
BDS/GPS/GLONASS融合定位模型及性能分析
2014-06-27 05:47李鹤峰党亚民秘金钟谷守周张德成
测绘通报 2014年9期
李鹤峰,党亚民,秘金钟,谷守周,张德成
(1.国核电力规划设计研究院,北京 100095;2.中国测绘科学研究院,北京 100830;3.国家测绘地理信息局第一大地测量队,陕西西安 710054)
BDS/GPS/GLONASS融合定位模型及性能分析
李鹤峰1,2,党亚民2,秘金钟2,谷守周2,张德成3
(1.国核电力规划设计研究院,北京 100095;2.中国测绘科学研究院,北京 100830;3.国家测绘地理信息局第一大地测量队,陕西西安 710054)
针对传统GNSS单星座系统定位存在的诸多不足,基于单点定位,给出建立在时空统一上的BDS/GPS/GLONASS多模融合定位模型,并对实测三系统数据分不同方案进行定位解算,分析各方案的可见卫星数、精度衰减因子(DOP)及定位精度。结果表明,BDS/GPS/GLONASS融合系统可见卫星数大幅提高,DOP值显著下降,定位的精度和可靠性优于各单系统。
BDS;GNSS;多频多模;时空统一;融合定位
一、引 言
自GPS问世以来,其在众多领域发挥了无可替代的作用。随着GPS应用范围的扩大和研究的深入,单星座系统如可见星有限、定位精度不高、可靠性不好等诸多弊端浮出水面。GLONASS系统的加入掀起了一轮有关GPS/GLONASS组合定位研究的热潮,并取得了可喜的研究成果[1-3]。随着BDS的不断完善及Galileo计划的实施,国内外学者对组合定位的研究也涉及BDS/GPS、GPS/Galileo等方面[4-6],而对三系统融合定位方面的研究还处于探索阶段,一方面由于BDS没有完全覆盖全球,Galileo还处于试验阶段;另一方面早期BDS有关数据涉及保密,难以获取,而模拟仿真数据不能很好地契合实际的定位效果。鉴于目前条件成熟,本文在单点定位的基础上,详细研究了基于时空统一的BDS/GPS/GLONASS融合定位模型,并利用三系统接收机实地采集数据,基于Visual C++平台,编写多模融合定位程序,对实测数据分不同方案进行定位解算,分析各方案的卫星数、DOP值及定位精度。结果表明,BDS/GPS/ GLONASS融合系统较各单系统可见卫星数大幅提高,DOP值急剧下降,定位精度和可靠性显著提升。
二、基于时空统一的BDS/GPS/GLONASS融合单点定位模型
BDS/GPS/GLONASS融合定位采用空间距离的后方交会,与单系统定位原理基本相同。唯一有所不同的是融合系统涉及3个导航定位星座,而各星座系统的时间框架和坐标框架互不相同。欲实现系统的融合定位,首先要完成系统间的时空统一。图1为BDS/GPS/GLONASS融合单点定位流程图。

