
机载LiDAR基础测绘关键技术及应用
2014-06-27 05:47:27卢小平庞星晨武永斌李国清于海洋
测绘通报 2014年9期
卢小平,庞星晨,武永斌,李 珵,,李国清,于海洋
(1.河南理工大学矿山空间信息技术国家测绘地理信息局重点实验室,河南焦作 454003;2.河南省遥感测绘院,河南郑州 450003)
机载LiDAR基础测绘关键技术及应用
卢小平1,庞星晨1,武永斌2,李 珵1,2,李国清2,于海洋1
(1.河南理工大学矿山空间信息技术国家测绘地理信息局重点实验室,河南焦作 454003;2.河南省遥感测绘院,河南郑州 450003)
针对激光扫描系统高精度检校与相机标定、点云数据滤波处理与高精度DEM构建、地物要素自动提取等技术难题,自主设计建立了机载激光雷达(LiDAR)检校场,实现了LiDAR系统各个组成部分的高精度一体化检校;利用改进的各向异性扩散滤波算法模型有效滤除了高分辨率DEM数据中的高频噪声,提高了等高线提取和水文分析的质量;基于激光点云和高分辨率航空影像构建的面向对象的地物要素主被动遥感协同提取模型实现了居民地、道路等主要地物要素的自动提取。实际应用结果表明,地物要素的整体提取准确度超过90%。
机载激光雷达(LiDAR);基础测绘;高精度检校;协同提取
一、引 言
我国测绘地理信息获取与更新长期以来主要依赖航空摄影测量方法,存在易受天气影响、数据获取周期长、作业效率低等问题,而且在植被高覆盖地区难以获取准确的地面信息,难以满足经济社会发展对测绘地理信息数据现势性的要求。机载激光雷达(airborne light detection and ranging,LiDAR)能够全天时、全天候快速获取各种地表环境下的高精度三维激光点云数据[1],虽然该技术目前已在我国基本比例尺地形图测绘中得到应用,但地物要素提取仍然依靠人工解译的方法,不仅效率低,而且成图质量易受作业员水平和责任心的影响。航空摄影测绘地形图方法中居民地、道路和水系3种主要地形图要素的测绘工作量超过50%,在城市地区甚至超过80%,因此研究LiDAR地物自动提取方法、提升测绘技术的自动化水平是测绘工作者急需解决的技术难题。
激光点云数据系统误差的处理方法可以分成两类:一类是数据驱动方法,通常称为条带平差;另一类为模型驱动方法,也称系统检校[2]。系统检校方法是采用严格的物理模型来描述各项系统误差对于激光点坐标的影响,通过平差直接解算系统误差项。文献[3]对LiDAR系统误差源及检校流程进行了阐述;文献[4]给出了一种分步手工检校方法;文献[5]介绍了利用共面条件进行表面匹配的方法;文献[6]设计了一种安置参数自检校方法。