自主式水下机器人故障特征增强方法
2014-06-23 13:52张铭钧刘维新殷宝吉王玉甲
哈尔滨工程大学学报 2014年9期
张铭钧,刘维新,殷宝吉,王玉甲
(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)
自主式水下机器人故障特征增强方法
张铭钧,刘维新,殷宝吉,王玉甲
(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)
针对小波方法对自主式水下机器人(AUV)纵向速度进行外部随机干扰抑制时存在的过抑制问题,提出一种AUV纵向速度信号故障特征增强与外部随机干扰抑制方法,采用自适应随机共振方法实现AUV纵向速度信号的随机共振,以达成外部随机干扰能量向故障信号能量的转移;针对AUV纵向速度信号的非周期特性,基于AUV纵向速度信号与周期信号驱动下双稳系统输出信号实验数据,分析AUV纵向速度信号驱动下布朗粒子运动状态。水池实验结果表明:所提方法相对小波方法故障信号特征增强效果为70.66%,避免了过抑制问题,且布朗粒子仅在负势阱内运动。
自主式水下机器人;外部干扰;特征增强;随机共振;小波;过抑制;非周期;布朗粒子
自主式水下机器人(autonomous underwater vehicle,AUV)无人无缆工作在复杂的海洋环境,海流等外部随机干扰会使AUV传感器信号偏离真实状态,而推进器故障信息可能隐藏在这些被干扰的传感器信号中,为降低外部随机干扰对推进器故障诊断的影响,需要对传感器信号进行处理以实现对外部随机干扰的抑制[1]。
小波分析、灰色预测和卡尔曼滤波器等方法[2-4]是对传感器信号进行处理的典型方法,在对周期性信号进行外部随机干扰抑制方面有较好的效果。但在研究AUV故障模式下状态信号中所含的外部随机干扰抑制问题时发现,外部随机干扰与故障信号耦合在一起难以剥离,抑制阈值只能估计得出且固定不变,当作为故障信号特征的小波系数值低于阈值时该处小波系数被置零,当小波系数值高于阈值时需用该小波系数值减去阈值,目的是将外部随机干扰从原信号中剥离,这2种情况都会使故障信号特征被当成外部随机干扰而被削弱进而形成过抑制。并且,虽然小波分析和经验模式分解等故障信号特征增强方法在滚动轴承故障诊断与故障信号特征增强问题上取得了良好的效果[5-6],但由于AUV纵向速度信号不具有滚动轴承振动信号所具有的周期性,所以难以应用上述方法增强AUV纵向速度信号故障特征。
随机共振具有利用外部随机干扰对信号特征进行增强的独特优势[7],基于随机共振原理来增强故障特征、抑制外部随机干扰,以规避传统方法存在的过抑制问题;通过实验数据分析,以期得到AUV纵向速度信号驱动下布朗粒子运动状态。通过AUV实验样机水池实验验证所提方法的有效性,并与小波方法的效果进行比较分析。
1 AUV纵向速度故障特征增强方法
基于小波方法对AUV外部随机干扰进行抑制时,通过各层细节系数估计该层抑制阈值的大小,高于抑制阈值的该层细节系数被认为是信号的真实特征得以保留,低于抑制阈值的该层细节系数被认为是外扰而被置零[8]。在对推进器故障状态下AUV纵向速度信号进行外部随机干扰抑制的研究过程中发现:对于AUV纵向速度信号而言,时变的外部随机干扰与故障信号耦合在一起难以剥离,使得AUV所受海流等外部随机干扰的强度难以估计。在非故障特征处基于小波方法进行外部随机干扰抑制的处理方法相当于将外部随机干扰从原信号中剥离出去,是具有积极意义的,但在信号故障特征处这种处理方式会造成过抑制。
针对上述问题,提出一种AUV纵向速度信号故障特征增强与外部随机干扰抑制方法,与传统基于小波分析的阈值处理方法剥离、消除外部随机干扰的技术路线不同,方法将AUV纵向速度信号作为双稳随机共振系统的驱动力,通过改变双稳系统势垒高度达成AUV纵向速度信号的随机共振,将外部随机干扰信号能量向故障信号转移,以实现增强信号故障特征的同时抑制外部随机干扰,以避免过抑制的目的。
