
用于检测三维力的柔性触觉传感器结构研究及有限元分析
2014-06-07 10:02:40刘彩霞蔡文婷袁海涛曹广辉
计量学报 2014年5期
刘彩霞, 黄 英, 缪 伟, 蔡文婷, 袁海涛, 曹广辉
(合肥工业大学电子科学与应用物理学院,合肥安徽 230009)
用于检测三维力的柔性触觉传感器结构研究及有限元分析
刘彩霞, 黄 英, 缪 伟, 蔡文婷, 袁海涛, 曹广辉
(合肥工业大学电子科学与应用物理学院,合肥安徽 230009)
基于力敏导电橡胶材料,设计了一种四电极对称结构的三维力柔性触觉传感器。利用有限元分析软件ANSYS,结合橡胶材料的Mooney-Rivlin本构模型,对传感器加载垂直力和剪切力进行有限元分析,得到传感器在三维力作用下的应力应变分布状态,并进行了实验验证,结果表明了传感器结构设计和数学模型构建的合理性。通过对传感器传力的触头材料和形状进行有限元分析,表明触头选择硬度相对较大的材料,制成长椭球状半径(a=1.5b),可以优化传感器的性能,为用于检测三维力的柔性触觉传感器的实际应用提供了依据。
计量学;触觉传感器;三维力;力敏导电橡胶;有限元
1 引 言
触觉传感器是实现测量自身敏感面与外界物体相互作用参数的装置。在目前的触觉传感器中,单维力传感器的技术已经较成熟,实现剪切力及三维力信息检测的研究工作也取得了一定进展[1~8]。随着智能机器人等技术的发展,越来越多的应用场合需要既能检测三维力又具有柔性的新型触觉传感器。然而,受现有的材料科学、制造加工技术、工艺等限制,具有三维力检测功能的触觉传感器结构和敏感材料的柔性化的兼容方面还存在一定的困难,使三维力触觉传感器在智能机器人等领域的实际应用受到一定的限制。开发和研制既具有类似于皮肤弹性、柔性又可检测三维力的触觉传感器成为人们关注的热点。本文为实现传感器的柔性,选择既具有天然橡胶的机械柔性,同时又具有压敏特性的新型力敏导电橡胶为敏感材料,利用力敏导电橡胶的表面电阻效应设计出一种四电极对称结构的用于检测三维力的柔性触觉传感器。针对力敏导电橡胶的材料的双重非线性,采用橡胶材料的Mooney-Rivlin本构模型对三维力传感器单元结构进行有限元分析[9,10],并利用实验来验证传感器数学模型和结构的合理性。通过对传感器传力部件的触头材料特性和几何形状的有限元分析,优化了传感器的性能,为用于检测三维力的柔性触觉传感器的实际应用提供了依据。
2 三维力传感器
2.1 力敏导电橡胶
力敏导电橡胶是在绝缘的高分子材料中均匀加入导电粒子,如金属颗粒、导电离子、碳黑等[11]。它除了具备一般的导电橡胶特点外,还具有良好的力学性能。当力敏导电橡胶与电极接触时,接触面状况会随着接触力的增大而改变,随着接触力的增大,接触表面接触程度变好,导电通路增多,界面接触电阻与接触力有如下关系[12,13]:

