超磁致伸缩电液伺服阀驱动机构控制系统设计
2014-05-10 07:47杨朝舒何忠波李冬伟薛光明
机床与液压 2014年23期
杨朝舒,何忠波,李冬伟,薛光明
(军械工程学院车辆与电气工程系,河北石家庄050003)
0 前言
电液伺服系统具有单位功率质量小、力—质量比大、工作频带宽、鲁棒性好和抗过载能力强等优良特性,在现代航空工业、汽车工业等领域得到了广泛地应用。电液伺服阀(Electro Hydraulic Servo Valve,EHSV)是电液伺服系统最重要的部件,它是沟通电子器件和液压器件的桥梁,对整个系统的动态性能起着决定性的作用[1]。
超磁致伸缩材料(Giant Magnetostrictive Material,GMM)是一种能够在外磁场作用下发生较大变形的新型磁功能材料,具有响应速度快、能量密度大、居里温度高等一系列优良特性[2],将GMM 运用于EHSV 驱动机构之中所设计而成的超磁致伸缩电液伺服阀,具有结构紧凑、精度高、响应速度快的特点,其最大输出流量达2 L/min,带宽可达650 Hz(-3 dB)[3]。为了将GMM 响应迅速的特性在EHSV 的开发中充分体现出来,本文作者设计了能够高速、高效控制GMM 机构工作的驱动和控制系统,该控制系统基于PicoScope2203 数字示波器和STC89C51 单片机,通过上位机发出指令,既能实现高频下任意波形的开环控制,又能够实现占空比可调的闭环PWM 控制。此外,该控制系统的集成度很高,操作也比较便捷。
1 GMM 电液伺服阀结构和工作原理
图1 是GMM 电液伺服阀的结构示意图。其工作原理为:给激励线圈通入幅值电流,产生激励磁场。通过改变激励电流的大小和方向可以改变激励磁场的大小和方向,进而使GMM 棒的长度发生变化,推动顶杆,并最终带动阀芯产生位移输出[4]。

图1 GMM 伺服阀结构图
2 驱动机构控制系统的组成和工作原理
为了实现EHSV 阀芯的高速运动和精确控制,必须要尽量减小从上位机发出指令信号到阀芯产生位移的反应时间,并尽量提高采样频率。整个控制系统硬件部分分为控制、驱动和采集三大部分,控制系统的结构图和实物图分别如图2、3所示。

图2 控制系统结构图
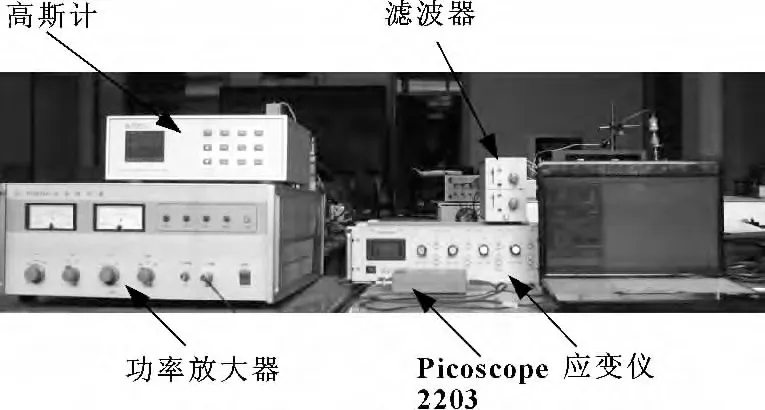
图3 控制系统实物图
(1)控制部分
控制部分的作用是根据上位机的指令产生相应的控制信号,处理键盘响应,接收采集部分采集到的电信号,主要由PC 机、PicoScope2203 数字示波器、STC89C51 单片机组成。
PicoScope2203 数字示波器由英国Pico Technology公司生产,集成了信号发生器、A/D、D/A 转换器、示波器的功能。无需单独供电,通过计算机数字量控制,可以实现±2 V 以内任意波形输出和双通道±20 V 以内电压信号的采集。在控制系统中,Picoscope2203 被用于产生周期性激励信号,并接收传感器采集到的位移、力反馈信号;STC89C51 单片机是一种低功耗,高性能的8 位单片机。片内带有4 K 字节的闪速可编程及可擦写储存器(EPROM),可以在线对存储器进行重新编程。在控制系统中用于实现伺服阀的PWM 控制。
(2)驱动部分
驱动部分由GF800 功率放大器和GMM 驱动机构组成,用于将控制信号进行放大,并驱动GMM 机构产生位移,进而带动阀芯运动。
(3)采集部分
采集部分由HN808 电涡流传感器及其前置器、YDL-1X 石英晶体压电力传感器、电荷放大器组成,用于采集阀芯产生的动态位移和力信号,并转化成电信号,反馈给控制部分。
图4 为超磁致伸缩驱动机构的实物图。