1.1 AUV纵向速度信号自适应随机共振调整方法
1.1.1 自适应随机共振调整策略的确定
实现周期信号随机共振时,一般通过向原信号添加噪声的方式,调节噪声强度至最佳噪声强度区间诱发随机共振[9]。在研究AUV纵向速度信号随机共振调整时发现:AUV推进器出力不足故障使得实际速度在短时间内无法跟踪上期望速度,在AUV纵向速度信号时域波形中产生短暂的下降沿和上升沿,而原本就无法从原始信号中完全剥离的外部随机干扰受上述下降沿和上升沿的影响,更加难以准确估计其强度,以至无法确定能够发生随机共振的最佳噪声强度区间;同时又由于与水面航行器相比AUV航速较低,当海流等外部随机干扰强度相对纵向期望速度较高时,添加噪声的随机共振调整方法难以实现AUV状态信号随机共振。
基于随机共振理论[9]与AUV所受外部随机干扰的特点进一步分析认为:由于结构参数调整方法通过改变势垒高度,将AUV纵向速度信号中所含外部随机干扰信号能量在势阱内进行重新分配,相当于将随机共振的实现问题从考虑原信号信噪比的角度转移到寻找最佳结构参数组合的角度,更适于实现外部随机干扰强度未知的故障模式下AUV纵向速度信号的自适应随机共振,因此,确定基于结构参数调整实现AUV纵向速度信号随机共振的自适应随机共振调整策略。
由于双稳随机共振系统具有2个结构参数,存在同时调节2个结构参数和固定一个结构参数调节另一个结构参数2种适用的调整策略,为探讨哪种调整策略更适合AUV纵向速度随机共振调整,结合势垒高度公式和电势差公式[10]进行分析:

式中:△U为双稳系统势垒高度,△x为双稳系统电势差,a、b均为结构参数。
由式(1)可以看出,当势垒高度由△U增大为k△U时,既存在的组合,也存在a'=a,b'=b/k等多种组合,即同一势垒高度△U对应多种结构参数组合。由式(2)可以看出,当取a'=时,电势差变为,当取a'=a,b'=b/k时,电势差变为,即不同的结构参数组合又对应不同的电势差。通过上述分析可以看出,同时调整2个结构参数会存在多种解,为便于实现在线调整,选择固定一个结构参数调整另一个结构参数的调整策略。
1.1.2 结构参数对自适应随机共振效果的影响
结构参数a、b对随机共振效果的影响并不相同,为确定AUV纵向速度信号自适应随机共振调整过程中应调整哪一个结构参数,针对AUV纵向速度信号所受外部随机干扰的特点分析结构参数对AUV纵向速度信号随机共振效果的不同影响,具体分析过程如下。
基于结构参数调整实现随机共振主要有2种可供选择的调整方式[9]:1)固定a值,预估b值,按固定步长减小b;2)固定b值,从0开始按固定步长逐渐增大a。在研究AUV纵向速度信号随机共振的过程中发现:采取固定结构参数a减小结构参数b的调整方式,需基于外部随机干扰强度估计b值范围,由于AUV纵向速度信号故障特征与外部随机干扰耦合在一起难以剥离,使得外部随机干扰强度难以估计,因此,该调整方式难以适用;采用固定结构参数b、调节结构参数a的方式,可以从0开始按固定调节步长逐渐增大a值,直至AUV纵向速度信号发生随机共振,无需根据外部随机干扰强度预判a的取值范围,更适于实现AUV纵向速度信号随机共振。
进一步分析认为:由于势垒高度决定了布朗粒子能否发生跃迁运动[9],因此在不外加噪声的前提下,势垒高度是影响AUV纵向速度信号随机共振发生的最重要因素;从式(1)可以看出,式中2阶的结构参数a对△U的影响要高于1阶的结构参数b。
由上述分析得出:结构参数a是影响AUV纵向速度信号随机共振的最重要因素。因此,确定的自适应随机共振调整方法为:固定结构参数b,按固定调节步长调整结构参数a,根据式(1)中a与b的相对关系参考文献[10],取b=1。
1.2 调节步长对自适应随机共振效果的影响
调节步长λ直接影响被研究对象随机共振效果,实现周期信号随机共振时需根据被研究对象的特点、调节步长λ对信噪比评价指标的影响来确定λ值[10],AUV纵向速度信号没有特征频率,难以应用评价周期信号随机共振效果的信噪比评价指标,需根据AUV纵向速度信号的特点研究其随机共振评价指标问题,并结合调节步长λ对AUV纵向速度信号随机共振效果的影响确定调节步长λ。
