
增量式数字阀在DCT主调压控制系统中的应用
2014-05-25 08:31徐文山胡北京田晋跃
中国工程机械学报 2014年3期
徐文山,胡北京,,田晋跃
(1.江苏华通动力重工机械有限公司,江苏 镇江 212000;2.江苏大学 工程机械研究所,江苏 镇江 212000)
主压力控制系统控制着主油路压力,直接影响液压系统的工作特性.当前的双离合自动变速器液压系统采用的是高速开关阀作为先导级对主压力进行调节,但是高速开关阀控制是一种机械式的高速开关调制,这就很容易导致管路的压力脉动和冲击,对系统及控制元件的工作可靠性和产品的使用寿命产生很负面的影响[1].增量式数字阀可以弥补这些缺陷,步进电机自身就是个数字化的元件,可以直接通过计算机进行控制.同时步进电机是无累积误差的,重复性能良好.增量式数字阀对阀体没有特别的要求,可以沿用现有常规阀的阀体[2].由于增量式数字阀具有许多突出的优点,所以本文设计了用于主调压系统的增量式数字阀,以替代原先的高速开关阀.
1 工作原理及结构设计
增量式数字阀的功能是实现进油口压力按照设定值保持稳定,先导阀能够控制主阀的启闭.主阀口开度受到先导阀口开度的影响,先导阀口开度又跟系统压力有关.如果系统压力比先导阀调定压力大,先导阀口开度将增大.也就是说,可以通过改变先导阀口开度的大小来控制主阀口的开度,进而控制主阀的溢流量,最终将系统平衡于设定压力.所以,先导调压弹簧预紧力决定了调定压力的大小.增量式数字阀使用步进电机控制先导调压弹簧预紧力,预紧力大,系统调定压力就高,反之就低.
增量式数字阀的阀体结构如图1所示.

图1 增量式数字阀结构示意图Fig.1 Structure of incremental digital valve
2 数学模型的建立
增量式数字阀由先导级和功率级两部分组成.先导级控制液桥采取适用于锥阀的B型半桥,由半桥液阻设计理论可知,这种设计结构简单,便于控制;功率级则采用了座阀式,级间反馈为常用的间接反馈.
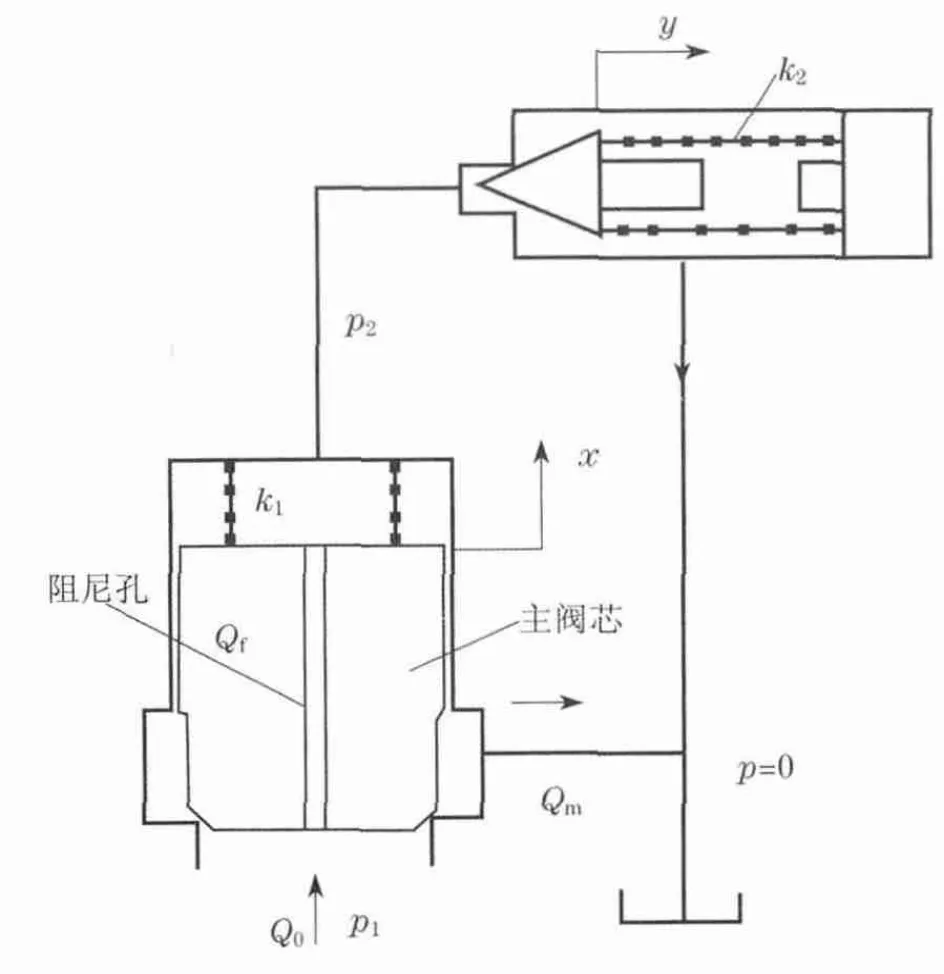
图2 增量式数字阀控制示意图Fig.2 Incremental digital valve control diagram
在建立增量式数字阀的模型时分别对先导级和功率级建模,参见图2,以力学方程和弹性流体流量方程作为建模工具建立了增量式数字阀的动力学方程[3-4].图2中,p1为输入压力;p2为先导腔压力;Q0为系统总流量;Qm为主泄油孔流量;Qf为流经阻尼孔流量;k1为主阀弹簧刚度;k2为先导阀弹簧刚度,p为系统回油压力.