式中:ρ为接触表面的电阻率,P为接触压力,K为接触面材料的硬度和弹性的函数。
2.2 传感器结构
传感器模型主要由硬质传力触头、力敏导电橡胶和柔性电极3部分组成,如图1(a)。
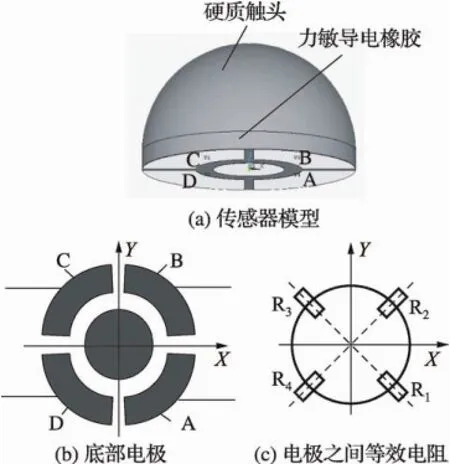
图1 传感器单元结构
传感器触头可为半球或者椭球形状,由质地较硬的树脂橡胶材料制成,作为力传递元件,由它引起力敏导电橡胶的形变。其下是力敏导电橡胶,它既是敏感单元又是直接感受形变的弹性体。力敏导电橡胶的下面为柔性电路板,在柔性电路板上制作4个扇形和一个中心圆形电极,其结构如图1(b),将力敏导电橡胶用导电胶粘贴在柔性电路板上,由于与力敏导电橡胶的接触,公共电极O与4个扇形面状电极区域A、B、C、D之间形成导电通路,设公共电极O与4个扇形电极区域A、B、C、D之间电阻值分别为R1,R2,R3,R4,力敏导电橡胶与柔性电路板所形成的接触电阻等效电路如图1(c)。通过在柔性电极上制作引线,可测得电阻R1~R4的阻值。
2.3 三维力数学模型
假设ΔRX、ΔRY、ΔRZ分别为由X、Y、Z方向力引起的电阻变化,当一个三维力作用在传感器触头上时,将三维力F=F(FX,FY,FZ)的作用分解成3个独立分量逐个分析:当F=F(0,0,FZ),即仅有Z正方向压力时,A、B、C、D等4个电极区域所受的接触压力相同,R1~R4的阻值均减小ΔRZ;当F=F(FX,0,0),即仅有X正方向水平力时,由于力敏导电橡胶底部与电极固定,且厚度较小,受力时产生的横向位移相对于力敏导电橡胶的半径可以忽略,即橡胶层的应变仅为橡胶层不同部位的压缩和拉伸。FX产生一个绕Y轴的旋转力矩,使A、B区域橡胶层受到压缩,电阻R1、R2减小ΔRX,C、D区域橡胶层均受到拉伸,R3、R4增加ΔRX;当F=F(0,FY,0),由于对称性,B、C区域力敏橡胶层受到压缩,电阻R2、R3减小ΔRY,A、D区域力敏橡胶层均受到拉伸,电阻R1、R4增大ΔRY。
由文献[14]可得Fi(i=X,Y,Z)与R1~R4的关系式,用矩阵表示为
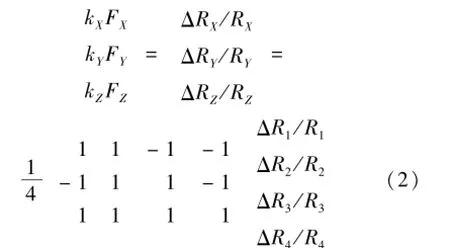
式中,kX,kY,kZ分别为三维力传感器对FX,FY,FZ的电阻系数。分析可知,当对传感器施加不同方向作用力时,力敏导电橡胶层与电极之间接触压力发生变化从而导致接触电阻R1~R4发生变化,由于R1~R4对3个方向力的灵敏度不同,因此可以根据R1~R4的变化信息来确定三维力的大小和方向。把力的3个独立分量相加,重新还原为三维力。
3 传感器有限元模型仿真