图1 BDS/GPS/GLONASS融合单点定位流程
1.时空统一
BDS时间框架采用起算历元为UTC 2006-01-01T00∶00∶00的北斗时(BDT),属原子时(AIT)系统,无闰秒,坐标框架采用2000国家大地坐标系(CGCS2000)[7]。GPS时间框架采用起算历元为UTC 1980-01-01T00∶00∶00的GPST,同属于无闰秒的AIT,BDT与GPST图解关系如图2所示,坐标框架采用WGS-84坐标系;GLONASS时间框架与BDS、GPS定义完全不同,其产生基于GLONASS同步中心CS(Central Synchronize)时间,属UTC系统,此外,GLONASST与UTC(SU)存在有3 h的整数差;坐标框架为俄罗斯地面网与空间网联合攻关平差建立的PZ-90坐标系。BDS、GPS、GLONASS三系统的时间和坐标框架相关参数见表1。
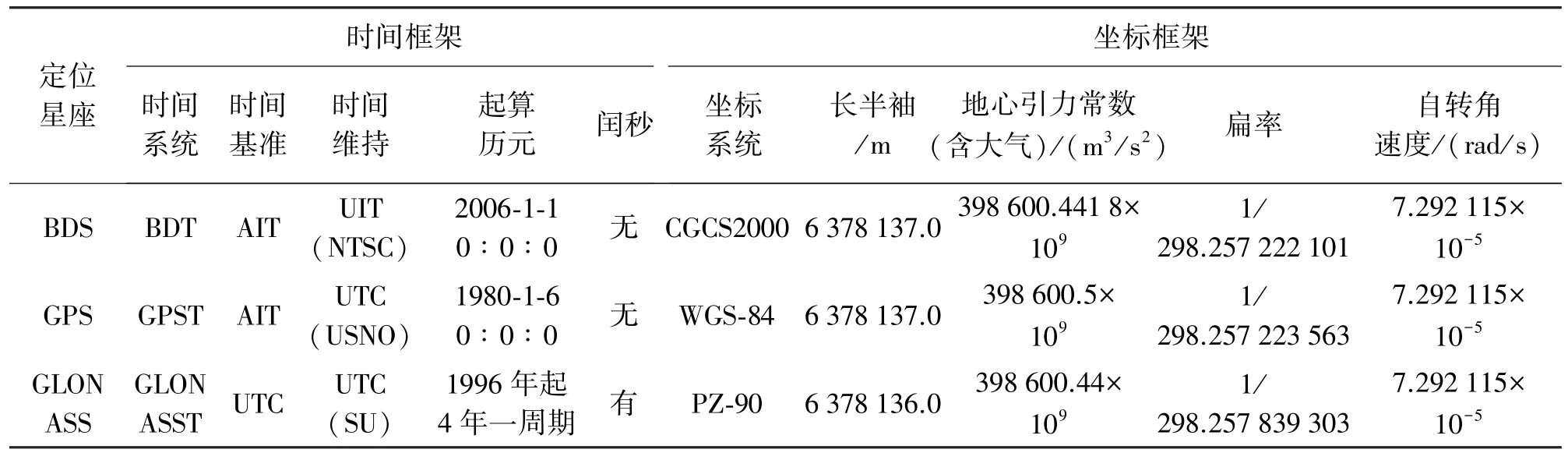
表1 BDS、GPS、GLONASS各系统时间框架和坐标框架参数对比
从表1对比分析可以清晰地看出,BDS、GPS、GLONASS各自的时间和坐标框架互不相同,而融合定位必须建立在同一时空基准上。选取GPST和WGS-84为中间变量,将BDS、GLONASS的时空统一到GPS时空基准下,即三系统融合定位是以GPST为时间框架,得到WGS-84系统下的坐标成果。
借鉴GPS的伪距观测方程[8-9],可以分别得到BDS、GLONASS的伪距观测方程。假设伪距观测量ρ已通过各项误差(大气延迟、卫星钟差、相对论等)改正,各系统的伪距观测方程可表示为

对于时间的统一,由表1可以得到GPST与 BDT之间的图解关系,如图2所示。

图2 BDT、GPST之间的图解关系
从图中可以清晰地得到GPST与BDST的转换关系

由上文可知,GLONASST与UTC有3 h的整数差,但实际多模接收机接收到的GLONASS导航文件中的参数信息并非建立在GLONASST下,而是UTC。通过文献[6]可得GPST与GLONASS系统的UTCGLO间的转换关系

式中,n为国际UTC与AIT之间的调整参数,截至2013年5月,该调整参数n=35。然而,由表1可知,GLONASST的起算历元从UTC时1996年起,4年一周期。因此在定位解算时,顾及该条件,判断当前观测时间的起算历元,起算年后的闰秒不予考虑在内,即对于不同年份的观测数据,n的值不尽相同,这一点要非常注意。
在坐标统一方面,PZ-90到WGS-84的转化按MCC得到的目前国际最高精度的布尔萨七参数改正模型进行转化[8],其七参数改正公式为

由表1可以看出,CGCS2000与WGS-84坐标系的定义几乎一致,魏子卿院士认为CGCS2000和WGS-84是相容的,在坐标系实现精度范围内,CGCS2000和WGS-84是一致的[10]。所以在实际GNSS融合定位中,二者无须转换,可以认为CGCS2000定位成果同属于WGS-84坐标系成果。
2.融合定位模型