图4 超磁致伸缩驱动机构实物图
3 软件设计
3.1 信号驱动部分程序
PicoScope2203 数字示波器中对于驱动信号波形的选择有两种方式,一种选择固定波形:仪器内置波形包括方波、正弦、锯齿波信号;另一种是通过任意波形产生模块(Arbitrary Waveform Generator,AWG),首先生成一组描述所需波形的序列,其元素为0~255 之间的整数(即每个元素均为BYTE 型变量),然后设置信号的频率和幅值等参数以及读取波形序列的长度。仪器会根据上述参数和序列描述的波形,周期性的产生所需要的激励信号。信号驱动部分程序设计流程如图5所示。

图5 信号驱动部分程序流程图
3.2 数据采集部分程序
PicoScope2203 数字示波器的采样方式主要有3种:Block 模式,Streaming 模式和ETS(Equivalent Time Sampling)模式[5]。Block 模式下的采样频率非常高(<1 μs),超过了计算机的读取速度。仪器会将采集到的数据首先存入自带的存储器之中,然后以数据块(Block)的方式向计算机传输,这种方式可以很迅速地捕捉到系统输出信号的变化,但由于仪器存储单元有限,无法进行长时间的数据采集;Streaming 模式下采样频率相对较低,仪器会将采集到的数据直接存入计算机内存之中,记录数据的长度由计算机内存来决定,且不存在延迟,适合于采样频率要求不高的长时间采样;ETS 模式适用于长时间采集周期信号的情况,通过若干个周期的采集,仪器将得到的重复性信号进行合成处理,使得其等效采样频率高于单个周期的采样频率。
在控制系统中,综合利用上述3 种采样模式,可以拓宽控制系统的使用范围。Block 模式用于测量系统的瞬态响应;Streaming 模式用于测量系统的稳态响应。并且,装载了各种传感器的灵敏度后,可以直接得到各待测量的变化曲线;ETS 模式主要用于触发器的设置。采集部分的程序流程如图6所示。
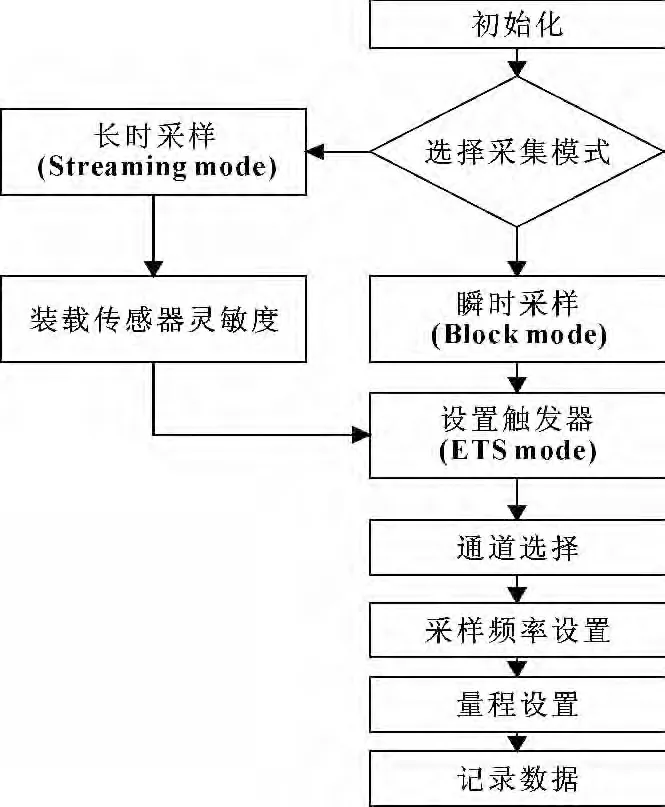
图6 数据采集部分程序流程图
3.3 PWM 控制程序
PWM 控制采用STC89C51 单片机来实现,该型号的单片机没有专用的PWM 硬件资源[6],所以采用定时器方式,在P2.1 端口产生,其频率和占空比通过串口通信的方式由上位机指定,其控制流程如图7所示。控制系统的上位机软件界面如图8所示。

