基于改进CORDIC算法的数字预失真实现
2014-05-11 07:29刘太君
无线电通信技术 2014年3期
王 顶,刘太君,叶 焱
(宁波大学信息科学与工程学院,浙江宁波315211)
0 引言
在移动通信系统中,射频功率放大器(PA)作为移动通信系统中的重要组成部分,其效率和线性度影响着整个系统的性能。在4G系统中,提高功放效率的一种有效手段是采用Doherty技术,同时为了提高频谱利用率,广泛地采用了线性调制技术和多载波调制技术(如OFDM和CDMA),这样一来传输信号具有高宽带、高峰均值比(PAPR)和非恒定包络等特性,这些都需要PA具有高的线性度。数字预失真技术(DPD)的出现解决了功放的非线性失真问题,目前DPD大多采用基于QR分解的RLS算法的脉动阵列结构来实现。
QR分解有多种实现方式,其中Givens旋转由于具有并行性的优点应用于脉动阵列的设计中。然而传统的脉动阵列结构存在诸多问题:①Givens旋转单元存在平方根运算,在硬件实现时,平方根运算需要消耗大量的资源,且时间周期长;②对于通常采用多项式模型的功放来说,由于采用了N抽头和M阶的多项式,如果采用脉动阵列结构,其输入就有N×(M+1)项,这对于FPGA的资源是一个极大的挑战[1-4]。解决以上2个问题现有的方法是采用CORDIC算法,但正如文献[5]指出的,传统的CORDIC算法存在多余的角度旋转和角度扩展等问题,对于一般的乘除运算影响不大,对于脉动阵列来说,由于CORDIC计算存在误差通过脉动阵列逐级的积累而放大,甚至导致错误的输出结果。因此,传统的CORDIC不适合用于实现数字预失真的脉动阵列结构。因此,提出一种改进CORDIC算法来实现数字预失真,该方法易于FPGA实现、资源消耗少且计算速度和精度方面都有所提高。
1 CORDIC基本原理
坐标旋转数字计算机(Coordinate Rotation Digital Computer CORDIC),是由Jack Volder[6]于1959年提出的,广泛应用于基本函数的计算。为了扩展可解决的基本函数个数,之后又相继提出了统一的CORDIC算法和并行的CODIC算法,大大提高了CORDIC算法的迭代速度和精度。随着可编程逻辑器件(FPGA)规模的增大,使得利用硬件电路实现该算法成为可能。
下面来描述CORDIC算法的基本原理,如图1所示,假设平面直角坐标系一矢量(x0,y0),将其顺时针旋转角度θ,得到新的矢量坐标(x1,y1)如式(1)所示:


图1 CORDIC算法向量旋转原理图
进一步推导得:

任意角度都可以表示成一系列的基本角度的线性之和,则旋转角度θ可表示为[5]:

式中,di表示旋转的方向是顺时针还是逆时针di={+1,-1}。为了便于硬件实现,令θi=tan-1(2-i),这里引入一个方程:zi+1=zi+diθi,表示迭代过程旋转的角度之和。则式(2)可重写为:

向量经过一系列的基本旋转后可逐渐逼近目标向量,此时有:

式中,cosθi表示旋转校正因子,令Kn=cosθi为经过n步迭代后总的旋转校正因子,则有:

当n足够大时,Kn近似取值为一常数0.607 253,可以将这个常数作为系统的增益来处理。
2 CORDIC的改进
2.1 多余旋转角度问题
如旋转角度θ=arctan(20)时,理论上经过第一次旋转后已经得到了目标向量,而传统CORDIC需要经过N次旋转,这就导致旋转误差。在每一级旋转增加控制信号来判断是否进入下一级的旋转,避免一些不必要的旋转。
2.2 角度扩展问题
由于θi=tan-1(2-i),根据推导CORDIC算法的旋转角度范围为(-99.9°,+99.9°),不能覆盖整个坐标平面。为了确保算法的收敛,文献[5]中采用增加2个45°的迭代来达到收敛,这种方法对于单输入信号较为实用,然而对于预失真来说,由于预失真训练器采用了多项式模型,增加迭代次数的同时增加了算法的复杂度,为此对输入(x0,y0)进行了预处理,具体操作步骤如下:预先判断向量的象限,将其搬移到第一和第四象限。最后利用一个符号标志位sign判断旋转角度和输出。即当x<0时,sign=1;当x>0时,sign=0。这样将信号的旋转角度限制在了第一和第四象限,从而降低了额外的迭代带来的复杂度。
2.3 校正因子分解
由式(6)可知,直接在旋转之后增加一个乘法器来补偿旋转模长,这种方法使得原本由移位器加减实现的流水线结构变得复杂,乘法器的速度限制了整体的流水线吞吐量,同时还增加了硬件资源消耗。为了解决乘法运算所带来的资源消耗和运算速度的降低得问题,每一级旋转所对应得伸缩因子Ki的理论值和近似值,可通过简单地移位和加减来实现长度补偿如表1所示。

