可重构橡胶履带变体轮设计及分析
2014-05-25 08:31康少华侍才洪张学玲赵应生
中国工程机械学报 2014年4期
康少华,黄 林,侍才洪,2,张学玲,赵应生
(1.军事交通学院,天津 300161;2.军事医学科学院 卫生装备研究所,天津 300161;3.69325部队,新疆 喀什 844900)
近年来,搭载不同装置、设备,执行运输、侦查、救援抢险等不同任务的移动平台被应用于各种地形复杂且难以预测的非结构化环境中,其核心组成部分—移动机构是决定该平台应用性能的关键因素[1].传统的平台移动机构主要有轮式和履带式,其中轮式适用于平坦路面,行使速度快,机动性强,效率更高,但其越障性能差,在松软、崎岖的泥地、沙地不适用,容易陷入地面,导致车辆“搁浅”,对地面的依赖性太强.履带式移动机构是将圆环状的循环轨道卷绕在若干车轮外,使车轮不直接与地面接触,利用履带可以缓和地面的凹凸不平[2].在复杂道路,特别是沙滩、泥泞、冰雪地面条件下,履带式移动机构的附着系数均明显大于轮式移动机构的附着系数,因此在具有相同功率和重力的情况下,履带式移动机构比轮式移动机构更能发挥较大的驱动力,地形适应能力强,越障性能好,但受自身体积、重量以及结构等参数的约束,其运动速度难以提高.
20世纪90年代初,为了兼顾轮式的高机动性与履带式的高通过性,国内外研究机构开始研究轮履更换式、轮履变体式以及轮履组合式等多种采用轮履复合技术的移动机构,并取得了一定的成果[3].其中美国研制的便携式Viper侦查机器人采用Galileo公司研制的一种新型可重构底盘,又称伽利略轮,通过内部结构实现轮履转换,可以实现全天候、全地形快速机动,并且已经开始服役于美国军方.国内在这方面的研究也取得了不小的成果,如东北林业大学研制的轮履复合移动底盘,江苏八达重工研制的采用轮式和履带式双系统的国内首台30t级救援机器人等,因其各自用途、使用环境等不同,其结构也具特色,但都在一定程度上综合了轮式与履带式的优点[4].
在分析轮式、履带式移动机构环境适应性的基础上,本文提出了一种可重构橡胶履带变体轮(下文简称变体轮)设计方案.通过可重构橡胶履带的变化,实现变体轮的轮履转换.
1 全地形可重构橡胶履带轮
1.1 结构特征
本文设计的变体轮主要由可重构橡胶履带与履带伸展机构组成,如图1所示.可重构橡胶履带是变体轮的关键组成部分,其几何形状是可变的,即具有一定的伸缩性.综合轮式与履带式的优点,通过可重构橡胶履带的变化,变体轮可以实现轮式与三角履带式两种不同运动模式之间的变换以适应复杂路面上的运动,使其兼具速度快、越障性能好的优点.
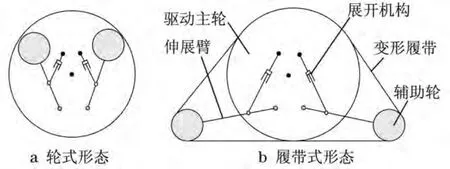
图1 变体轮结构示意图Fig.1 Structure of variant wheel
1.2 运动模式
变体轮设计有轮式与履带式两种运动模式,如图2所示.根据地面障碍物的大小不同,通过控制履带伸展机构的角度,可以调整得到变体轮合适的运动姿态[5].

图2 变体轮典型运动模式Fig.2 Typical movement patterns of variant wheel
(1)轮式模式.如图2a所示,履带伸展机构完全收回,履带呈圆形与地面接触,变体轮作为轮式运动模式行驶于较为平坦且较坚硬的路面.
(2)履带式模式.如图2b,c,d所示,履带伸展机构打开至水平,此时履带与地面接触面积最大,附着力也最大,履带式模式下的变体轮越障性能好,有利于其跨越壕沟、爬坡、上台阶等.
(3)腿式模式.如图2e所示,在履带伸展机构打开至水平后继续伸展,由伸展机构支撑变体轮,整体重心提高,有利于变体轮通过浅坑泥洼地形,此时为腿式模式.
(4)其他模式.如图2f,g,h所示,当变体轮通过单个障碍物时,伸展机构不完全伸展,前伸展臂调节角度至障碍物高度,顺势爬上,在下障碍时为提供平稳性将后伸展臂收回,通过调整两伸展臂的伸展角度可以提高变体轮的越障效率.
2 变体轮总体结构设计
变体轮作为移动平台的驱动部分需要经常行驶在各种复杂未知的路况上,所以其运动模式直接影响着平台的机动性、通过性等.变体轮采用轮履复合式的结构设计,大大提高了变体轮的综合性能,其核心部件履带伸展机构以及可重构橡胶履带是变体轮研究和开发过程中至关重要的环节.
2.1 履带伸展机构设计
从图3中可以看出,伸展机构主要由电动缸、小辅助轮、大辅助轮、伸展臂等组成,其中电动缸的推杆与伸展臂铰接,伸展臂与固定板铰接.电动缸推杆在电动缸主体内部进行活塞运动,当推杆向外推时,与之铰接的伸展臂向外伸展,通过可以滑动的大辅助轮撑开履带,使变体轮可以采用履带运动模式前进.当推杆收回时,伸展臂也随之收回,在履带自身弹力的作用下回复成圆形使变体轮可以采用轮式运动模式前进.