现有的点云滤波方法根据技术路线可分为形态学、基于内插和基于曲面约束3类方法[7],基于内插的方法以Axelsson提出的基于不规则三角网(TIN)加密滤波算法最为典型[8]。程亮等提出了一种LiDAR辅助下利用高分辨率遥感影像进行轮廓提取的方法[9],准确率达到91%。李怡静等采用集成LiDAR和遥感影像分别进行了城市道路提取试验[10-11]。然而,利用机载LiDAR进行系列比例尺基础测绘的研究则鲜有报道。本文针对激光扫描系统高精度检校与相机标定、点云数据滤波处理与高精度DEM构建、地物要素自动提取等进行攻关,解决了关键技术难题,并进行了规模化生产应用。
二、总体技术方法
点云数据具有精确的地物高程信息,航空影像具有高分辨率的纹理、光谱及三维立体影像信息,本文将两者数据源优势互补,开展主被动遥感数据的同化、影像匹配、特征提取、结果评价、地面验证及规模化应用等一系列研究和应用工作,总体技术路线如图1所示。
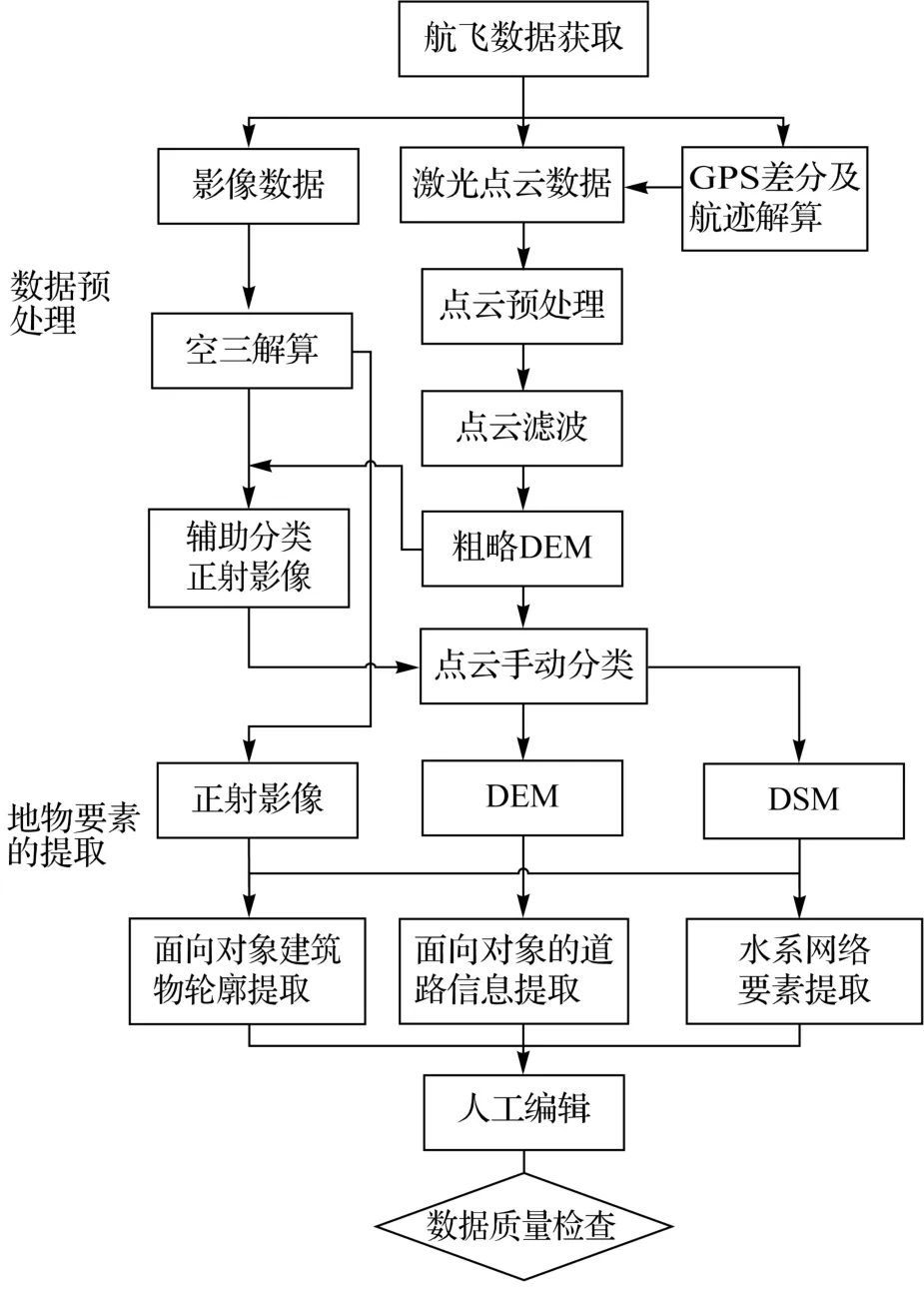
图1 技术路线图
1.LiDAR系统的高级检校
徕卡ALS60 LiDAR系统主要由机载GPS、INS、激光扫描测距系统、数码相机等组成,系统获取的数据精度只与飞行相对高度有关,而不受脉冲频率的影响。
(1)检校场的设计原则
为准确检校ALS60系统的激光扫描仪、IPAS定位定向装置及CCD数码相机的各项系统误差和实际测量精度,必须建立与之相适应的检校场。在设计检校场时应遵循以下原则。
1)检校场环境应与LiDAR系统的实际工作环境相似。
2)检校场的地物分布呈近似“十”字型分布。
3)检校场内应有平地、不同高度的楼房和不同顶部形态的建筑物。
(2)检校场的建立
建立的ALS60系统检校场位于郑州市上街区,范围为3 km×3 km。检校场范围内地势平坦,平均高程约为150 m。区域内建筑物大小及高度适中,数量密集,顶部形态多样,符合检校要求。
2.航飞检校的设计与实施
设计了1350 m和2300 m两个飞行高度,共计8条航线。其中低空交叉对飞2条,反向交叉对飞2条;高航高交叉对飞2条,反向飞行1条,平行飞行30%重叠度1条。
高航高飞行获取的数据用于检校激光数据,低航高飞行的4条航线用于检校RCD相机,航向重叠度为80%,旁向重叠为20%。所有航线视场角FOV均为45°,使用多脉冲模式和最大扫描频率。
3.激光扫描仪检校及精度分析
(1)激光扫描仪的检校
激光扫描仪的检校包括视准轴检校、距离检校、扭转(Torsion)检校、倾斜误差(Pitch error slope)检校和高程偏移检校5项内容。其中,视准轴检校和距离检校称为常规项检校,扭曲误差和倾斜误差检校则为高级项检校的内容。
