过以上计算对图像中的角点信息进行增强,判别出边缘角点所在位置。
1.2 改进的SUSAN角点提取算法
上面是对SUSAN算子原理的基本介绍,可以看出,在SUSAN算子中阈值的设置对边缘信息的提取有着很大的影响,阈值取得太高,容易丢失边缘信息,阈值取得太低,会增加部分背景信息,进行误判别。
而阈值t的大小决定了SUSAN算子所能检测出的边缘角点信息的多少。t的值如果取得越小,则检测到的角点就越少,边缘信息越不明显。t的值如果取得越大,则检测到的角点就越多,边缘信息越明显,但此时就有可能把其他信息误检为边缘信息。本文中采用的是改进的SUSAN算子进行阈值分割[7],采用一种对t值自适应的方法,使SUSAN针对不同的图像能够自动根据图像的整体灰度进行阈值设置,计算出最佳阈值。
把模板中每个点的灰度值I(r)与中心点的灰度值I(r0)作差值运算,然后取平均值作为迭代的初始值T0,即

根据确定的初始值计算下一个迭代值
式中:m为像素点的灰度值;Cmax为最大的灰度差值;Ti为第i次的迭代阈值;h(m)为一次迭代中灰度差值为m所对应的个数。每进行一次迭代后判断︱Ti+1-Ti︱= 0是否成立,若成立则停止迭代,并把此次计算得到的Ti作为最终的SUSAN模板的灰度阈值。经过改进后的阈值可以很好地检测到不同对比度下的图像边缘。
图3a是一幅人脸下半区域图像,图3b是利用SUSAN算子对嘴唇图像进行简单阈值分割的图像。
2 嘴唇轮廓的精确定位和提取
2.1 几何约束
经SUSAN算子分割后的图像只剩下嘴部边缘、鼻孔边缘、脸颊边缘等信息。众所周知,人的嘴部在脸部上的相对位置和大小都是固定不变的,处在人脸的下半部分的中间位置。为了精确地定位嘴部区域,排除非嘴部区域以及边界区域,进行如下操作:
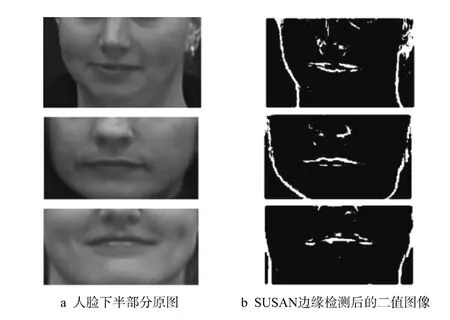
图3 SUSAN算子阈值分割结果
1)经SUSAN算子分割后的脸庞边界信息仍保留下来,根据嘴部的几何位置,通过排除边界连通区域剔除掉这些非嘴部信息。
2)剩下的区域主要有鼻孔边界信息和若干脸部区域内的小的连通区域,通过设置1×1的结构元素进行腐蚀操作去除小的连通区域以及鼻子与嘴部周围的连接区域。
3)对剩余的区域再进行3×3的膨胀处理,使嘴部的边界非连通域连接起来,增大嘴部区域的面积。
当然,说成圣人下凡的基本上是女人居多。女人就是喜欢这些小枕头啊小坐垫啊这类小恩小惠,男人嘛在开玩笑时还是要开的,尤其是在老樟树下,荤段子还是要跑的。但大家心知肚明,感觉还是好的。
4)由于嘴部区域内像素总数大于人鼻孔的面积(鼻孔部分为2个较小的连通域),根据最大连通域提取出嘴部区域,并进行标框显示。
2.2 嘴部区域部分缺失下的轮廓提取
通过以上的检测有时也会出现嘴部区域的部分缺失,针对此类问题,本文提出了一种通过横向搜索左右邻域的满足特征的方法进行缺失区域的弥补方法。
首先,对检测的区域进行判别:嘴部的左嘴角距离左脸颊的距离为m1,右嘴角距离右脸颊的距离为m2(如图4),TT=︱m1-m2︱,如果TT>L×0.5,则判断嘴部有可能存在部分缺失未检测到,其中L代表检测出的嘴部的宽度。