阀芯运动方程:
先导阀的动态特性可以表示为一个二阶阻尼系统,其方程式为

式中:F为步进电机的控制力;A2为受压面积;m2为先导阀芯质量;y为先导阀芯位移;t为响应时间;c2为阻尼系数;y0为先导阀弹簧的预压缩量.
同理,主阀芯的动态特性也可以表示为二阶系统:
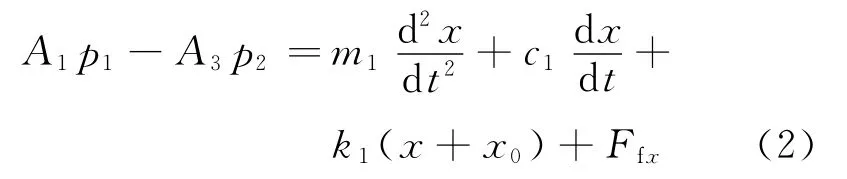
式中:A1为主阀芯下侧受压面积;A3为主阀芯上侧受压面积;m1为主阀芯质量;x为主阀阀芯位移;c1为主阀芯阻尼系数;x0为主阀弹簧的预压缩量;Ffx为弹簧预紧力.
总流量方程:

式中:Qc为流经先导阀的流量.
主泄油孔的流量方程:

式中:Cdm为主泄油孔的流量系数;α1为主阀半锥角;d1为主阀腔直径;ρ为流体密度.
阻尼孔的流量方程:
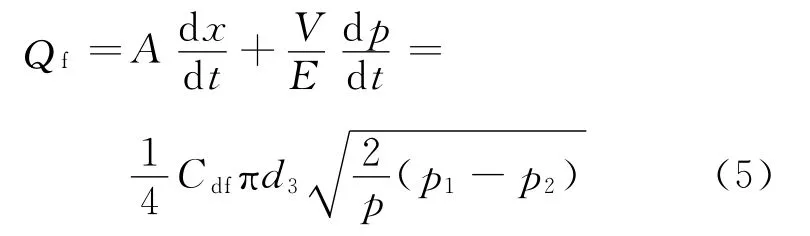
式中:A为阻尼孔截面积;V为先导阀前腔的容积;E为油液的体积弹性模量;Cdf为阻尼孔流量系数;d3为阻尼孔的直径.
先导阀流量方程:

式中:Cdc为先导阀口流量系数;α2为先导阀阀半锥角;d2为先导阀座孔直径.
增量式数字阀的压力控制系统是双输入单输出系统.理想的增量式数字阀,要求在流量干扰ΔQ0输入的情况下,阀进出口压力差Δp1几乎不变,压力的调定主要是由弹簧压紧力与控制油压力对先导阀的作用力的合力ΔF来进行控制,可通过改变阻尼孔直径和弹簧刚度等手段来提高阀的工作性能[5].
3 主调压控制系统的建模及仿真
利用AMESim建立如图3所示的增量式数字阀仿真模型.在建模过程中主要结构参数选用实际设计参数,未计入热交换对工作油温的影响.假定工作油温始终在常温下,增量式数字阀的主要参数设置如表1所示.