(2)激光扫描仪的高级项检校
在对LiDAR激光扫描仪检校过程中,发现仅利用出厂检校值无法取得高精度的检校结果,实际工作中仍需要自主对扭曲检校和倾斜误差进行检校,从而提高点云数据的精度和可靠性。
①扭转误差检校的技术流程
扫描条带边缘扫描镜在最大加速度时,其实际镜面位置与编码器计算位置的细微差别称为扭转误差,它与扫描镜旋转轴的弹性和机械性能有关。扭转误差具体的检校流程如下:
a.在平坦地面沿直线布设控制点。选择垂直于地面控制点的航线数据,将Torsion值设为0,并裁剪激光条带数据范围-20°~-50°(条带边缘)。
b.Torsion值设为0,裁剪激光条带数据范围为20°~50°(条带另一边缘)。
c.加载检校场测量的主干道地面高程控制点作为已知点,统计控制点与激光点云的高程差值dz;利用平均dz值,使用双曲线函数计算对应的扭转误差检校值。
②倾斜误差检校的技术流程
倾斜误差是指条带中心与边缘倾斜值的差值。该差值是由于扫描镜在高速旋转时不是严格意义上的平面,从而造成扫描线不直,出现轻微的弯曲。倾斜误差被定义为每度上的弧度值,通常利用高航高上相反航线数据进行校正。具体的检校流程如下:
a.选择高航高对飞的航线数据,该数据在条带边缘具有尖顶房等倾斜地物,并设置Pitch error slope的初始值为0。
b.在两个激光条带边缘选择尖顶房屋(要求屋脊线垂直于航向),并沿航线方向画断面,则尖顶房屋的房顶剖面线之间的偏离就是倾斜误差存在的表现。
c.测量房顶剖面线之间的偏离值。测量房顶剖面线之间的偏离值S,倾斜误差的改正值公式为

式中,H为航高。
通过自主进行的高级项检校,对扭转误差值和倾斜误差值进行了重新标定,提高了激光点云数据的精度和可靠性。高级项检校得到的扭转误差值和倾斜误差值见表1。
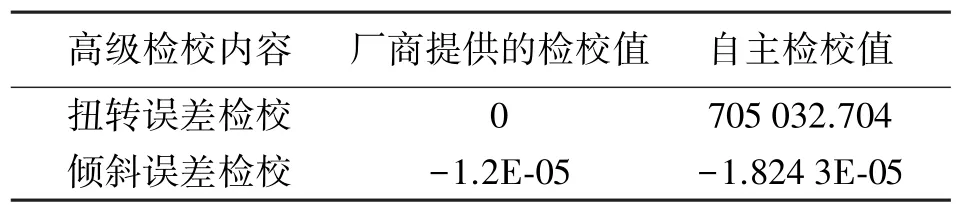
表1 激光扫描仪高级项检校值对比
三、地貌地物要素提取
1.地貌要素提取
本文基于自适应TIN滤波算法[8]对点云进行分类,以获取地面点云数据,然后进行插值运算,得到DEM数据。
(2)DEM噪声平滑
LiDAR获取的数据中包含有大量高频干扰信息,研究中采用各向异性扩散滤波算法对DEM数据进行滤波处理[3-4]。试验表明,该方法能有效去除噪声,同时能够保留地形信息[5]。
(3)等高线生成
从DEM中内插提取等高线的算法大致可分为高次曲面内插法和线性内插法,又可以分为分段内插和整条内插。本文采用先内插跟踪、后拟合的方法,利用DEM数据自动生成等高线。