3.1 传感器模型建立
针对传感器实际结构,在有限元分析软件(ANSYS)里建立模型。传感器的硬质触头和力敏橡胶层这两部分在材料和结构特性上有很大不同,分别采用不同的单元类型来描述2种材料。对于力敏橡胶层,选用8节点Hyper58超弹性单元,其适用于3D实体超弹性结构建模,主要应用于模拟具有超弹性和大应变的橡胶类材料,计算采用Mooney-Rivlin 2参数模型;触头部分为硬质材料,选用8节点Solid45单元,适用于三维实体建模该单元有8个节点定义,每个节点具有X、Y、Z这3个方向上的自由度。模型具体参数,尺寸如表1。

表1 模型计算参数
通过对模型划分网格,将实体模型转化为有限元模型,橡胶材料具有非线性和大变形效应,在有限元分析中,必须开启大变形选项,以保证单元形状的质量,避免畸形单元。
为得到精确的求解结果,将应变较大的力敏橡胶层区域网格细化,圆球触头部分采取自由网格划分的方法,自动产生六面体和四面体单元,力敏导电橡胶层采用映射网格的方法,将力敏橡胶层划分为由六面体组成的有限元模型。分别控制触头和力敏导电橡胶层的单元密度,得到有限元模型如图2。

图2 有限元模型图
3.2 力敏导电橡胶层形变及接触力分析
根据传感器的约束与受力的实际情况,在传感器模型底部施加自由度为0的约束。触头顶部部分施加作用力载荷。传感器受不同加载力时的变形如图3。
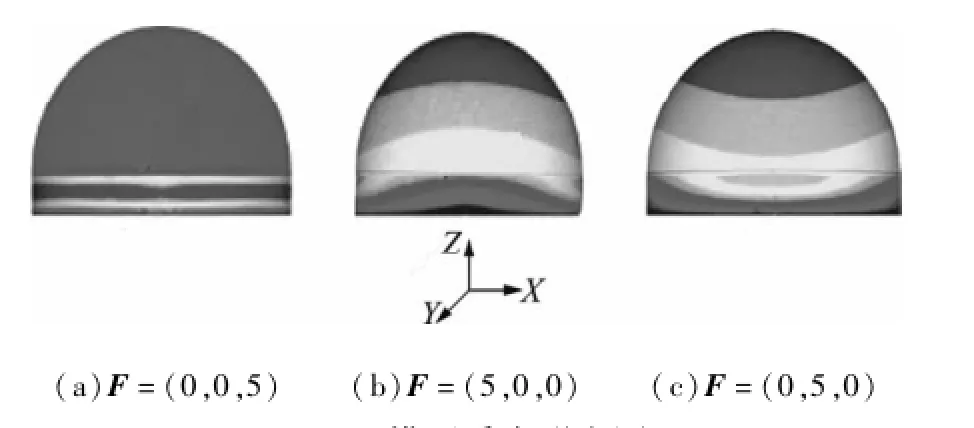
图3 模型受力形变图
由于接触电阻与A、B、C、D区域的接触压力有关,提取A、B、C、D等4个电极区域在受到不同三维力作用下的接触力如图4。
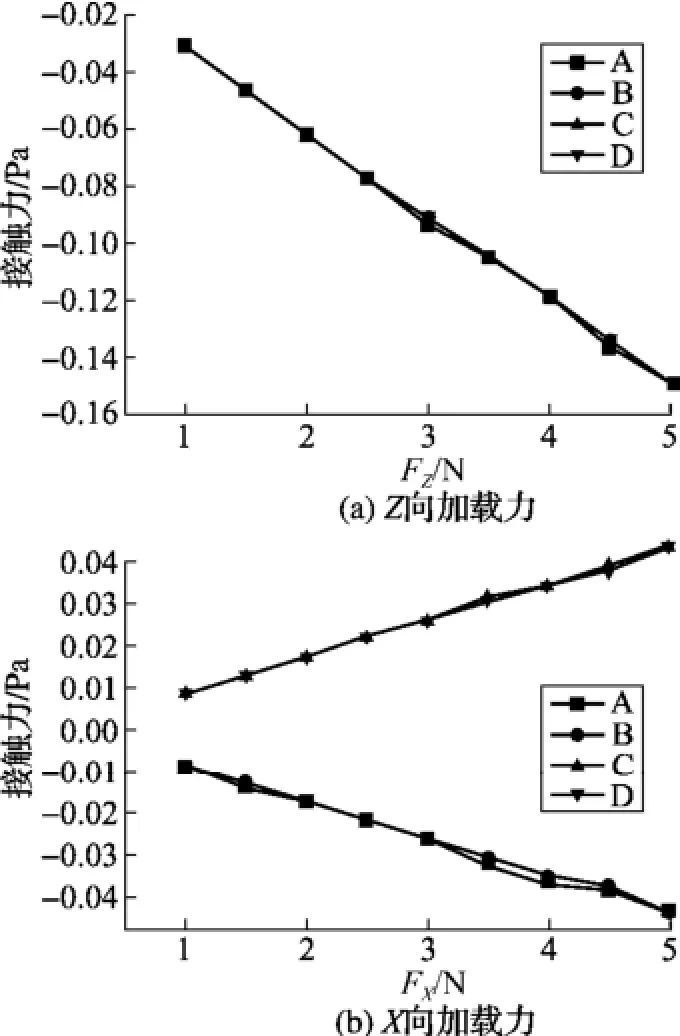
图4 A、B、C、D区域三维力作用下接触力曲线
从图3,图4中可以看出,当对传感器触头施加集中力载荷时,触头部分不发生形变,仅起到力传递的作用。随着加载力的增大。力敏导电橡胶层与A、B、C、D电极区域的接触力线性增大,但由于加载力方向的不同,R1~R4区域接触力变化的趋势不同,从而导致接触电阻R1~R4按不同的趋势变化。利用电阻R1~R4对3个方向的敏感度不同,可以得到三维力信息。由于电阻R1~R4与电极之间的接触力密切相关,可通过分析力敏橡胶层与电极之间的接触力信息来研究传感器的性能[15]。
3.3 三维力实验验证
三维力实验采用本项目研制的砝码式三维力加载平台[8],如图5所示。
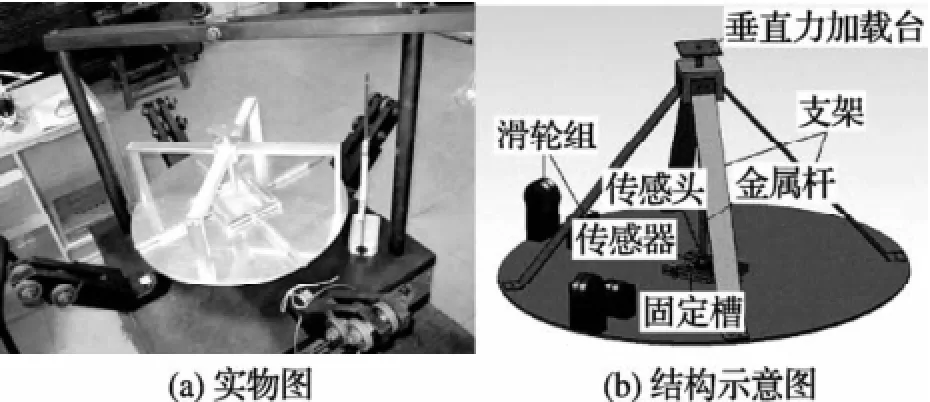
图5 三维力加载平台