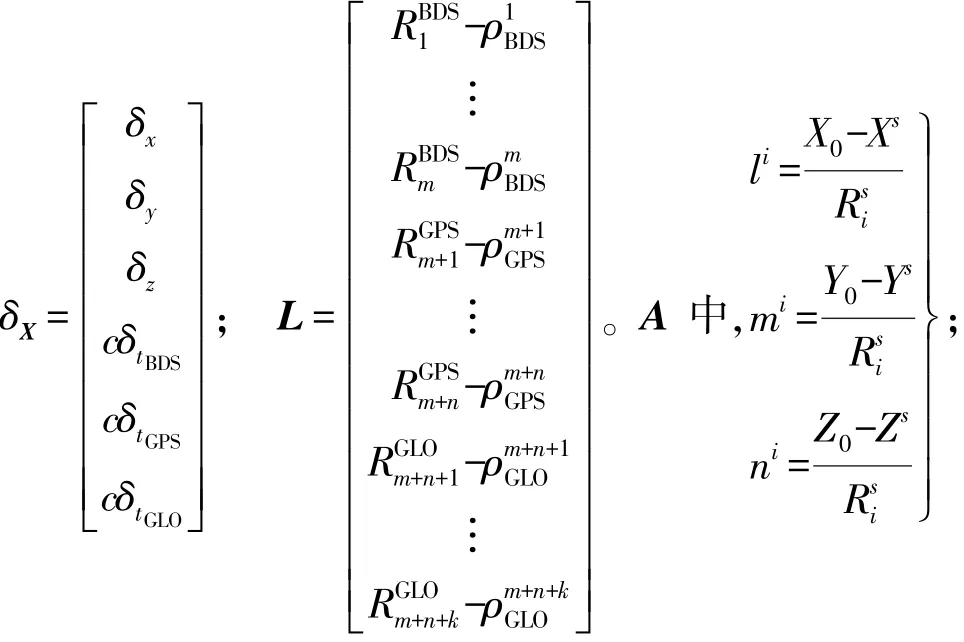
时空统一完成后,设接收机位置坐标为(Xr,Yr,Zr),某星座一卫星位置为(Xs,Ys,Zs),则融合系统的伪距观测方程可由式(1)统一表示为式中,,为接收机到该卫星的几何距离;ρsr对应伪距观测值;δtr为该星座系统下接收机钟差;c为光速。可以看出,融合系统的伪距观测方程形式与单系统的基本一致,不同之处在于时空统一后的三星座系统对接收机延迟误差并不相同。式(4)中含有6个待求参数,因此需要至少同时观测6颗卫星以完成融合定位解算。式(4)的线性化采用在接收机概略坐标(X0,Y0,Z0)处用泰勒级数展开,详见参考文献[9—10],这里不再赘述。当观测卫星大于6颗时,根据冗余观测方程,利用最小二乘法进行求解。假设某一历元分别同时观测到m、n、k颗BDS、GPS、GLONASS卫星,则融合系统的误差方程可表示为(m+n+k),s为不同星座卫星),根据最小二乘求出δX值,进而得到该历元下接收机的位置坐标。为达到较高精度,将解算值回代作为接收机位置初值,对两次解算差值设一门限值,通过迭代计算,实现BDS/GPS/GLONASS高精度融合定位。

三、试验数据处理及分析
基于以上分析,为研究BDS/GPS/GLONASS融合系统的定位性能,于2013-01-08在中国测绘科学研究院位于河北某三系统试验站现场采集数据,接收机采样率为1 s,从15∶00∶00—23∶09∶59共9 h的数据,卫星截止高度角设为10°。基于时空统一的BDS/GPS/GLONASS融合定位模型,笔者以Visual Studio 2010为平台,利用C++语言开发了BDS/GPS/GLONASS定位软件V1.0,分别以①BDS单系统、②GPS单系统、③GLONASS单系统、④融合三系统4种方案进行定位解算,并将定位结果与基准站已知精确坐标求差,将所得各分量残差转化到东北天坐标系(ENU)下,定位残差曲线如图3所示。
通过图3可以直观地看出,融合三系统各分量定位精度较BDS、GLONASS都有大幅提高;而与GPS的残差曲线近似,这是由于BDS、GPS、GLONASS三系统的定位精度各不相同。为了达到较高的精度,在系统融合时对不同的系统配置不同的权值,这里引用参考文献[3]结论,结合各系统的实际定位精度,对GPS、BDS、GLONASS系统按8∶2∶1进行配权,因GPS定位精度较高,配置的权比也相对较大,故而两残差曲线走势较一致。为详细研究定位结果,在图3的基础上,对各分量残差进行统计,结果见表2。

