
一种基于自适应模糊PID控制的移动电源设计
2014-04-23 02:22赵莉华张亚超任泽生
电源技术 2014年4期
梁 勇,赵莉华,张亚超,任泽生,金 阳
(1.四川大学电气信息学院电气工程系,四川成都 610065;2.西昌卫星发射中心宜宾测量站,四川宜宾 644000)
线性稳压电源具有稳定度高、输出纹波电压小、瞬态响应快、结构简单和成本低等优点,但其转换效率低,很难在一个通用的电压范围内工作。开关稳压电源的转换效率高,而且可以通过多种控制方法实现较宽的稳压范围,被誉为高效节能电源,它代表着稳压电源的发展方向,现已成为稳压电源的主流产品。
移动电源模块的发展趋势为高效率、高功率密度、高可靠性,与此同时,它还要有良好的动态性能和适应宽输入范围的能力。本文提出一种可以在多种模式下工作的四开关Buck-Boost变换器,以其作为两级式变换器的前级可以使得额定输入电压附近效率最高,同时其输入电压变化范围较窄,从而为后级的优化设计创造条件。
由于PID具有算法简单,鲁棒性好等优点,所以被广泛地用于开关电源控制回路之中。但是常规的PID参数整定方法复杂,由于参数的整定不当,往往性能欠佳。而近来发展起来的模糊控制法不依赖被控对象的数学模型,便于利用经验和知识实行控制,非常适合复杂可变或不能准确描述数学模型的系统。所以本文综合两者的优点采用模糊PID参数整定控制算法来实现对四开关Buck-Boost变换器的控制。
1 四开关Buck-Boost变换器的结构和2种工作模式
如图1所示,四开关Buck-Boost变换器由两个部分组成:Q1与QSR1为Buck单元,Q2与QSR2为Boost单元。定义d1和d2分别为Q1与Q2的占空比,则图1中A、B两点的平均电压分别为

图1 四开关Buck-Boost变换器结构

四开关Buck-Boost变换器最基本的控制方式是Q1与Q2同时开通和关断。当Q1和Q2导通时,输入电压给电感Lf1补充能量,Cf1向负载提供能量;QSR1、QSR2导通时,电感Lf1给Cf1充电,同时向负载提供能量。采用单模式控制时,四开关Buck-Boost变换器的直接功率比重为0,很难实现高效率。
根据推导电路的直接功率比重为:pdirect/po=d1-d2,为了增大直接功率的比重,应尽量增大d1,减小d2。
当 Vin≤Vo时,d1+d2≥1,因此可以让 d1取最大值 1,这样Q1一直处于导通状态,而QSR1一直处于关断状态,此时通过调节d2来调节输出电压,四开关Buck-Boost变换器等效为一个Boost变换器。当Vin>Vo时,d1+d2<1,可以让d2取最小值0,即Q2一直处于关断状态,而QSR2一直处于导通状态,此时通过调节d1来调节输出电压,四开关Buck-Boost变换器等效为一个Buck变换器。因此我们称这种控制方式为两模式控制。
在这种控制方式下,任何时候都只有两只开关管高频工作,与单模式控制的四只开关管高频工作相比,总的开关损耗大幅减小。两模式控制时电感电流脉动大幅度减小。
接下来以降压模式为例详细分析电路的控制方法。
2 模糊自适应PI控制器设计

最早用来整定PI参数的是Ziegler-Nichols法,但有时控制性能不能满足实时性的要求,如超调量、上升时间等指标不能全面兼顾。而模糊控制器可以根据专家经验和大量仿真结果,通过一系列模糊规则自动对PI参数进行校正,使控制系统的性能满足给定的要求。本文提出模糊-PI控制器如图2所示,通过在线调整Kp,Ki参数,使其变为自适应模糊PI调节器,提高了控制精度及控制器的动态性能。

图2 参数整定模糊PI控制器结构
2.1 模糊控制器的输入量、输出量及模糊子集和论域
取电压误差E和电流误差的变化Ec作为模糊控制器的输入,输出量为 ΔKp,ΔKi。将 E,Ec,ΔKp,ΔKi分别定义为五个模糊子集,即 E=Ec=ΔKp=ΔKi={NB,NS,Z,PS,PB}。其中,NB、NS、Z、PS、PB分别表示负大、负小、零、正小、正大等模糊概念。
2.2 隶属度函数和模糊决策表
当E的绝对值较大时,为了有良好的跟着性能,取较大Kp;同时为避免超调现象,应对Ki进行限制,通常取0;当E绝对值较小时,为了使系统具有良好的稳态性能,取较大Kp和Ki;当E绝对值适当时,为使有较小超调,Kp应小点,Ki的值适当。最后生成模糊规则如表1和表2所示。