1.2.1 非周期随机共振评价指标的确定
由于AUV纵向速度信号经快速傅里叶分解后表现出非周期特性,因此传统周期信号随机共振的信噪比评价指标在这里无法应用。根据AUV纵向速度信号的非周期特性,利用双稳系统输出信号与AUV纵向速度信号之间的互相关系数作为评价指标,这是因为互相关系数可以衡量输入信号波形与输出信号波形结构的一致性,这种一致性体现了双稳系统输出信号对原始信号的还原程度,所以互相关系数可以用作非周期信号随机共振的评价指标[11]。
通过自适应随机共振调整过程中互相关系数的局部极大值现象,判断随机共振是否发生[12],互相关系数R由下式求得[11]:

式中:s为AUV纵向速度原始信号,x为双稳系统输出信号,,N为AUV纵向速度信号数据长度。
1.2.2 调节步长对评价指标和调节时间的影响
调节步长对AUV纵向速度信号随机共振效果的影响主要体现在评价指标和调节时间两个方面。因此,根据1.1节分析并确定的自适应随机共振调整方法,得到不同调节步长对应的评价指标和调节时间如表1所示。
表1中,λ为所采用的调节步长,R为按该调节步长进行自适应随机共振调节所获得的评价指标的局部极大值,a为取得该评价指标局部极大值时所对应的结构参数a的值,t为算法达到评价指标最大值所需的调节时间。由于每次仿真得到的调节时间虽然相差不大但并不完全一致,因此表1中调节时间为经50次仿真后平均所得。

表1 λ变化对R和t的影响Table 1 The influence of the variation of λ on R and t
分析表1:调节步长λ为0.5和0.7时对应评价指标R=0.751、结构参数a=3.5,调节步长λ取其他值时对应评价指标R=0.751 3、结构参数a=3.6,即λ为0.5和0.7时对应的评价指标相对小。
从调整时间角度分析,调节时间直接影响上述自适应随机共振调整方法占用AUV主控内存资源的时间。从表1可以看出:调节时间t随着调节步长λ增大而减小,调节步长取最大时,评价指标R减小,因此,选取调节步长 λ=0.6,对应的评价指标 R=0.751 3,结构参数a=3.6,调节时间t=6.01。
2 布朗粒子运动状态分析
布朗粒子运动状态是研究随机共振的基础,周期信号随机共振的机理就是基于布朗粒子在双势阱之间的跃迁运动分析得出的[12],在研究AUV纵向速度信号随机共振的过程中发现:非周期的AUV纵向速度信号与周期信号驱动下双稳系统输出信号的幅值区间和信号波形有显著区别,由于双稳系统的输出信号代表着布朗粒子阱内运动的轨迹[12],因此,AUV纵向速度信号与周期信号驱动下布朗粒子运动状态并不相同,周期信号随机共振理论中的双势阱跃迁理论难以适用于AUV纵向速度信号随机共振。
2.1 AUV纵向速度信号驱动下双稳系统输出信号

图1 50%故障模式原始数据与双稳系统输出Fig.1 The original data and output of bistable system with 50%thruster fault,respectively
为分析AUV纵向速度信号驱动下与周期信号驱动下双稳系统输出信号的区别,需获取AUV纵向速度信号驱动下双稳系统输出信号。前文基于给出的AUV纵向速度信号自适应随机共振调整方法,对AUV实验样机水池实验获取的出力不足故障模式下状态信号进行自适应随机共振调整。AUV目标速度为0.3 m/s,目标角度为0°,故障模拟方式按文献[14]的软件模拟方式,从第150个节拍开始到结束,模拟右主推进器50%出力不足故障(推进器实际出力是理论出力的50%),原始数据和双稳系统的输出信号如图1所示。输出信号幅值区间变化。图1中,50%出力不足故障模式下AUV纵向速度信号原始数据幅值区间为[0.209 0,0.356 0],双稳系统输出信号幅值区间为[-1.908 1,-1.891 0],发生随机共振后双稳系统输出信号幅值区间缩小为原始数据幅值区间的11.63%。并且,在研究60%、75%等出力不足故障模式下的纵向速度信号的随机共振时,同样存在幅值区间压缩这一现象,只是具体数据不同。根据随机共振原理可知:周期信号驱动下的布朗粒子会产生跃迁运动,从一个势阱运动到另一个势阱中,在两势阱间电势差的作用下导致双稳系统输出信号与原信号相比幅值区间被放大[10]。因此,从实验数据可以发现:幅值区间压缩现象是AUV纵向速度信号随机共振与周期信号随机共振的区别之一。