图3 BDS、GPS、GLONASS各单系统及其时空统一融合系统定位残差曲线

表2 BDS、GPS、GLONASS各单系统及其时空统一融合系统定位结果统计
由表2可以看出,通过时空统一,融合系统在N、E、U各分量较各单系统都有不同程度的提高,点位中误差达到2.53 m,较BDS、GPS、GLONASS分别提高68.68%、5.53%、76.54%。可以发现,融合系统较GPS仅提高5.53%,一方面是由于对GPS系统配置的权比较大;另一方面由于本试验测站GPS可见卫星最多达到11颗,最少也有7颗,平均维持在9颗左右,如图4、表3所示,充分多的冗余观测量,GPS单系统定位已达到很高精度(2.678 m)。而GLONASS大部分的可见星不多于7颗,最少时仅为5颗,冗余观测信息不足,必然会影响系统的定位精度。从图、表中还可以看出,BDS可见星维持在8~9颗,虽有充分多的冗余观测量,但是BDS空间卫星为GEO、MEO、IGSO 3种异质卫星构成的混合星座[7]。因5颗GEO卫星相对地球静止且全部可见,虽有相对较高的高度角,但加上其余的卫星整体构成的BDS空间几何结构较差,可以通过表征卫星空间分布优劣的GDOP可以看出这一点,如图4、表3所示。GDOP值越大,表明卫星分布范围越小,空间结构越差,定位精度也相对较低,这也正是BDS、GLONASS定位精度相对较低的直接原因。融合系统较各单系统都有不同程度的提高,从另一方面也论证了即便像GPS有较高的定位精度,通过系统的合理配权融合,依然可以提高定位精度,增加系统的稳定和连续性。