图5(b)中的垂直力加载平台放置砝码,通过下方的竖直金属杆将砝码的重力传递到半球形传力触头的顶部,传力触头将所受的压力均匀作用到整个三维力传感器的表面上实现FZ的加载。用细绳一端衔接传力触头顶部,另一端悬挂砝码,通过定滑轮将垂直方向上砝码的重力转化为水平方向上作用于传力触头顶部的拉力,实现FX或FY的加载。为防止加载FX或FY时传力触头在力敏导电橡胶表面间产生滑移,预先在传感头顶部施加了一个正向压力。实验对三维力传感器分别加载FX及FZ,记录R1~R4的阻值变化,结果如图6所示。

图6 三维力作用下R1、R2、R3、R4变化
由图6(a)分析可知,FZ对传感器的作用,R1~R4的阻值变化主要由力敏导电橡胶与接触电极间的表面压阻效应引起,当FZ达到一定值时力敏导电橡胶与电极间的接触已基本达到饱和状态,继续增大FZ导致阻值的变化则主要由导电橡胶的体压阻效应引起。由图6(b)可知,FX在一定的测量范围内,R1~R4的阻值变化具有较好的线性。
三维力传感器的实验结果与理论拟合存在一定的误差,这主要是由于在构建求解三维力理论模型时忽略了体压阻效应的影响以及A、B、C、D电极的电阻间存在交叉耦合干扰,并且力敏导电橡胶为复合高分子材料,具有粘性和弹性双重机械性能(粘弹性),材料的蠕变特性导致了实际测量的误差。
综上分析可知,R1~R4阻值实际变化规律与三维力传感器理论模型的受力电阻变化分析相同,这说明传感器结构设计和和数学模型构建基本合理,具备检测三维力的功能。
4 传力部件特性及仿真
4.1 传力的触头弹性模量对传感器性能的影响
触头作为传力部件,通过研究触头部分的材料、形状和结构,选择得到传感器的最优模型。不同触头弹性模量E对传感器底部电极接触力的影响如图7。由图7可以看出,触头硬度越大,底面电极接触力越大,力的传递性能越好,传力灵敏度相对比较高。在制作传感器触头的材料选择中,应该选择硬度相对较大的材料(如酚醛塑料等)。
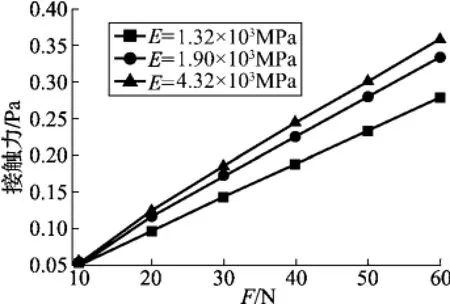
图7E对接触力的影响
4.2 不同触头形状传力效果分析
为了分析触头部分的形状对传感器性能的影响,将传感器触头设计成如图8所示的3种形状。

图8 不同形状的传感器模型
通过有限元分析3种触头模型对底部电极接触力的影响,如图9所示。可以看出,不同的触头形状对垂直方向传力的影响较小,但对剪切力的传力效果影响较大。当椭球形触头半径a=1.5b时,如图8(b)所示,底面接触力变化的灵敏度较高,将触头制成长椭球状,可提高底面接触电阻变化的灵敏度,从而提高传感器的性能。

图9 不同触头形状对垂直力和切向力的影响
5 结 论
提出了一种柔性三维力四电极对称结构传感器的设计思想,介绍了传感器结构和数学模型,并利用有限元分析软件ANSYS对传感器模型进行加载垂直力和剪切力,得到传感器应变体的应力和应变分析,通过实验分析验证了传感器数学模型和结构的合理性。研究了触头弹性模量和形状对传感器性能的影响,设计和优化了传感器模型,为用于检测三维力的柔性触觉传感器的实际应用提供了依据。