表1 第i次旋转对应的校正因子值
2.4 改进CORDIC流水线结构分析
以开根号运算为例,采用Verilog HDL语言描述改进CORDIC算法的向量模式,数据位宽为14bit,角度位宽为16bit,流水线级数为13级,Quartus II仿真分析和综合结果如图2所示。
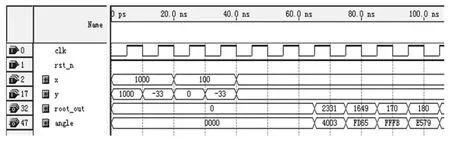
图2 改进CORDIC算法Quartus II仿真图
表2和表3分别列出了CORDIC算法改进前后的资源和精度对比。

表2 改进前后运算速率及资源对比

表3 改进前后计算精度对比
从表2和表3中可以看出,由于加入了控制信号和符号标志位,逻辑资源消耗有所增加,但改进后的CORDIC算法的运算速率和计算精度都有提高,且没有乘法器和ROM存储单元。同时对于特殊的角度值,运算结果与理论之间没有误差,极大地减少了迭代的次数。这对于预失真这种数据处理量大的应用,可以节约许多时间。
3 数字预失真实现
基于改进CORDIC算法的四通道QR-RLS脉动阵列实现结构如图3所示,图中三角阵列有2种运算单元,圆形表示边界单元,工作在向量模式;方形表示内部单元,工作在旋转模式[7-10]。阵列边界单元工作在向量旋转模式,此时φ-CPE单元将输入数据xin旋转到x轴,输出向量为,同时给出旋转角度φ,此时的2个θ-CPE单元仅有左边的工作,它输出将消去的旋转角度θ,同时储存相关矩阵R值。内部单元工作在旋转模式,如图4所示。根据边界单元的φ和θ实施旋转,并将旋转角度值传递给下一个单元。CPE单元设计采用高速流水线结构,采用这种结构能够获得较高的数据速率,在单元执行第i次旋转时,数据能够同时从顶部输入,采用N级相似的算法单元在同一个时钟周期内并行工作,平均完成一次计算只需一个时钟周期,这极大地节约了运算时间。
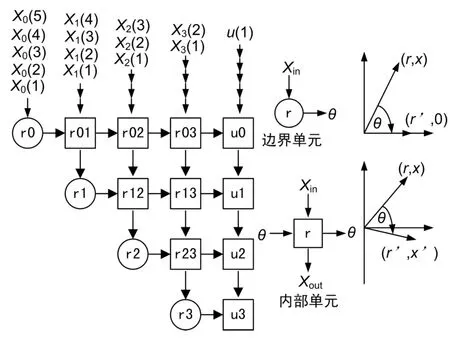
图3 四通道QR-RLS算法的脉动阵列结构