分析图1中的原始信号与双稳系统输出信号的变化趋势。在闭环控制器作用下,图1中纵向速度为围绕控制期望v=0.3 m/s波动;对应图1中的双稳系统输出信号选取的是发生随机共振时的输出,实验中得到此时对应的评价指标为0.863 9。由于确定的评价指标为互相关系数,而互相关系数评价的是输入信号波形与输出信号波形结构的一致性,其取值范围为[-1,1],当高于0.8时说明输入信号波形与输出信号波形高度相关,两者结构相近且变化趋势基本相同[11],因此可以判断图1中双稳系统输出信号与原始信号的变化趋势应基本相同,变化趋势为围绕某定值波动。结合图1中曲线并根据双稳系统稳态点值计算公式[12]可知,该定值为双稳系统稳态点值 ±a/b=±1.897 4中的负稳态值。而周期信号驱动下双稳系统输出信号,其幅值不仅能取到双稳系统的负稳态值,同样也能取到正稳态值。因此,从实验数据可以发现:围绕双稳系统的负稳态值波动是AUV纵向速度信号随机共振与周期信号随机共振的区别之二。
2.2 基于实验数据的布朗粒子运动状态分析
由于 AUV纵向速度信号的非周期性,使得AUV纵向速度信号驱动下布朗粒子运动状态与周期信号驱动下有显著不同,周期信号驱动下布朗粒子的双势阱跃迁运动难以适用于AUV纵向速度信号随机共振。基于AUV纵向速度信号驱动下与周期信号驱动下双稳系统输出信号的区别分析布朗粒子运动状态,为研究AUV纵向速度信号随机共振问题提供理论依据。
双稳系统输出信号实际上描述的是布朗粒子在双稳随机共振系统势阱内的变化轨迹[12],为描述布朗粒子在双稳随机共振系统内的运动状态,分析布朗粒子的运动范围,需给出对应的势函数图。基于所提自适应随机共振调整方法实现50%出力不足故障模式下AUV纵向速度信号的随机共振,得到评价指标的局部极大值对应的结构参数组合为a=3.6,b=1,双稳系统势函数为

式中:U为双稳系统势函数,a、b为双稳系统结构参数,x为横坐标位置。
对应的双稳随机共振系统势函数如图2所示。

图2 双稳随机共振系统势函数Fig.2 Potential function of bistable stochastic resonance
结合图2中的双稳随机共振系统势函数分析AUV纵向速度信号与周期信号驱动下布朗粒子运动状态的不同之处。由随机共振理论可知:双稳系统电势差影响着双稳系统输出信号幅值放大程度[9],但这是以布朗粒子发生跃迁运动为基础,而由2.1节实验观察到:幅值区间压缩是AUV纵向速度信号随机共振与周期信号随机共振的区别之一,因此,基于幅值区间压缩而不是放大这一现象分析认为:AUV纵向速度信号未能驱动布朗粒子作跃迁运动。
由于双稳系统存在2个势阱,需确定布朗粒子的运动在哪一个势阱内。2.1节实验中观察到:AUV纵向速度信号驱动下双稳系统输出信号值围绕双稳系统的负稳态值波动,因为双稳系统的输出代表着布朗粒子阱内运动的轨迹[12],基于这一现象分析认为:AUV纵向速度信号驱动下布朗粒子运动在负稳态势阱中。
综上所述,基于实验数据分析认为:与周期信号驱动下布朗粒子的双阱跃迁运动状态不同,推进器出力不足故障模式下(包括50%、60%和75%出力不足故障)AUV纵向速度信号驱动的布朗粒子,并未发生双阱跃迁运动,仅在负稳态势阱内运动,发生的是单阱非周期随机共振。
3 水池实验验证
3.1 自适应随机共振调整效果实验验证