(4)等高线平滑
由于DEM生成的等高线是由追踪的直线段组成的折线,为使等高线能更准确地描述实际地形变化,必须对其进行平滑处理。本文利用张力样条和三次B样条拟合方法对等高线进行平滑处理,并对这两种方法的平滑效果进行对比分析。
通过对点云数据和DEM反生等高线进行对比分析表明,运用本文研究成果生成的等高线符合规范要求,DLG编辑工作量比直接利用点云生成等高线方法大幅度减少,生产效率显著提高。
2.建(构)筑物要素提取
人文精神关注对个体的自我关怀,也关注对人类集体精神的继承和发展。在初中政治教学中,很多章节都与自我关怀以及认同社会精神文明相关,但是,无论书本阐释得多么清楚,都离不开学生的亲自体验和实践。因此,需要组织相应的教学活动以凸显人文精神。
轮廓提取是建立建(构)筑物数字模型的关键[12-14],综合利用LiDAR点云和影像数据能够获取更准确的建筑物几何信息[15-16]。本文基于面向对象分类的理论建立了一种综合利用正射影像和LiDAR数据的建筑物轮廓协同提取方法[17],即利用LiDAR第一次返回的数据建立数字表面模型(DSM),从DSM中减去DEM,得到地物的高程信息,该模型称为nDSM(normalized digital surface model);基于不同分割算法对nDSM数据进行分割,建立目标对象;通过设定地物高度阈值与亮度阈值确定建筑物区域,去除阴影信息;利用建筑物光谱特征的相似性在较高坡度值的区域精确提取建筑物的轮廓;基于绿度指数去除植被信息,保证建筑物轮廓的完整性。
(1)居民地要素提取
本文以河南省鹤壁市作为试验研究区,选取两处具有代表性的区域进行居民地建筑物提取研究,一处为农村居民地,主要为较低矮的建筑物;另一处是城市居民地,建筑物较为高大。
①农村居民地建筑物提取
试验区1为农村居民地,面积为0.56 km2,提取的nDSM和航空影像空间分辨率分别为0.5 m和0.2 m。航空影像数据使用DSM进行正射校正,并与点云数据完全配准,采用面向对象的分类方法对农村居民地建筑物进行提取。
基于两种类型的形态学算子进一步处理“建筑物”对象的过程为:填充操作,用来填补“建筑物”对象中小于阈值的内孔;闭操作,平滑粗糙的边界,去除建筑物边缘的小缺口。结构元素采用5×5,农村居民住宅可通过nDSM高度阈值予以区分。图2为试验区1的建筑物轮廓提取结果。
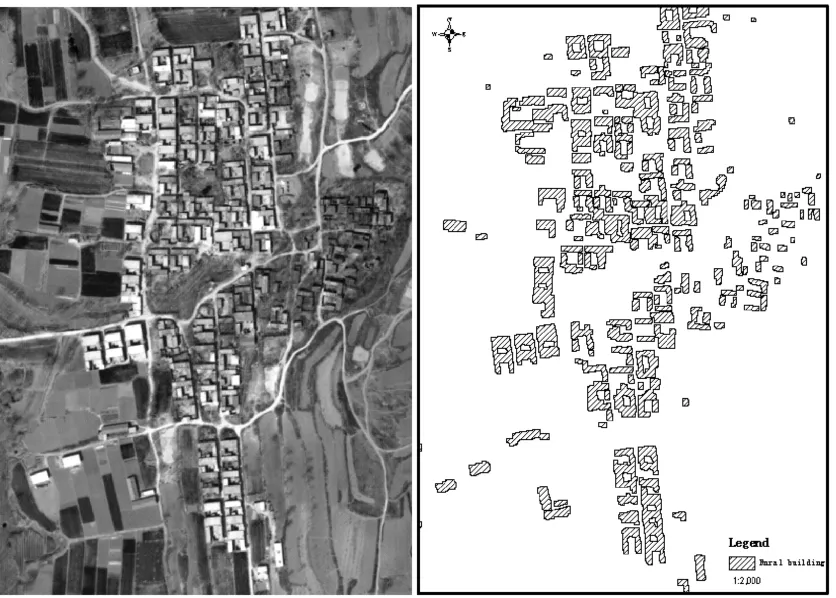
图2 试验区1的遥感影像与建筑物轮廓提取结果