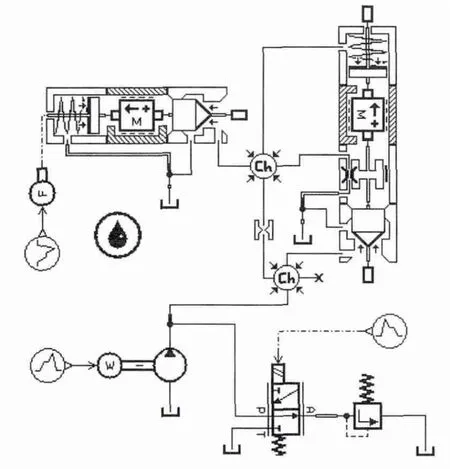
图3 增量式数字阀仿真模型Fig.3 Simulation model of incremental digital valve
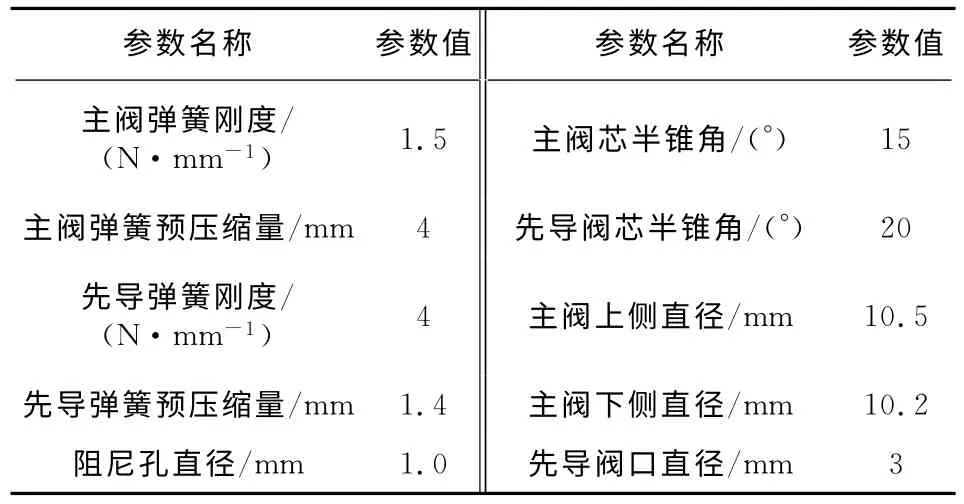
表1 增量式数字阀主要结构参数表Tab.1 Main structure parameters of the incremental digital valve
4.1 增量式数字阀的动静态工作特性
图4显示在20L·min-1的流量阶跃输入下,输出压力的变化情况.由图4可以看出,系统在设计参数下是稳定的,超调量约为15%,稳定时间为30ms左右.对于不同的结构参数,超调量和稳定时间均不一样.
图5显示了不同先导弹簧预紧力对调控压力的影响.从图5可以看出,预紧力大,调定的压力就大,而且压力的调定与预紧力的大小成正比.

图4 输出压力的阶跃响应Fig.4 Step response of the pressure
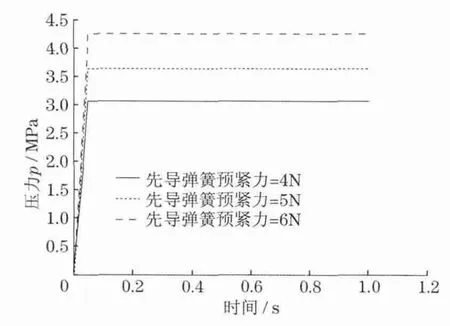
图5 先导阀弹簧预紧力对压力的控制特性Fig.5 Pressure control characteristics of the pilot valve spring preload force
4.2 动态特性影响因素分析
本文主要选取阻尼孔直径、先导阀弹簧刚度和主阀弹簧刚度这几个重要参数进行分析.
图6是阻尼孔直径为0.95mm,1mm,1.05mm时在流量阶跃输入下输出压力的动态响应特性.直径越小,超调量越大,稳定时间也较长,压力在稳定前波动较大.随着孔径增大,超调量有所降低,但没有太大变化,主要的影响集中在稳定时间上.这说明阻尼孔在系统中主要作为阻性元件使用,其直径的大小直接影响油压的稳定时间以及振幅.
图7显示了不同先导阀调压弹簧刚度对系统响应的影响.3条曲线分别是先导阀弹簧刚度为2N·mm-1,4N·mm-1,6N·mm-1时的仿真结果.仿真结果显示先导阀弹簧刚度对系统的响应影响较大.刚度较大,稳定压力也较高,稳定性更好.