为验证提出的自适应随机共振调整方法的有效性,通过“海狸I”号AUV实验样机[13]进行水池实验验证。通过“海狸I”主推进器敞水实验,获得实验平台作前向运动时,主推进器推力与控制电压的关系为[14]

式中:V为控制电压,τ为推进器推力。当分别模拟推进器实际输出推力τ′为正常推力的75%和50%时,即τ′=0.75τ和τ′=0.5τ时,实际送给推进器电机驱动器的控制电压V′分别为

AUV目标速度为0.3 m/s,目标角度为0°,从第150个节拍开始到结束分别软件模拟右主推进器50%和75%出力不足故障,故障程度和发生时刻均为事先设定,水池未造流。数据的时间滑动窗大小经多次试验选取为350拍,采样周期为f=5 Hz,即方法诊断周期为(350/f)=70 s。“海狸I”纵向速度信号作为双稳随机共振系统的输入,进行自适应随机共振调整,评价指标R随结构参数a变化的关系如图3所示。

图3 3种模式下a与R对应关系Fig.3 Relationship between a and R in the three modes
所提自适应调整方法是以实现AUV纵向速度信号随机共振为目的,根据随机共振理论可知,评价指标出现局部极大值即可以说明发生了随机共振现象[12]。分析图3,2种故障模式及正常模式下,AUV纵向速度信号均在a=3.6处出现了评价指标局部极大值,说明AUV纵向速度信号发生随机共振,表明所提方法对AUV正常模式、右主推50%及75%出力不足故障模式下纵向速度信号随机共振调整的有效性。
3.2 故障特征增强与外部随机干扰抑制效果验证
为验证基于随机共振原理的AUV纵向速度信号故障特征增强与外部随机干扰抑制方法的有效性,将水池实验获取的50%出力不足故障模式下AUV纵向速度原始数据作为双稳随机共振系统的驱动力,基于所提AUV纵向速度信号故障特征增强与外部随机干扰抑制方法进行调整,当评价指标出现局部极大值时,取此时的双稳系统输出分别与小波处理后信号和原始信号进行对比。
为验证该方法的有效性,基于多层小波分析方法进行故障信号特征提取,具体做法为:基于“db4”小波基函数进行四层离散小波分析[2],并以第4层小波分析获得的细节系数的模极大值点作为信号的故障特征[8]。为便于观察模极大值点所处位置,对所得小波系数取绝对值。由于探讨的重点在于随机共振理论对外部随机干扰的抑制与故障信号特征的增强,因此由非对称小波基函数“db4”引起的时序列漂移不做讨论。50%出力不足故障模式下AUV纵向速度信号特征提取结果如图4所示。

图4 50%故障模式下故障特征提取结果Fig.4 Results of extracted fault feature for 50%thruster fault
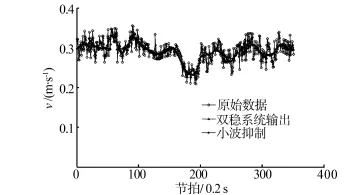
图5 50%故障模式下外部随机干扰抑制效果对比Fig.5 Comparison results of the external stochastic disturbance for 50%thruster fault
由2.1节的实验结果表明:与原始信号相比,双稳系统输出信号幅值区间被压缩,因此难以与传统方法进行定量比较。由于归一化不改变信号的细节特征与变化趋势,为便于与原始信号进行比较分析,将双稳系统输出信号与原始数据进行了归一化处理。双稳系统输出信号与原始信号、小波分析抑制后信号的对比如图5所示。
由图4可见,50%出力不足故障模式下纵向速度信号特征值所处位置为小波分析的模极大值x=14处,经所提方法进行信号特征增强后,故障特征相对于原始信号增强3.56%(小波系数幅值由y=0.049 67增大到y=0.051 44);小波方法进行外部随机干扰抑制后,故障信号特征被抑制为原始信号的32.90%(小波系数幅值由 y=0.049 67削弱为0.016 34),表明在故障信号特征处造成了过抑制。方法相对小波方法,故障信号特征增强效果为3.56%+(1-32.90%)=70.66%。