图3 履带伸展机构SolidWorks模型Fig.3 SolidWorks model of trackstretching mechanism
电动缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动,其特点是位置与推力控制精准,比起液压缸的优势在于使用寿命长,不会漏油.大、小辅助轮起伸展和支撑履带的作用,为使其安装方便并且与履带的接触面积大,采用两片轮设计.伸展臂在伸展过程中受力较大,故应采用高强度材料保证其结构强度,辅助轮受力较小,加工时采用尼龙材料以减轻重量,其余零件采用铝合金进行加工即可.
2.2 可重构橡胶履带设计
可重构橡胶履带是指在变体轮进行运动模式转换时可配合伸展机构的活动进行伸缩变形,根据变体轮的尺寸大小以及工作环境要求,设计的可重构橡胶履带如图4所示.

图4 可重构橡胶履带模型Fig.4 Reconfigurable rubber-track model
图4分别展示了可重构橡胶履带的轮式形态以及三角履带式形态.从图中可以看出,可重构橡胶履带可分为36个小节,每个小节由圆形突起、T形突起、两节内圈弹簧、弹簧固定块以及两侧的侧边突起组成,每四个小节安装有一根销,销的两侧安装有两个轴承.
可重构橡胶履带采用具有高弹力且抗疲劳的硫化后的天然橡胶材料整体成型制作,可以使其具有很好的收缩性[6].圆形突起与T形突起并排在履带的最外侧,在它们之间有一定间隙,当与地面接触时可以增大摩擦同时也能保证履带在伸展过程中有足够的伸长量.在履带节的中部通过弹簧固定块安装有两排拉簧,其作用是为履带的伸展收回提供拉力,使其能够迅速地伸展和收回.安装在履带两侧的轴承通过销与卡簧固定,其作用是与驱动轮的外齿啮合传动,传递驱动力矩.侧边突起参与传动啮合,增大履带与驱动轮的摩擦,从而减小履带打滑的可能性.
2.3 变体轮虚拟装配
在完成变体轮基本结构设计之后,将设计好的零部件进行虚拟装配,装配好的三维模型如图5所示.当变体轮在通过路况较好的平地时,伸展机构收回变体轮内部,整体保持轮式形式行驶,速度较快且机动性强;当变体轮在通过泥地、沟壑、坡路等非结构路面时,伸展机构打开,增大履带与地面的接触面积,越障能力较高且稳定性好,达到了变体轮的设计要求.
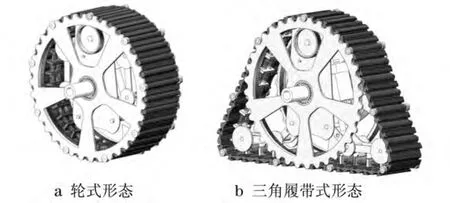
图5 可重构橡胶履带变体轮整体装配图Fig.5 Overall assembly drawing of reconfigurable rubber-track variant-wheel
3 变体轮重要部件的有限元分析
用有限元分析方法分析刚度和强度是现代设计的必要手段[7],设计人员在样机生产加工前对其进行有限元分析可以预先发现潜在问题,采用优化设计,降低材料的消耗和成本.为了验证变体轮关键受力部位履带伸展机构和可重构橡胶履带的强度与刚度是否满足要求,利用有限元分析软件ANSYS对其进行仿真分析.
3.1 履带伸展机构的有限元分析
履带伸展机构在电动缸推杆的作用下控制履带的展开和收回,受力较大且使用较为频繁.如果伸展臂在该过程中发生变形甚至断裂将导致变体轮无法有效地进行轮履转换,失去可重构的意义,因此对其进行有限元分析尤为重要.
履带伸展机构的三维模型如图6所示.为便于计算,对其进行必要的简化处理,主要包括:① 去除对整体计算影响不大的大、小辅助轮;② 去掉不影响整体性能的倒角、螺纹等;③ 轴销联接简化为固连.