表1 K的模糊控制规则

表2 ΔK的模糊控制规则
在Matlab中键入Fuzzy命令,进人模糊逻辑编辑窗口,建立输入和输出的隶属函数,如图选择的是高斯型隶属函数。在各语言变量论域上,描述模糊子集的隶属函数如图3所示。

图3 输入输出量的隶属函数
根据表1和表2可以得到50条控制规律:

对于表1有如下的控制规则形式:If(E is Ai)and(Ecis Bj)then(ΔKpis Cij)。式中:i,j={-2,-1,0,1,2}。设由第(i,j)条规则得到的模糊关系为:Rij=Ai×Bj×Cij。则总的模糊关系为:

采用Max-Min推理合成规则,得ΔKp的隶属函数为:C(ΔKp)=[Ai(E)∧Bj(Ec)]。R。
式中:“ ”表示笛卡尔积;“∧”表示Min运算;Ai(E),Bj(Ec)分别表示模糊集Ai,Bj的隶属函数;“∧”表示Max运算;“。”表示Max-Min推理合成算法。
2.3 解模糊
解模糊采用加权平均法,取输出模糊集合隶属函数的加权平均值作为结果。控制精确量输出为:

3 仿真实验
Ui的输入范围为11~25 V时,输出为15 V,负载电阻R=20Ω,工作频率为20 kHz,纹波电压要求为输出电压的0.2%,为保证电路工作在连续模式下,取L=3×10-4H,C=300 μF。根据降压模式下的小信号模型,可以推出电路对于占空比的开环传递函数为,将数据带入可得
3.1 两模式控制和单模式控制比较结果
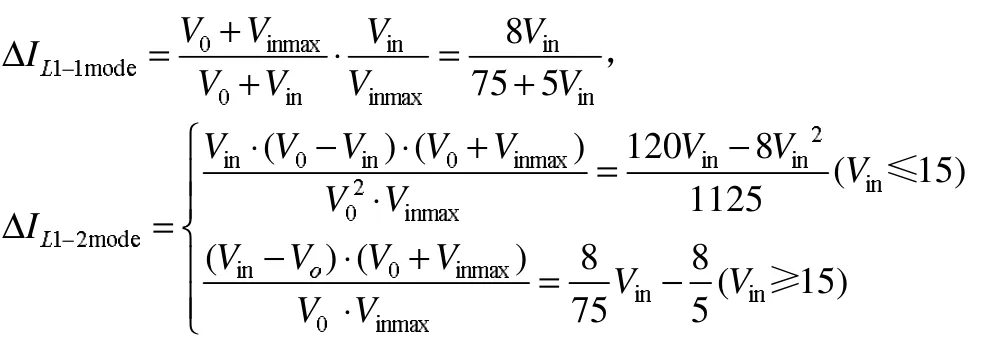
分别推导出四开关电路在单模式和两模式下电感电流的波动值,并进行标幺化处理得:
从图4中可以看出两模式下电感电流波动减小,且由于直接功率的提高导致电路的变换效率有一定的提高。
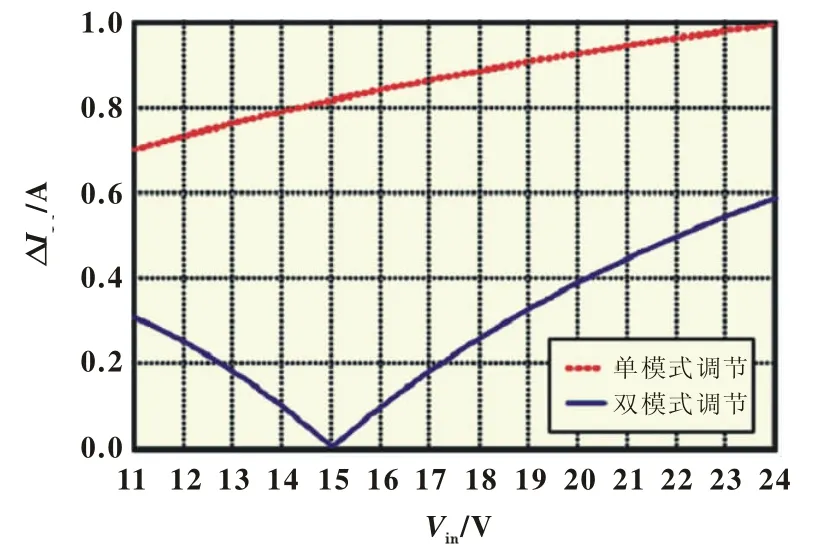
图4 两种模式下电流波动比较
3.2 采用参数整定模糊PI控制方式的仿真结果
图5为传统PI控制仿真图,图6为传统PI控制下电路输出电压,图7为参数整定自适应模糊PI控制仿真图,图8为参数整定自适应模糊PI控制下输出电压。图6、图8所示的是当Vin=25 V时,分别采用传统PI控制与模糊自整定PI控制时电路的阶跃响应。很明显,由于模糊控制判断语句的作用,后者在超调量和稳定时间上的控制效果都要好,但同时稳态误差变小。