由图5可见,原始信号、方法、小波方法信号幅值区间分别为[0.209 0,0.356 0]、[0.221 0,0.346 6]和[0.232 0,0.340 5]。方法抑制后信号幅值区间为原信号的85.4%,而小波方法为73.8%,方法相对小波方法,对原始信号抑制程度低11.6%。
综合上述分析,方法对外部随机干扰抑制效果为原始信号的85.40%,小波方法为原始信号的73.8%,方法比小波方法低11.6%;方法对故障特征增强效果在原始信号基础上增强3.56%,小波方法故障特征没有增强反而被抑制为原始信号的32.90%,方法比小波方法高70.66%。
对AUV外部干扰抑制和故障特征增强的目的都是为了提高其故障诊断的准确性,同时分析外部干扰抑制和故障特征增强效果,小波方法在较好地抑制外部干扰的同时却大幅度削弱了故障特征,方法抑制外部干扰效果稍低于小波方法,但故障特征增强效果显著。在AUV故障诊断中,可以依据方法进行故障特征增强,依据小波方法进行外部干扰抑制,以进一步提高故障诊断的准确性。
4 结论
基于随机共振理论对AUV纵向速度信号的故障特征增强与外部随机干扰抑制问题进行了研究,给出了实现AUV纵向速度信号随机共振的自适应调整方法,通过水池实验结果和基于实验数据的布朗粒子运动状态分析,得出以下结论:
1)与传统基于小波分解的外部干扰抑制方法相比,所提方法可有效避免过抑制问题,故障特征增强了70.66%,效果较为明显,同时也对外部随机干扰进行了抑制,但抑制效果稍低于小波方法。
2)与周期信号驱动下的布朗粒子运动状态不同,AUV纵向速度信号驱动下的布朗粒子仅在负稳态势阱中进行运动,发生的随机共振不属于双阱随机共振现象,而是单阱非周期随机共振,该分析结果为研究AUV纵向速度信号随机共振问题提供参考和借鉴。
[1]朱大奇,胡震.水下机器人故障诊断与容错控制技术[M].北京:国防工业出版社,2012:87-88.
[2]王丽荣,徐玉如.水下机器人传感器故障诊断[J].机器人,2006,28(1):25-29.
WANG Lirong,XU Yuru.Sensor fault diagnosis of autonomous underwater vehicle[J].Robot,2006,28(1):25-29.
[3]周媛,朱大奇.水下机器人传感器故障诊断的灰色预测模型[J].中国造船,2011,52(1):137-144.
ZHOU Yuan,ZHU Daqi.A sensor fault diagnosis method for underwater vehicles based on GM(1,1)[J].Shipbuilding of China,2011,52(1):137-144.
[4]李晔,苏玉民,庞永杰,等.自适应卡尔曼滤波技术在水下机器人运动控制中的应用[J].中国造船,2006,47(4):83-88.
LI Ye,SU Yumin,PANG Yongjie,et al.Application of adaptive Kalman filter in underwater vehicle motion control[J].Shipbuilding of China,2006,47(4):83-88.
[5]李宏坤,赵长生,周帅,等.基于小波包-坐标变换的滚动轴承故障特征增强方法[J].机械工程学报,2011,47(19):74-80.
LI Hongkun,ZHAO Changsheng,ZHOU Shuai,et al.Fault feature enhancement method for rolling bearing based on wavelet packet-coordinate transformation[J].Journal of Mechanical Engineering,2011,47(19):74-80.
[6]穆岩,侯恕萍,迟冬南.基于小波HMM的UUV传感器数据孤立点检测[J].智能系统学报,2013,8(6):551-557.