图4 基于改进CODRDIC算法的CPE单元
4 实验结果
将2种算法实现的脉动阵列在FPGA上实现,对比结果如表4所示。
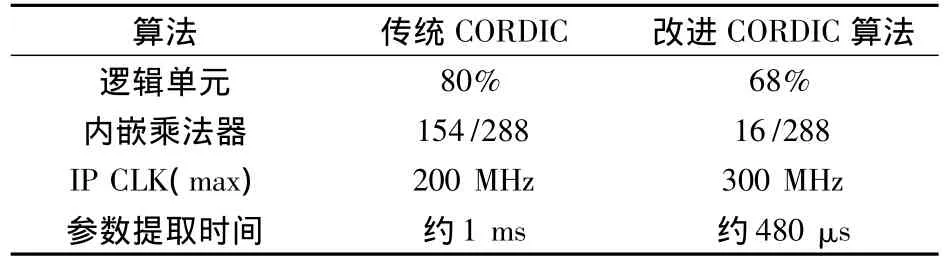
表4 两算法实现脉动整列的对比
由表4可以看出,在资源消耗方面,脉动阵列采用了3阶5抽头的多项式,由于传统的CORDIC算法使用了ROM表和乘法器单元,总的资源消耗就相当的大。在运算速度上,传统的CORDIC算法使用了乘法器,限制了脉动阵列的整体速度,改进算法的IP CLK相对传统的提高了100MHz,因此参数提取的时间将近节约一半的时间。
预失真实验测试平台如图5所示,频谱分析仪观测功放输出频谱如图6所示。从图中可以看出,传统的CORDIC算法实现的参数提取算法预失真效果不明显,甚至有些地方失真更为严重,这是由于传统CORDIC本身存旋转误差以及多余的角度旋转造成的误差,这些误差经过脉动阵列逐级传递,误差积累导致最终的参数提取不正确。然而改进CORDIC算法有效地避免了多余迭代带来的误差,获得了较好的预失真效果。

图5 硬件测试平台

图6 2种算法实现DPD输出频谱比较图
5 结束语
对传统CORDIC算法的原理及其存在的问题进行了深入的分析,从多余角度旋转、旋转角度扩展和模校正因子分解3个方面对算法进行改进,采用跳跃旋转、象限搬移以及移位加减来实现CORDIC算法。与传统的CORDIC算法相比较,节省了大量的硬件资源,提高了运算速度和精度,易于FPGA实现。最后,采用改进的CORDIC算法实现了预失真参数提取算法,实验结果显示预失真效果改善了18dB左右,满足功率放大器的实时性和高线性度要求。
[1]LIU Tai-jun,SLIM B,FADHE M,et al.Augmented Hammerstein Predistorter for Linearization of Broad-Band Wireless Transmitters[J].IEEE transactions on Microwave Theory and Techniques,2006,54(6):1340-1349.
[2]MORGAN D R,MA Z KIM J,ZIERDT M G,et al.A Generalized Memory Polynomial Model for Digital Predistortion of RF Power Amplifiers[J].IEEE Transactions on Signal Processing,2006,54(10):3852-3860.
[3]CAVERS J.Amplifier Linearization Using A Digital Predistorter with Fast Adaptation and Low Memory Requirements[J].IEEE Trans.Veh.Technol,1990,39(4):374-382.
[4]艾渤.高功率放大器线性化技术研究[J].微波学报,2007,23(1):62-69.
[5]WU Cheng-shing,AN Y W.Modified Vector Rotational CORDIC(MVR-CORDIC)Algorithm and Architecture[J].IEEE Transactions On Circuits and Systems-II:Analog and Digital Processing,2001,48(6):548-561.
[6]VOLDER J E.The CORDIC Trigonometric Computing Technique[J].IRE Trans.Electron.Computers,1959,(C-8):330-334.
[7]HAYKIN S.Adaptive Filter Theory[M].2nd ed.Englewood Cliffs,NJ Prentice-Hall,1991:210-254.
[8]WARD C R,ROBSON A J,HARGRAVE P J.Application of A Systolic Array to Adaptive Beam Forming[J].IEEE Proceedings of Communications,Radar and Signal Processing,1984,131(6):638-645.
[9]MA J,DEORETTERE E F,PARHI K K.Pipelined CORDIC based QRD-RLS Adaptive Filtering Using Matrix Look-Ahead[J]IEEE Workshop on Signal Processing Systems,1997,35(2):131-140.
[10]CHANG L W,LEE S W.Systolic Arrays for the Discrete Hartley Transform [J].IEEE Trans.Signal Processing,1991(29):2411–2418.
猜你喜欢
东莞理工学院学报(2022年5期)2022-11-02
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
小型微型计算机系统(2021年12期)2021-12-08
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
数学小灵通(1-2年级)(2020年6期)2020-06-24
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
网络安全与数据管理(2017年4期)2017-03-10
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23