图5 传统PI控制仿真图

图6 传统PI控制下电路输出电压
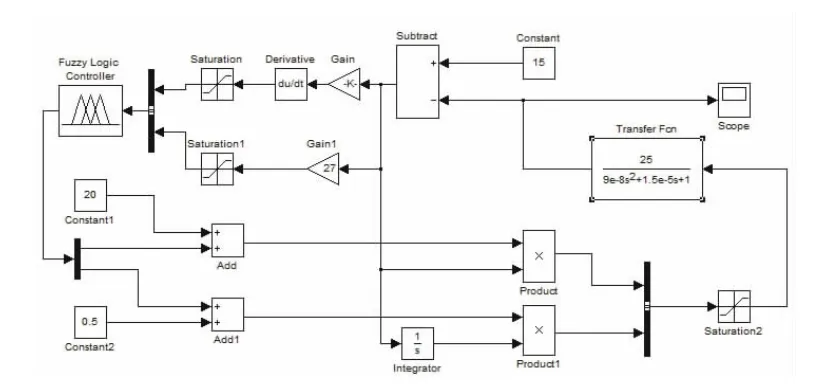
图7 参数整定自适应模糊PI控制仿真图

图8 参数整定自适应模糊PI控制下输出电压
4 结论
利用模糊自适应PI控制方法来实现四开关Buck-Boost变换器在两种工作模式下的DC-DC变换。通过对Kp、Ki的自适应调整,使控制器具有更好的控制效果。由仿真结果可知,这种该方法能发挥PI和模糊控制两者的优点,能在更短的时间内达到稳定,超调更小。同时模糊自适应PI控制具有较强的自适应能力和鲁棒性,能够较好地适应在控制过程中被控对象变化以及外来扰动突然进入系统的情况。另外在两模式控制下比传统单模式控制有更高的效率和更小的电流波动。通过这两方面的设计能保证移动电源的高性能和高效率。
[1]HANG K,CHONG G,PID Y L.Control system analysis design and technology[J].IEEE Trans Control Syst Technol,2005,13(4):559-576.
[2]HSIEH CH.Optimal fuzzy immune PID controllers design of PWMDC-DC converters[C]//North American Fuzzy Information Processing Society.Toronto,Canada:North American Fuzzy Information Processing Society,2007:123-128.
[3]郭唐仕,尹华杰.Buck变换器的数字模糊PID控制[J].电源技术应用,2002,5(5):181-184.
[4]YUSOFFMJ,ISMAIL N F N,MUSIRIN I,et al.Comparative study of fuzzy logic controller and proportional integral derivative controller on DC-DC Buck converter[J].IEEE symposium on Industrial Electronicsand Applications,2011,11(2):235-239.
[5]任小永,唐钊,阮新波.一种新颖的四开关Buck-Boost变换器[J].中国电机工程学报,2008,21:15-19.
[6]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[7]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2009.
[8]RAHMA A,RASHIDI F,RASHIDIM.A hybrid fuzzy logic and PID controller for control of nonlinear HVAC systems[J].IEEE International Conference on Systems,Man and Cybernetics,2003,3:2249-2254.
[9]杜飞,杜欣.电力电子应用技术的MATLAB仿真[M].北京:中国电力出版社,2008.
[10]葛宝明,林飞,李国国.先进控制理论及其应用[M].北京:机械工业出版社,2007.
猜你喜欢
莆田学院学报(2021年5期)2021-11-13
甘肃科技(2020年20期)2020-04-13
电子制作(2019年23期)2019-02-23
测控技术(2018年2期)2018-12-09
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年6期)2016-04-20
电测与仪表(2016年1期)2016-04-12
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