[1] Van Anh Ho,Dao D V,Sugiyama S,etal.Design of a small-scale tactile sensor with three sensing points for using in robotic fingertips[C]//2010 IEEE International Conference on Robotics and Automation,2010,Anchorage,Alaska,4855-4860.
[2] Tanaka M,Iijim T,Tanakashi Y,etal.Development of a 3D tactile sensor[J].JournalofMaterialsProcessingTechnology,2007,181(1-3):286-290.
[3] Noda K,Hoshino K,Matsumoto K,etal.A shear stress sensor for tactile sensing with the piezoresistive cantilever standing in elastic material[J].SensorsandActuatorsA:physical,2006,127(2):295-301.
[4] Hu Y,Katragadda R B,Tu H,etal.Bioinspirer 3-D tactil sensor form inimally invasive surgery[J].Journalof microelectro-mechanicalsystems,2010,19(6):1400-1407.
[5] Chen T Y,Wang Y C,Lo C Y,etal.A novel integrated transparent flexible tactile sensor[C]//Transducers 2011 16th International,Beijing,China,2011,1052-1055.
[6] Huang Y M,Tsai N C,Lai JY.Development of tactile sensors for simultaneous,detection of normal and shear stresses[J].SensorsandActuatorsA:Physical,2010,159(2):189-195.