图6 阻尼孔直径对阶跃输入的响应Fig.6 Step response of the diameter of orifice
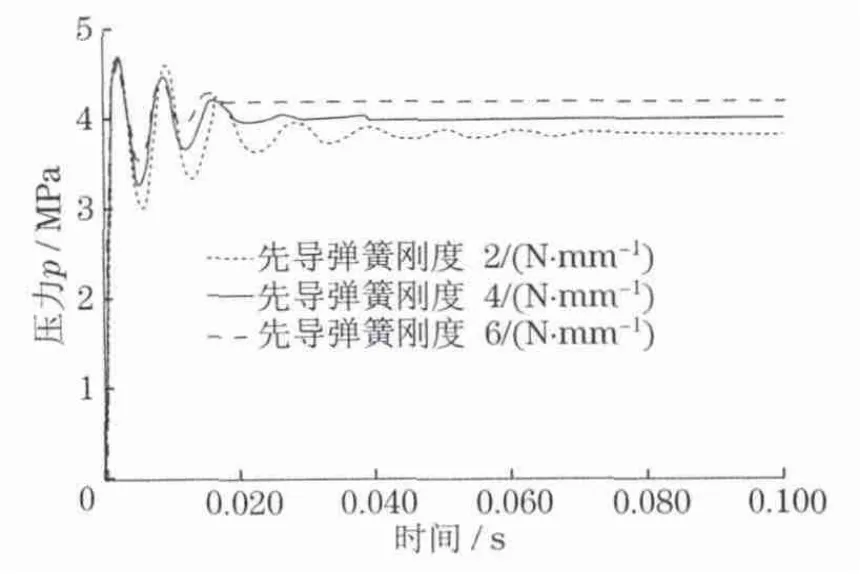
图7 先导弹簧刚度对阶跃输入的影响Fig.7 Step response of pilot valve spring stiffness
图8中的3条曲线分别是主阀弹簧刚度为1.5 N·mm-1,8N·mm-1,16N·mm-1时的仿真结果.对仿真结果分析可知,主阀弹簧刚度对系统的影响小于先导阀弹簧刚度对系统的影响.主阀弹簧刚度主要影响稳态的输出压力,主阀弹簧刚度越大,输出压力就越大,反之则越小.
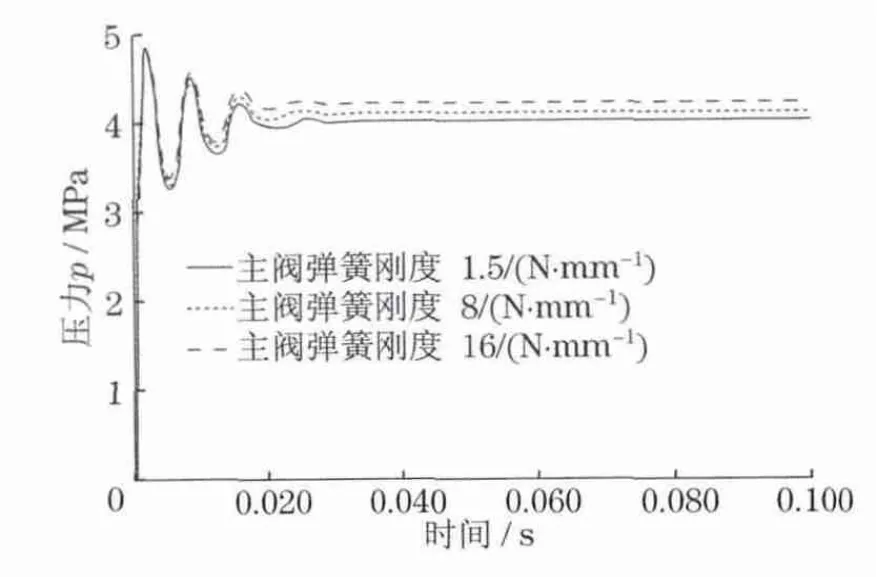
图8 主阀弹簧刚度对阶跃输入的影响Fig.8 Step response of main valve spring stiffness
4.3 增量式数字阀的抗干扰特性和压力控制特性
如图9所示,流量从10L·min-1阶跃到5L·min-1时,输出压力在阶跃流量的干扰下压力落差约为1.5MPa,经过60ms的调整时间就达到稳定;流量从5L·min-1阶跃到8L·min-1时,输出压力的变化及调整时间相对较小,总体上增量式数字阀有较强的抗干扰能力.