图4 嘴部几何形状
接着,判断m1和m2的大小,当m1<m2时,说明嘴部右边有可能存在缺失,接着搜索已经检测到的嘴部的右边区域,若存在满足S(x)>0.25S的区域(其中,S(x)为嘴部边界满足特征的区域面积,S为已经检测到的嘴部区域面积),则保留下来,并判别为缺失的嘴部区域;当m1>m2时,方法类似。
最后,对检测到的嘴部区域进行标框显示。
图5为经过SUSAN算法处理后存在嘴部丢失部分轮廓信息的图像,图6为通过本文方法的检测结果。由图可知,本文的方法弥补了由SUSAN算法检测时出现的部分嘴部缺失下的不足,提高了检测嘴部轮廓的正确率,有很好的鲁棒性。
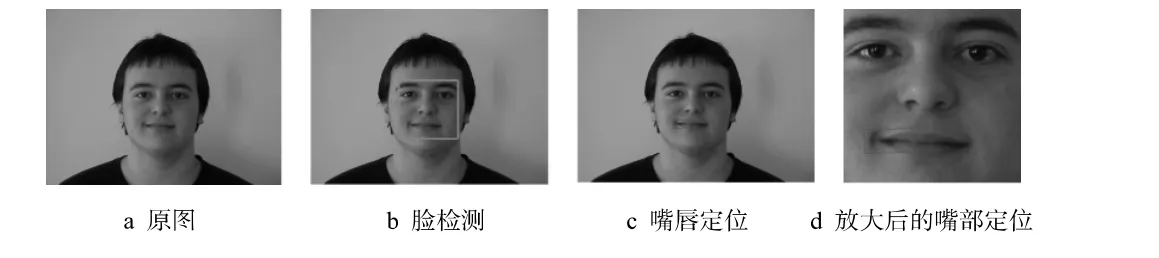
图5 唇部定位缺失实验图

图6 唇部精确定位实验图
3 实验结果分析
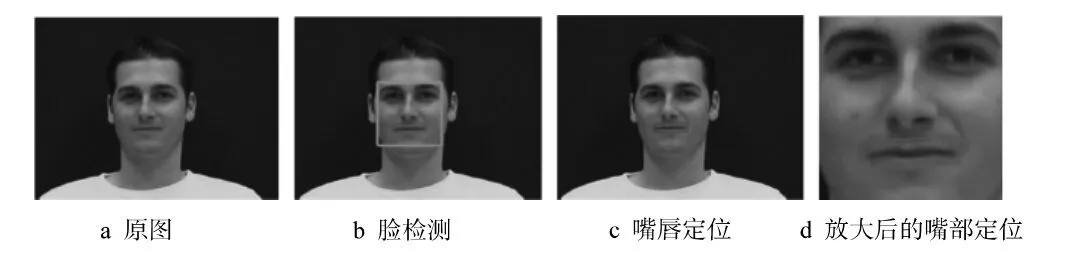
图7 唇部精确定位实验结果(正面图像,唇部闭合)

图8 唇部精确定位实验结果(正面图像,唇部张开)
测试其检测率和正确率,检测率和正确率的计算为

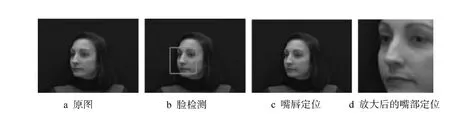
图9 唇部精确定位实验结果(头部旋转,唇部闭合)
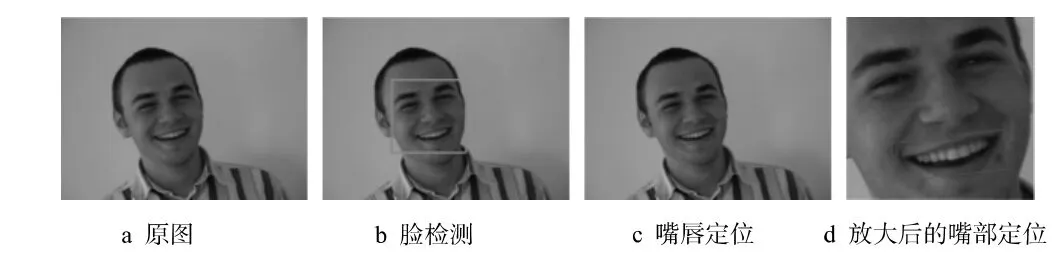
图10 唇部精确定位实验结果(头部旋转,唇部张开)