图7 PWM 控制部分程序流程图

图8 控制系统人机界面截图
4 系统控制
4.1 控制策略
驱动机构中的GMM 本身具有很强的磁滞特性,又工作在多场耦合的环境中,系统非线性成分比较大,其精确地物理模型难以建立。PID 控制在生产过程中是一种最普遍采用的控制方法,其最大的特点是不必建立系统精确的数学模型[7]。通过实验整定比例、积分、微分3 个参数,可以取得较好的控制效果。在电磁阀的控制策略中,采用增量型算法,其表达式如下:

式中:Δu(k)为控制器的输入增量;e(k)为k时刻输出量与参考量之间的误差;kp,ki,kd为控制参数。
4.2 控制方法
系统采用PWM 信号控制驱动机构的输出位移,通过不断调节驱动信号的占空比,实现对电磁阀流量的调节。PWM(Pulse Width Modulation)脉宽调制技术的基本原理为:
假设在周期T内,驱动机构的位移为x,

其中,t0为接通时间,将上式用傅里叶级数进行展开,最终得到

其中,α 为占空比,ω=2π/T。
滑阀的流量特性可用式(4)描述:

当雷诺数Re>260,系统压力保持恒定时,参数Cd,W,Δp可视为常数[8],由于驱动信号的开关频率比伺服系统的截止频率高很多[9],通过伺服阀的实际流量可视做由阀芯位移的直流分量所引起,即:

式(5)说明,可以通过改变驱动信号的占空比α 来控制伺服阀的流量。
在驱动机构能够完全响应的前提下,驱动信号的开关频率越高输出波纹就越小,但是过高的开关频率会影响驱动机构的寿命,所以要在输出波纹可接受的条件下尽量降低开关频率[10]。
5 结论
(1)介绍了GMM 电液伺服阀的结构和工作原理,探讨了GMM 电液伺服阀的PWM 控制方法和PID控制策略。
(2)设计了基于PicoScope2203 数字示波器和STC89C51 单片机的GMM 电液伺服阀的测试与控制系统,该系统具有集成度高、操作便捷等特点。
[1]俞军涛,焦宗夏,吴帅.基于液压微位移放大结构的新型压电陶瓷直接驱动阀设计及仿真[J].机械工程学报,2013,49(2):151-158.
[2]王博文,曹淑英,黄文美.超磁致伸缩材料与器件[M].北京:冶金工业出版社,2008.
[3]张雪梅,李光彬.超磁致伸缩材料致动器用于开关式数字阀驱动的研究[J].机械研究与应用,2006,29(5):34-35.
[4]翁玲,王博文,孙英.超磁致伸缩致动器的输出位移与其控制研究[J].仪器仪表学报,2006,27(7):800-803.
[5]PicoScope 2000 Series PC Oscilloscope Programmer's Guide[M]:Pico Technology Ltd,2009.
[6]举平,余为清,杨树军.一种高速开关阀新型驱动系统设计[J].机床与液压,2012,40(21):117-119.
[7]刘金琨.先进PID 控制及其MATLAB 仿真[M].北京:电子工业大学出版社,2002.
[8]赵伟,张凯,黄钰瞾.一种大流量高速开关阀的设计与实验研究[J].液压与气动,2013,265(9):38-40.
[9]鲁中良,吴丰顺,张尧,等.PWM 技术在电液换向阀流量控制中的应用[J].液压气动与密封,2003,100(4):33-36.
[10]堵利宾,张河新,李建朝,等.新型高速开关阀单片机PWM 控制电路及的设计及应用[J].液压与气动,2007,40(11):67-69.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
电子制作(2017年13期)2017-12-15
电子制作(2017年20期)2017-04-26
电子世界(2017年17期)2017-04-14
现代电子技术(2016年15期)2016-12-01
光学精密工程(2016年6期)2016-11-07
专用汽车(2016年4期)2016-03-01
雷达与对抗(2015年3期)2015-12-09