[7] Su W S,Hu C F,Lin C M,etal.Development of a 3d distributed carbon nanotubes on flexible polymer for normal and shear forces measurement[C]//Micro Electro Mechanical Systems,2010 IEEE 23rd International Conference on,Hong Kong,China,2010,615-618.
[8] 黄英,陆伟,赵小文,等.基于碳纤维复合材料的柔性复合式触觉传感器[J].计量学报,2012,33(3):221-226.
[9] 王富耻,张朝辉.ANSYS10.0有限元分析理论与应用[M].北京:电子工业出版社,2006:1-4.
[10] 张振秀,聂军,沈梅,等.ANSYS中超弹性模型及其在橡胶工程中的应用[J].橡塑技术与装备,2005,31(9):1-4.
[11] 黄英,张玉刚,仇怀利,等.柔性触觉传感器用导电橡胶的纳米SiO2改性技术[J].仪器仪表学报,2009,30(5):949-953.
[12] 曹广辉,黄英,张武,等.三维柔性触觉传感器模型仿真及试验研究[J].电子测量与仪器学报,2011,25(2):129-134.
[13] Papakostas T V,Lima J,Lowe M.A large area force sensor for smart skin applications[J].Sensors,ProceedingsofIEEE,2002,2:1620-1624.
[14] 黄英,陆伟,赵小文,等.用于机器人皮肤的柔性多功能触觉传感器设计与实验[J].机器人,2011,33(3):347-353.
[15] Huang Y,Ming X H,Xiang B,etal.Two Types of Flexible Tactile Sensor Arrays of Robot for Threedimension Force Based on Piezoresistive Effects[C]//ROBIO 2008 IEEE International Conference on,Bangkok,Thailand,2009:1032-1037.
The Structure Research and Finite Element Analysis of
Flexible Tactile Sensor for the Detection of Three-dimensional Force
LIU Cai-xia, HUANG Ying, MIAOWei, CAIWen-ting, YUAN Hai-tao, CAO Guang-hui
(School of Electronic Science&Applied Physics,Hefei University of Technology,Hefei,Anhui230009,China)
Based on flexible pressure-sensitive conductive rubber,a flexible tactile sensor with four-electrode symmetrical structure,which has three-dimensional force detection function,is designed.Combined finite element analysis software ANSYSwith the Mooney-Rivlin theory of rubber,the strain and stress information of the flexible tactile sensor under the action of vertical force and shear stress is obtained through Finiteelementanalysis.The rationality of the structure of three-dimension force tactile sensor and the mathematical models of calculating three dimension forces was verified by experiment.By using finite element analysis on thematerials properties and geometric configuration of force transmission hemisphere,the research indicates that the hardermaterials and the prolate ellipsoid shape(radiusa=1.5b)can optimize the characteristic of the sensor.It provides the basis for the practical application of the flexible tactile sensor for the detection of three-dimensional force.
Metrology;Tactile sensor;Three-dimension force;Pressure-sensitive conductive rubber;Finite element
TB931
A
1000-1158(2014)05-0458-05
10.3969/j.issn.1000-1158.2014.05.11
2012-08-10;
2012-09-27
国家自然科学基金(61072032);合肥工业大学校科研基金(2012HGXJ0065)
刘彩霞(1975-),女,河南禹州人,合肥工业大学副教授,硕士,主要从事敏感材料与传感技术研究。hgdliucaixia@163.com
猜你喜欢
海外星云(2021年6期)2021-10-14 07:20:42
特别健康(2018年3期)2018-07-04 00:40:20
环球市场(2017年34期)2018-01-30 05:08:43
中国公路(2017年9期)2017-07-25 13:26:38
低碳世界(2016年22期)2016-12-05 11:04:42
工业设计(2016年4期)2016-05-04 04:00:20
大连工业大学学报(2015年4期)2015-12-11 04:06:50
智能建筑电气技术(2015年5期)2015-12-10 05:52:23
发明与创新(2015年30期)2015-02-27 10:39:51
浙江水利水电学院学报(2014年3期)2014-08-04 06:24:20