对本文算法与常用的唇色与肤色差异性的唇部检测算法[1]进行了比较,结果见表1。

表1 本文算法与文献[1]算法比较结果
由表1可知,在两种人脸数据库下本文方法对嘴部的定位正确率都能达到77%以上,表明了该算法在人嘴部张开和闭合以及头部偏转情况下都具有很好的检测效果,算法计算简单,准确率高。文献[1]方法的定位正确率只有71%,原因是图像中嘴角处的区域常出现丢失检测以及当图像中存在近红色区域时定位不够准确。对比试验表明,本文提出的算法检测精度更好,而且对于光线比较暗和头部有一定倾斜的人脸图像,具有一定的鲁棒性。
4 结论
针对传统的嘴唇轮廓提取易出现部分边缘丢失的问题,本文提出了一种改进的嘴唇轮廓提取方法。首先采用改进的SUSAN算法进行嘴部轮廓的初步定位,然后通过几何约束和搜索区域相结合的方法进行嘴唇轮廓部分缺失下的精确定位和轮廓提取。该方法计算简单,准确率较高,适用于人嘴部张开和闭合以及头部偏转情况下嘴唇的精确定位和轮廓提取。
[1]张玲,蔡春花,何伟.唇色与肤色差异性的唇部检测算法的研究[J].计算机工程与应用,2012,48(30):182-186.
[2]余健仪,郑胜林,潘保昌,等.基于改进的snake模型的嘴唇轮廓提取[J].计算机技术与发展,2008,18(8):95-100.
[3]汤敏,王元全,夏德深.基于Snake模型的嘴部特征分割[J].计算机工程,2005,30(21):7-9.
[4]王鹏伟,吴秀清,张名成.基于多尺度形态学融合的分水岭图像分割方法[J].数据采集与处理,2007,21(4):398-402.
[5]高涛.基于小波域多尺度Retinex的复杂光照的人脸识别[J].电视技术,2012,36(5):122-125.
[6]SMITH SM,BRADY JM.SUSAN—A new approach to low level image processing[J].International Journal of Computer Vision,1997,23(1): 45-78.
[7]罗忠亮.基于改进SUSAN算子的图像边缘检测算法[J].重庆工学院学报:自然科学版,2009,23(5):102-106.
[8]PEER P.CVL face database[J].International Journal of Computer Vision,1997,23(1):45-78.
对两篇学术不端文章的处理声明
近日本刊接到举报,《电视技术》2014年第11期署名为李文琴等的文章《面向QoS的低复杂度宽带混合频谱接入算法》和2014年第13期署名为田亮等的文章《基于能效管理的认知车载网络频谱接入方案》存在严重抄袭问题,编辑部经过调查后认为:上述两文抄袭情况属实;本刊在审稿过程中严格执行了审稿程序,并借助科技期刊学术不端文献检测系统进行检测,但该系统对比数据库的文献实际入库时间滞后于文献发表时间,因此在本刊审稿时未能检测出抄袭问题,本刊审稿人也未能发现抄袭问题。本刊对被抄袭文献作者以及广大读者表示歉意,我们将进一步加强审稿工作。另外,本刊坚决反对此类学术不端行为,为了进一步严肃学术与出版风气,经本刊研究决定,对此次事件作出严肃处理,特将处理情况声明如下:
1)撤销本刊对上述两篇学术不端文章的录用,原录用证明作废。
2)五年内拒绝上述两篇学术不端文章第一作者(李文琴、田亮)的投稿。
特此声明。
《电视技术》编辑部
2014年11月
M outh Contour Feature Extraction Method Based on SUSAN Operator
QIYincheng,YUAN Qing,LITing,YANG Xiufang
(School of Electrical and Electronic Engineering,North China Electric Power University,Hebei Baoding 071003,China)
Formissing problem of partial contour ofmouth positioning in face recognition ,a rapid and exactmethod to extract themouth contour feature from coarse to fine is proposed.On the basis of face detection,mouth edge profile information is extracted by the improved SUSAN operator.Combining with geometric features and searching area,the positioning of themouth contour is accurately realized.Simulation results show that themouth contour positioningmethod is fast and valid,and it has a high accuracy.
contour extraction;face detection;SUSAN operator
TN911.73;TP391.41
A
戚银城(1968—),教授,硕士生导师,主要研究方向为电力信息分析与处理、语音与图像处理;
苑 清(1988—),硕士生,主要研究方向为图像处理;
李 婷(1988—),女,硕士生,主要研究方向为图像处理;
杨秀芳(1987—),女,硕士生,主要研究方向为图像处理。
��健男
2014-02-17
【本文献信息】戚银城,苑清,李婷,等.基于SUSAN算子的嘴部轮廓特征提取方法[J].电视技术,2014,38(23).
中央高校基本科研业务费专项资金项目(13XS27)
猜你喜欢
装备制造技术(2020年1期)2020-12-25
中学生博览·文艺憩(2020年12期)2020-12-23
黄河之声(2020年19期)2020-12-07
制造技术与机床(2019年11期)2019-12-04
新课程·下旬(2019年3期)2019-05-08
电子技术与软件工程(2018年10期)2018-07-16
农业工程学报(2018年10期)2018-06-05
中国交通信息化(2017年4期)2017-06-06
电子科技(2016年12期)2016-12-26
系统工程与电子技术(2016年4期)2016-08-24