图6 履带伸展机构三维模型Fig.6 Three-dimensional model of trackstretching mechanism
将简化后的伸展机构三维模型导入ANSYS软件.模型单元采用三维实体单元Solid45,伸展机构的材料是钢,其力学指标弹性模量为2.06×1011Pa,泊松比为0.27,密度为7.8×103kg·m-3,屈服极限为355~500MPa.电动缸推杆的推力可达1 000N,由于伸展臂具有一定的力臂,通过大辅助轮作用在履带上的力只有300N,方向为辅助轮与履带接触部分的法线方向.考虑到变体轮在行走过程可能遇到的冲击振动,将该力大小乘以2,即600N施加在大辅助轮轴上.小辅助轮与履带接触,起支撑履带的作用,在其上施加300N作用力,方向竖直向上.在伸展臂与固定板的连接轴末端与推杆末端施加全约束.图7为其网格划分模型及边界条件示意图.

图7 履带伸展机构网格划分模型及边界条件Fig.7 Finite element analysis model and boundary condition of track-stretching mechanism
图8为履带伸展机构应力云图.在履带伸展过程中,最大应力为139MPa,出现在推杆与伸展臂的连接处,远小于其材料屈服极限,满足使用要求.

图8 伸展机构应力云图Fig.8 Stress cloud image of truck-stretching mechanism
3.2 可重构橡胶履带的有限元分析
为了减少计算量,取履带的一部分,并将多余的销轴和轴承去掉,如图9所示.因为主要想验证的是外圈履带的伸缩性,为进一步方便计算,将履带的内圈弹簧及弹簧固定块去除.
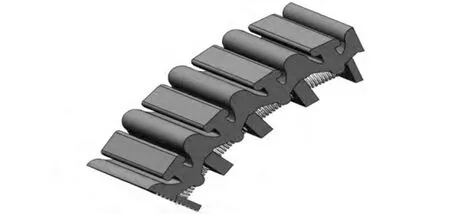
图9 简化的履带三维模型Fig.9 Simplified three-dimensional model of track
将简化后的履带模型导入ANSYS软件中,因为橡胶材料可以承受大弹性变形,且认为其各项同性和几乎不可压缩,使用两参数的MooneyRivlin准则求解,单元类型选择Solid185.已知硫化天然橡胶泊松比为4.9,弹性模量为35MPa,MooneyRivlin常数c10和c01分别为2MPa和0.5MPa.划分网格后,将履带模型的一侧施加全约束,考虑到内弹簧被去除,施加在另一侧的载荷为伸展力减去拉伸弹簧所需要的力,即230N.网格划分模型及边界条件如图10所示

图10 履带网格划分模型及边界条件Fig.10 Finite element analysis model and boundary condition of track
图11为履带变形云图,部分履带在施加载荷后其变形达到了43.389mm.履带在圆形状态下和三角履带式状态下周长分别为2 512mm和2 885 mm,截取了履带的九分之一用来分析,其变形量达到41.5mm即足够,所以履带的伸缩性满足要求.

图11 履带变形云图Fig.11 Deformation cloud image of track
4 结论
[1]肖俊君,尚建忠,罗自荣.一种多姿态便携式履带机器人运动设计及分析[J].机械设计与制造,2007(8):134-136.XIAO Junjun,SHANG Jianzhong,LUO Zirong.The mobility analysis of a kind of man-portable caterpillar robot[J].Machinery Design & Manufacture,2007(8):134-136.
[2]王朝阳,胡淼,汤永红.轮履复合式移动机器人设计及越障功能分析[J].机械传动,2010(4):10-12.WANG Chaoyang,HU Miao,TANG Yonghong.Design and analysis of surmouning obstacle function for wheel-track robot[J].Mechanical Transmission,2010(4):10-12.
[3]李海泓.轮履变结构反恐机器人设计与研究[D].哈尔滨:哈尔滨工业大学,2011.LI Haihong.Design and research of anti-terrorism robot with wheeled-tracked variable structure [D].Harbin:Harbin Institute of Technology,2011.
[4]陈淑艳,陈文家.履带式移动机器人研究综述[J].机电工程,2007,24(12):109-112.CHEN Shuyan,CHEN Wenjia.Review of tracked mobile robot[J].Electrical and Mechanical Engineering,2007,24(12):109-112.
[5]LIU J G,WANG Y C,MA S G,et al.Analysis of stairsclimbing ability for a tracked reconfigurable modular robot[C]//IEEE International Workshop on Safety,Security and Rescue Robotics.Piscataway,NJ:IEEE,2005:36-41.
[6]侯忠明,姚凯,王胜军.可更换橡胶履带轮的发展与应用[J].橡胶工业,2009,56(12):764-767.HOU Zhongming,YAO Kai,WANG Shengjun.Development and application of replaceable rubber track wheel[J].China Rubber Industry,2009,56(12):764-767.
[7]张利勇.高炉炉顶维修机器人设计[D].上海:上海大学,2008.ZHANG Liyong.The design of blast furnace maintenance robot[D].Shanghai:Shanghai University,2008.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
兵器装备工程学报(2021年3期)2021-04-09
军民两用技术与产品(2021年10期)2021-03-16
小型微型计算机系统(2018年6期)2018-07-04
计算机系统应用(2017年10期)2017-10-20
北京航空航天大学学报(2017年10期)2017-04-20
科技视界(2014年6期)2014-12-24
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01