试验共提取了234处农村居民建筑物,总面积为191 539 m2,并通过人工解译方法对提取结果进行了精度评价。其中,I类误差(建筑物被错分为其他地物)和II类误差(其他地物被错分为建筑物)分别为4.09%和3.25%,总体精度达到95.94%。
②城市建筑物提取
试验区2为城区居民地,占地面积0.19 km2,采用面向对象的城区建筑物提取处理步骤包括:基于区域合并的多尺度分割、基于高度阈值的建筑物初步提取、建筑物陡坡边缘地物重分类、基于绿度指数的植被信息去除和数学形态学处理[17],总体分类准确度达到了96.72%。
(2)道路要素提取
由于路网的复杂性,以及“同物异谱”和“异物同谱”现象的存在,仅依靠单一遥感数据或单一特征提取道路要素,难以满足地形图测绘的精度要求[10]。利用航空影像信息中地物的光谱、几何、上下文等特征进行协同提取,可以大大降低地物分类的不确定性,提高道路特征提取的准确度[11]。本文综合利用ALS60点云数据与航空影像,构建道路快速协同提取方法。
①自上而下的多尺度分割方法
乡村道路和高等级道路的形状特征和纹理特征差别较大,可采用多尺度算法进行大尺度分割。
②地物粗糙度特征
利用地面粗糙度可提高房屋、树木等地物的提取精度。由于DSM叠加在DEM上,因此DEM的起伏变化对粗糙度影响很小。地物的起伏越密集、高差越大,粗糙度也越大,可据此分离不同类型的地物。
③地物回波强度特征信息
地物的回波强度与多种因素有关,高反射率的介质表面较为光亮,低反射率的一般呈现黑暗表面。在提取的DEM中,沥青道路为低反射率的表面,而道路边界一般为绿化带、土地等高反射率的地物,其反射率有较大的差值。因此,可以先分析和标定地物回波强度,再根据标定的回波信息来提取道路。
3.水系网络要素提取
水系网络是地形图中的主要要素之一。DEM数据可用于水系网络信息的提取[18-19],方法主要有两种:一种是基于局部地形曲面几何分析的方法(如Puecker&Douglas算法),提取水系位置较为准确,但生成的水系网络不连续;另一种是基于坡面流物理模拟分析的方法(如D8算法),能够生成连续的水系网络,但在地形平坦的区域获取的汇水线效果较差,易产生错误的提取结果。
本文在对LiDAR提取DEM数据进行噪声平滑的基础上,利用基于局部地形曲面几何分析和基于坡面流物理模拟分析相结合的方法,建立了水系网络提取的技术流程[20](如图3所示)。
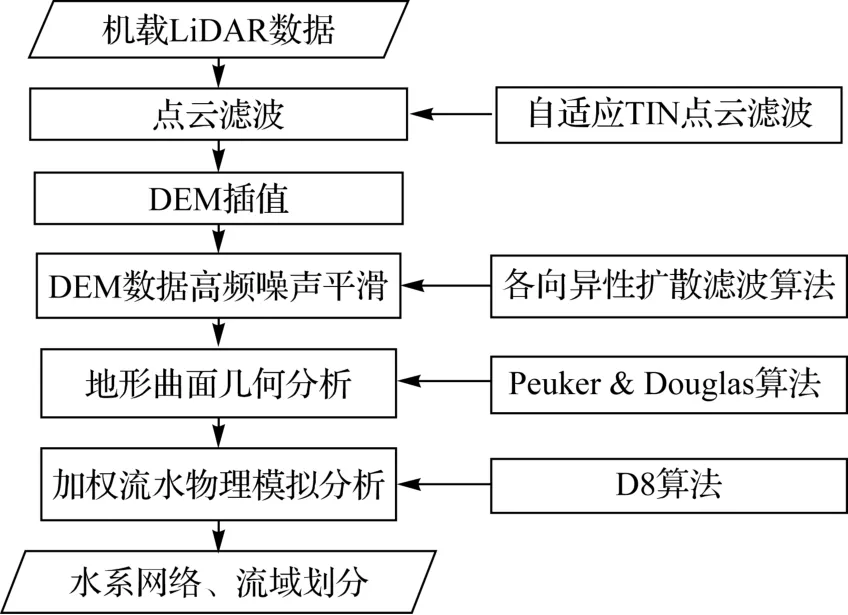
图3 基于LiDAR数据的水文信息提取技术流程
四、成果的规模化应用
