
基于MAX2769B的多系统兼容GNSS中频采样器设计与实现
2014-04-19 11:21:02伊国兴侯振环魏振楠
导航定位与授时 2014年3期
伊国兴,侯振环,魏振楠
(哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨 150001)
基于MAX2769B的多系统兼容GNSS中频采样器设计与实现
伊国兴,侯振环,魏振楠
(哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨 150001)
摘 要:GNSS软件接收机具有算法灵活性高、更新方便等特点,逐步发展为一种较为流行的卫星导航研究与应用平台。从处理多频多系统的角度出发,介绍射频前端的基本结构,对比了几款单芯片GNSS射频解决方案,详细介绍一套基于MAX2769B的多频多系统兼容中频采集系统的设计与实现过程,给出了多系统兼容的参数配置方法。对于采样器研制过程中与性能关系较为密切的部分,提供了设计参考建议与测试流程。针对设计的采样器,测试了其采集GPS系统L1频点信号的性能,并通过后端的软件接收机处理得到了信号捕获、跟踪、测量与定位结果,基于这些结果对中频采样系统的基本功能、多频处理能力等进行了分析和评估。
关键词:软件接收机;射频前端;多系统兼容;多频点;MAX2769B
0 引言
基于专用集成电路(ASIC)的传统GNSS接收机由于算法不易改变,在高动态、弱信号以及楼宇间多径干扰等场合下难以正常工作[1]。GNSS/ INS组合导航虽然能一定程度上提高系统的整体性能,但松散以及紧组合仅仅是GNSS辅助校准惯性器件,GNSS系统的性能未得到提高[2]。
随着集成电路技术的发展,软件接收机的思想逐步被提出。软件接收机最大的特点是灵活,新的方法可以快速的进行验证并投入使用,所有的算法都在软件中实现,在不改变硬件设备的情况下为后期系统的升级更新提供了可能[3]。
作为软件接收机中唯一的硬件部分,射频前端承担着卫星信号调理以及数模转换的工作。接收机收到的GNSS信号极其微弱,并且存在频段共用,因此射频前端需要具有线路带宽大、接收灵敏度高、链路噪声增益小、频率分辨力强等特点[4]。射频前端的性能直接影响到整个软件接收机的工作性能。
目前多个GNSS系统正在运转或建设中,未来空域中同时可见GNSS星的数目将会远大于解算所必需的4颗[5]。但不同系统在信号形式、频点、带宽等方面互不兼容[6],因此研究能同时接收不同系统信号的接收机具有较大的意义。
本文主要介绍一款多系统、多频点兼容中频采样系统的设计与测试过程,提出了设计的注意点以及完整的测试方法,并对设计的系统进行性能评估。
1 系统的结构和组成
整个采样器分为射频链路、胶合逻辑、数据采集、电源四部分,整个系统框图见图1。
射频链路负责处理天线收到的卫星信号,完成信号调理、下变频与模数转换工作,将射频信号转换为数字中频信号。胶合逻辑部分将射频链路转换后的数字信号打包成数据采集需要的格式,生成触发信号。数据采集部分将采集到的数字中频信号通过USB2.0接口实时上传到电脑,由电脑进行存储。电源部分为模拟与数字电路提供所需的低噪声电源,确保其稳定工作。
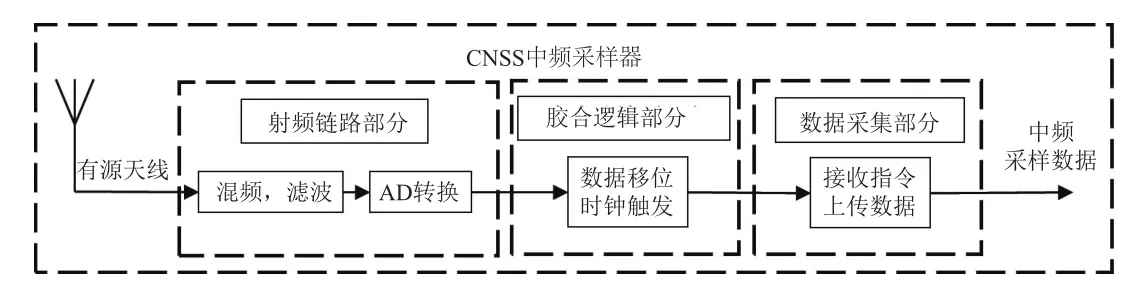
图1 中频采样器结构框图Fig.1 IF sampler structure diagram
1.1射频链路方案选择
传统接收机前端多采用Zarlink公司的GP20xx系列芯片[7],但由于其设计年代较远,限于芯片加工工艺,整片的噪声系数与功耗较大,现已基本淘汰[8]。RTL2832U是一款数字电视接收芯片,可以设置为SDR模式,通过自带的USB接口实时上传中频数据,采样频率与带宽满足GPS信号的要求,可以完成软件接收机射频链路的工作[9]。但这款芯片在设计上并未考虑卫星导航的需求,链路阻抗为75Ω,与常见的接收天线不匹配,中频频点设置困难。SE4110L是一款高度集成的GPS接收机前端芯片,包含了整个射频链路[10],但其仅能提供同向信号的结果,采样有效位固定,限制了其在算法研究方面的灵活性。