MU Yan,HOU Shuping,CHI Dongnan.UUV sensor data outlier detection on the basis of wavelet HMM[J].CAAI Transactions on Intelligent Systems,2013,8(6):551-557.
[7]BENZI R,SUTERA A,VULPIANI A.The mechanism of stochastic resonance[J].Journal of Physics A:Mathematical and General,1981,14:453-457.
[8]吴娟.自主式水下机器人多故障诊断方法研究[D].哈尔滨:哈尔滨工程大学,2011:52-55.
WU Juan.Research on multi faults for autonomous underwater vehicle[D].Harbin:Harbin Engineering University,2011:52-55.
[9]冷永刚,王太勇,郭焱,等.双稳随机共振参数特性的研究[J].物理学报,2007,56(1):30-35.
LENG Yonggang,WANG Taiyong,GUO Yan,et al.Study of the property of the parameters of bistable stochastic resonance[J].Acta Physica Sinica,2007,56(1):30-35.
[10]雷亚国,韩冬,何正嘉,等.自适应随机共振新方法及其在故障诊断中的应用[J].机械工程学报,2012,48(7):62-67.
LEI Yaguo,HAN Dong,HE Zhengjia,et al.New adaptive stochastic resonance method and its application to fault diagnosis[J].Journal of Mechanical Engineering,2012,48(7):62-67.
[11]COLLINS J,CHOW C C,IMHOFF T T.Aperiodic stochastic resonance in excitable systems[J].Physical Review E,1995,52(4):3321-3324.
[12]胡岗.随机力与非线性系统[M].上海:上海科技教育出版社,1994:220-239.
[13]徐建安,王玉甲,张铭钧.自主式水下机器人试验平台研制与实验研究[J].哈尔滨工程大学学报,2007,28(2):212-217.
XU Jianan,WANG Yujia,ZHANG Mingjun.Development and experiment of an autonomous underwater vehicle testbed[J].Journal of Harbin Engineering University,2007,28(2):212-217.
[14]王玉甲.水下机器人智能状态监测系统研究[D].哈尔滨,哈尔滨工程大学,2006:92-97.
WANG Yujia.Research on intelligent condition monitoring system for autonomous underwater vehicle[D].Harbin:Harbin Engineering University,2006:92-97.
Fault feature enhancement for autonomous underwater vehicles
ZHANG Mingjun,LIU Weixin,YIN Baoji,WANG Yujia
(College of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin 150001,China)
With respect to over-attenuation caused by wavelet decomposition,when attenuating the external stochastic disturbance for longitude velocity of autonomous underwater vehicle(AUV),a novel algorithm was proposed to enhance fault feature and attenuate stochastic disturbance for AUV longitude velocity.The stochastic resonance of longitude velocity was obtained based on adaptive stochastic resonance,thereby transmitting the energy of external disturbance to that of fault signal.Based on experiment data from outputs of bistable system driven by the non-periodic longitude velocity signal and periodic signal,respectively,the motion state of Brownian particle driven by the longitude velocity was analyzed.The pool experiment results showed that in comparison with wavelet method,the enhancement of fault feature was improved by 70.66%without over-attenuation based on the proposed method,the Brownian particle just moved in negative potential well.
autonomous underwater vehicle;external disturbance;feature enhancement;stochastic resonance;wavelet;over-attenuation;non-periodic;Brownian particle
10.3969/j.issn.1006-7043.201403036
TP27
A
1006-7043(2014)09-1099-07
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201403036.html
2013-03-14. 网络出版时间:2014-08-26.
国家自然科学基金资助项目(51279040);高等学校博士点基金资助项目(20112304110024).
张铭钧(1963-),男,教授,博士生导师.
张铭钧,E-mail:zhangmingjun@hrbeu.edu.cn.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
装备制造技术(2020年4期)2020-12-25
知识经济·中国直销(2018年12期)2018-12-29
测控技术(2018年10期)2018-11-25
当代陕西(2018年12期)2018-08-04
浙江工业大学学报(2017年5期)2018-01-22
河北科技大学学报(2015年5期)2015-03-11
中国卫生(2014年9期)2014-11-12
电测与仪表(2014年2期)2014-04-04