本成果在国家1∶1000~1∶10 000地形图测绘和地理信息更新中发挥了作用,已广泛应用于交通、电力、城市规划、管线勘测等领域。北京、河南、浙江、内蒙、陕西等15个测绘地理信息生产单位,采用本成果关键技术在国家基础测绘工程中,完成了15 000 km2国家基础测绘任务,生产出大量的DLG、DEM和DOM等数字测绘地理信息产品,完成了超过2000 km以上的道路勘测任务,提高生产效率超过30%。
五、结束语
通过与河南省遥感测绘院产学研的长期合作,制定了机载LiDAR系统各个组成部分的高精度一体化检校技术规程,研发了基于面向对象的地物要素提取软件模型,并在国内进行了规模化生产应用。本文研究总结了机载LiDAR技术生产DEM、DOM和DLG产品,以及地物要素自动提取、建筑物三维建模等生产技术流程和作业规范,提供了系列比例尺基础测绘全新的作业模式。
[1] ALEXANDER B,CHRISTIAN H.Aspects of Generating Precise Digital Terrain Models in the Wadden Sea from LiDAR-water Classification and Structure Line Extraction [J].ISPRS Journal of Photogrammetry&Remote Sensing,2008,63(5):510-528.
[2] SHAN J,Toth C K.Topographic Laser Ranging and Scanning:Principles and Processing[M].Boca Raton:CRC Press,2008.
[3] MORIN K W.Calibration of Airborne Laser Scanners[D].Calgary:University of Calgary,2002.
[4] ZHANG X H.Precise Point Positioning Evaluation and Air-born LiDAR Calibration[R].Copenhagen:Danish National Space Center,2005.
[5] SKALOUD J,LICHTI D.Rigorous Approach to Boresight Self-calibration in Airborne Laser Scanning[J].ISPRS Journal of Photogrammetry and Remote Sensing,2006,61(1):47-59.
[6] 张靖,江万寿.基于虚拟连接点模型的机载LiDAR系统安置误差自检校[J].测绘学报,2011,40(6):762-769.