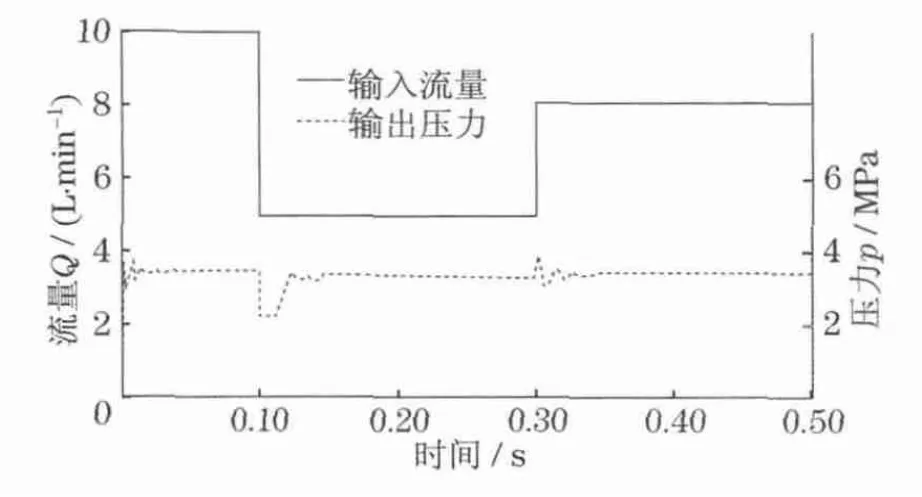
图9 不同流量下的压力阶跃响应曲线Fig.9 Step response curve of pressure under different flow
如图10为阀的增量式压力控制特性.从图10可以看出,增量式数字阀的输出控制压力与先导弹簧的预压缩量呈现良好的线性关系.
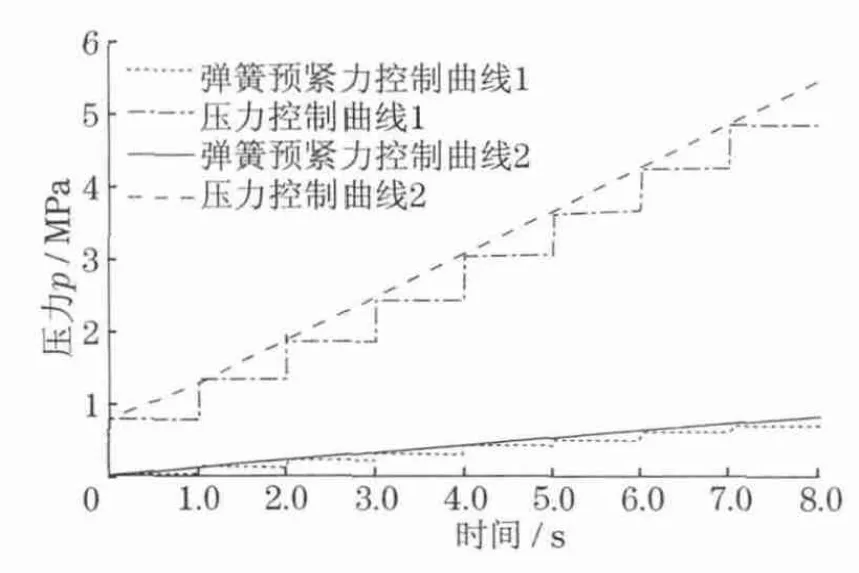
图10 增量式压力控制特性Fig.10 Incremental pressure control characteristics
5 结论
设计了用于双离合自动变速器主调压控制系统的增量式数字阀,这使得系统的控制性能有了较大的提高;增量式数字阀综合了先进的数字技术和先进的设计理念,具有很强的系统匹配性.同时增量式数字阀良好的控制特性和自锁能力,使得电液控制系统在精确控制和节能控制方面都有很好的改进空间.
[1]黄宗益.现代轿车自动变速器原理和设计[M].上海:同济大学出版社,2006.HUANG Zongyi.Automatic transmission principle and design of modern cars[M].Shanghai:Tongji University Press,2006.
[2]CHEN X,HUI G,XUAN W.Design and analysis of incremental digital valve[J].Mechanical Research & Application,2011,4:31-32.
[3]ELNASHAR G A,DIRECTOR-NGUYEN C C.Intelligent controllers based on fuzzy systems and neural networks[D].Washington:The Catholic University of America,2000.
[4]LUQUE A,QUERO J M.High pressure valves in MEMS:theory and applications[C].New York:IEEE,2002.
[5]MUSTAFA R,KASSEL T,ALVERMANN G,et al.Modelling and analysis of the electro-hydraulic and driveline control of a dual clutch transmission[C].London:FISITA,2010.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
化工自动化及仪表(2021年6期)2021-11-26
当代水产(2021年8期)2021-11-04
水电站机电技术(2020年3期)2020-04-28
中学生数理化·中考版(2019年9期)2019-11-25
天津教育·下(2018年9期)2018-07-13
导弹与航天运载技术(2018年1期)2018-03-21
自动化仪表(2017年8期)2017-08-30
筑路机械与施工机械化(2015年1期)2015-09-18