图4 BDS、GPS、GLONASS各单系统及其时空统一融合系统可见卫星数及GDOP值
表3基于图4,详细统计了各系统的可见星数、GDOP值。可以看出,融合系统的可见星数大幅提高,平均达到24.3颗,最大增幅达247.52%,是单系统的3倍还多。卫星数的增加有效改善了空间的卫星布局,GDOP值急剧下降,各系统DOP值降幅在50%左右,进而提高了导航系统的定位精度。可以预见,即便是在复杂环境(森林、峡谷)下,融合GNSS系统也不会因卫星数不足导致无法解算或信号中断,可有效改善系统的可靠性和连续性。
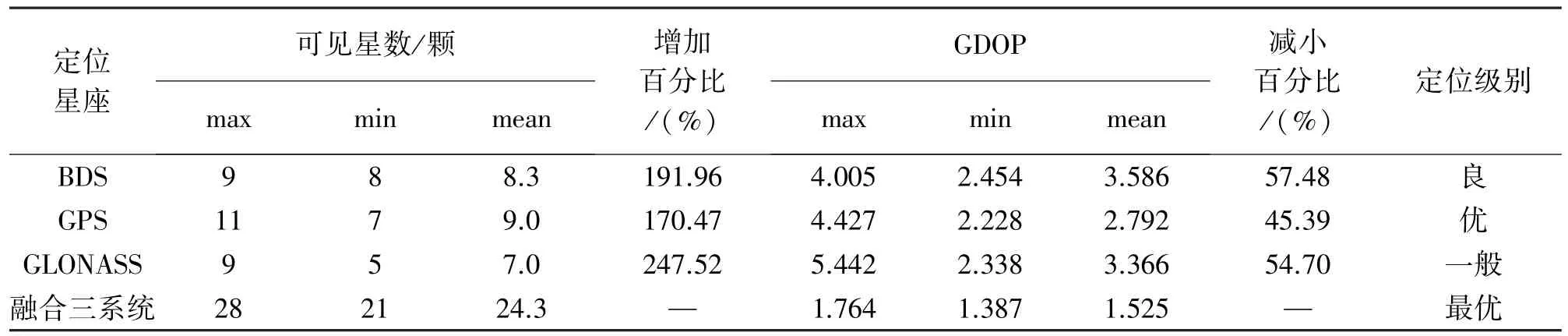
表3 BDS、GPS、GLONASS各单系统及其时空统一融合系统可见星数/GDOP/PDOP统计
四、结束语
传统GNSS单星座系统定位一方面因环境限制(森林、建筑物遮挡)使可见星数目降低,导致定位精度降低甚至发生服务中断;另一方面稳定性不强、自主安全性差,一旦拒绝提供服务而使用户无能为力。特别是BDS当前还仅是覆盖亚太的区域导航系统,为充分利用GNSS资源,最大限度地发挥BDS的优势,为用户提供高精度、高可靠性、高动态的PNT服务,加强GNSS系统间的兼容与互操作,研究GNSS融合定位是当前基于BDS研究的核心和关键技术。
本文以更高精度和可靠性为原则,基于单点定位,在时空统一上建立BDS/GPS/GLONASS融合定位模型,通过三系统实测数据进行融合定位解算。结果表明,BDS/GPS/GLONASS融合卫星导航系统能够提供3倍于单系统的可见卫星数量和导航定位信号,有效改善空间卫星布局,降低精度衰减因子(DOP),大幅提升各导航性能指标,对我国BDS的建设和GNSS多模融合定位的研究具有一定的参考意义。
[1] 高星伟,葛茂荣.GPS/GLONASS单点定位的数据处理[J].测绘通报,1999(4):8-9.
[2] DAI L,RIZOS C,HAN S.An Adaptive Procedure for Carrier Phase-based GPS/GLONASS Positioning[J]. Geomatics Res Australasia,2003(78):19-36.
[3] 蔡昌盛,戴吾蛟,匡翠林.GPS/GLONASS组合系统的PDOP计算和分析[J].测绘通报,2011(11):5-7.
[4] HEWITSON S,LEE H K,WANG JINLING.Localizability Analysis for GPS/Galileo Receiver Autonomous Integrity Monitoring[J].Journal of Navigation,2004,57(2):245-259.
[5] 王潜心,陈正阳,唐利民.基于相对定位模型的GPSGalileo组合定位研究[J].测绘科学,2009,34(1):63-65.
[6] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5):743-748.
[7] 中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件公开服务信号B1Ⅰ(1.0版) [R].北京:[s.n.],2012.
[8] 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007.
[9] 徐绍全,张华海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,2003.
[10] 魏子卿.2000中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学,2008,28(5):1-5.
[11] 陈义.利用精密星历进行单点定位的数学模型和初步分析[J].测绘学报,2002,31(S1):31-33.
Research on Model and Performance of BDS/GPS/GLONASS Multi-mode Fusion Positioning
LI Hefeng,DANG Yamin,BEI Jinzhong,GU Shouzhou,ZHANG Decheng
P228.4
B
0494-0911(2014)09-0001-05
2013-06-27
国家863重点项目(2011AA120503);科技部科技支撑计划(2012BAB16B01);国家863计划(2013AA122501);北斗分析中心建设与运行维护(GFZX0301040308-06)
李鹤峰(1987—),男,河南平舆人,硕士生,主要研究方向为GNSS多模融合定位与RAIM算法。引文格式:李鹤峰,党亚民,秘金钟,等.BDS/GPS/GLONASS融合定位模型及性能分析[J].测绘通报,2014(9):1-5.
10.13474/j.cnki.11-2246.2014.0280
猜你喜欢
四川党的建设(2022年8期)2022-04-28
小学生学习指导(低年级)(2020年11期)2020-12-14
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
作文大王·低年级(2018年10期)2018-12-06
测控技术(2018年6期)2018-11-25
测控技术(2018年4期)2018-11-25
电子制作(2018年19期)2018-11-14
雷达学报(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