[7] 黄先锋,李卉,王潇,等.机载LiDAR数据滤波方法评述[J].测绘学报,2009,38(5):466-469.
[8] AXELSSONPE.DEM Generation from Laser Scanner Data Using Adaptive TIN Models[J].IAPRS,2000,33(B4/ 1):110-117.
[9] 程亮,龚健雅.LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法[J].测绘学报,2008,37(3):391-393.
[10] 李怡静,胡翔云,张剑清,等.影像与LiDAR数据信息融合复杂场景下的道路自动提取[J].测绘学报,2012,41(6):870-876.
[11] 李卉.集成LiDAR和遥感影像城市道路提取与三维建模[J].测绘学报,2011,40(1):40-41.
[12] AXELSSON P.DEM Generation from Laser Scanner Data Using Adaptive TIN Models[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B4/1):110-117.
[13] 钱伟新,刘瑞根,王婉丽,等.基于图像特征方向的各向异性扩散滤波方法[J].中国图象图形学报,2006,11(6):818-822.
[14] 王毅,张良培,李平湘.多光谱遥感图像的自适应各向异性扩散滤波[J].遥感学报,2005,9(6):660-666.
[15] HAALA N,KADA M.An Update on Automatic 3D Building Reconstruction[J].ISPRS Journal of Photogrammetry and Remote Sensing,2010,65(6):570-580.
[16] SAMPATH A,SHAN J.Building Boundary Tracing and Regularization from Airborne LiDAR Point Clouds[J]. PhotogrammetricEngineeringandRemoteSensing,2007,73(7):805-812.
[17] 胡伟,卢小平,李珵,等.基于改进RANSAC算法的屋顶激光点云面片分割方法[J].测绘通报,2012(11):31-34.
[18] LEE D,LEE K,LEE S.Fusion of LiDAR and Imagery for Reliable Building Extraction[J].Photogrammetric Engineering and Remote Sensing,2008,74(2):215-226.
[19] VU T,YAMAZAKI F,MATSUOKA M.Multi-scale Solution for Building Extraction from LiDAR and Image Data[J].International Journal of Applied Earth Observation and Geoinformation,2009,11(4):281-289.
[20] YU Haiyang,CHENG Gang,GE Xiaosan,et al.Object O-riented Land Cover Classification Using ALS and GeoEye Imagery over Mining Area[J].Transactions of Nonferrous Metals Society of China,2011,21(S3):733-737.
[21] 朱庆,田一翔,,张叶廷.从规则格网DEM自动提取汇水区域及其子区域的方法[J].测绘学报,2005,34(2):129-133.
[22] 张永军,吴磊,林文平,等.基于LiDAR数据和航空影像的水体自动提取[J].武汉大学学报:信息科学版,2010,35(8):936-940.
[23] 于海洋,卢小平,程钢,等.基于LiDAR数据的流域水系网络提取方法研究[J].地理与地理信息科学,2013,29(1):17-21.
Key Technologies of Airborne LiDAR and Its Applications in Basic Surveying and Mapping
LU Xiaoping,PANG Xingchen,WU Yongbin,LI Cheng,LI Guoqing,YU Haiyang
P237
B
0494-0911(2014)09-0026-05
2013-09-03
河南省高校科技创新团队支持计划(14IRTSTHN026);河南理工大学2013年度博士基金(B2013-018);2013年国家测绘科技计划(测科函[2013]31号)
卢小平(1962—),男,河南焦作人,博士,教授,研究领域为3S集成应用。
庞星晨引文格式:卢小平,庞星晨,武永斌,等.机载LiDAR基础测绘关键技术及应用[J].测绘通报,2014(9):26-30.
10.13474/j.cnki.11-2246. 2014.0286
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21 05:33:36
浙江国土资源(2019年10期)2019-10-31 03:17:00
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
建材发展导向(2019年10期)2019-08-24 06:25:28
测绘通报(2019年4期)2019-05-10 08:16:20
中国公共安全(2017年7期)2017-10-13 08:18:11
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
电子制作(2017年9期)2017-04-17 03:01:00