MAX2769B是一款通用的GNSS接收机芯片,可应用于GPS、GALILEO、GLONASS、北斗系统,集成了完整的接收机链路,仅需少量外部元件,即可构建完整的低成本GNSS射频链路方案[11],并能非常方便的修改参数,因此本系统采用MAX2769B作为射频链路处理芯片。
1.2射频链路处理流程
根据中频采样理论,射频链路需要完成窄带滤波、下变频、增益放大、本振(LO)生成、模数转换等操作,对应于MAX2769B不同的模块,其内部集成了完整的接收链路,不需要外部LNA,总级联噪声系数仅1.4dB。
由MAX2769B构成的射频链路工作流程为:有源或无源天线收到的卫星信号,首先经过一级低噪声放大器(LNA)进行放大,之后通过外接声表面滤波器(SAW)进行射频带通滤波,之后与本地振荡器倍频后的信号(LO)混频,完成下变频操作,信号由射频下变频到中频。中频信号通过中频滤波电路,除掉其中包含的噪声基底,之后经过自动增益放大器(AGC),将信号强度变为适合后面AD转换的大小[13]。变换之后进行AD转换,转换为2Bit的数字量,并输出采样用的时钟,以供同步使用。整体流程图如图2所示。
采样输出结果为同向通道的2bit数据,为符号位(SIGN)与幅值位(MAG),分别表示输出信号的正负和幅度值。符号位0代表正,1代表负;幅值位0代表1,1代表3。

图2 射频链路部分信号流程Fig.2 RF link part signal process diagram
1.3时钟处理
整个采样系统的时钟由MAX2769B提供,是胶合逻辑以及数据采集的基础,而MAX2769B需要外接有源晶振作为其参考时钟。参考时钟有两个作用,一个是倍频得到混频所需的本振LO信号,另外就是作为ADC的时钟。对于时钟频率的确定,需要综合考虑后期的算法以及所需的解算精度,以及所需要采用的导航系统,不同系统频率的选择将在第2节表述。对于GPS系统,一般选取16.367667MHz[13]。
本振与射频信号混频得到中频信号,对参考时钟的精度与稳定性要求较高,例如1×10-6的频率误差相当于1.575kHz的多普勒频移[14]。因此参考频率的产生应采用温补晶振(TCXO),以减小其对系统精度的影响。
晶振输出经过10nF电容耦合到射频芯片,而对于MAX2769B产生的系统时钟,其稳定性与同步性决定了整个系统的性能,但其带负载能力有限,经过PCB导线后会产生畸变,上升沿变得平缓,不利于后面的系统辨别。为避免系统时钟被负载拉低,此处加上一级高速比较器MAX961,由比较器的输出作为系统时钟。
1.4数据传输部分
由于采样频率约16.368MHz,并使用2bit量化,故生成中频数据速率约为4MB/s。计算机常见的数据采集方式有串口、并口、USB以及挂接在PCI、ISA总线上的采集卡。专用采集卡由于涉及到总线协议操作,开发任务量大,而串并口的传输速度最大约为1MB/s[15],无法满足本系统要求。USB协议其最大速度480Mbit/s,除去协议开销与代码效率,传输速度可保持在35MB/s,满足系统要求,并且开发较为方便,因此选择作为本系统的传输方式。
本 系 统 选 择 Cypress半 导 体 公 司 的CY7C68013作为数据传输芯片。该芯片符合USB2.0协议标准,支持480Mbit/s的信号速率,以其良好的性能和独特的设计在USB接口开发领域中占有重要的地位。Cypress提供完整的上位机API以及固件设计模板,开发方便。
1.5胶合逻辑电路
MAX2769B输出灵活,可配置为1位、2位或3位量化,综合考虑传输负载与存储方便性,选择2位量化输出。为了提高灵活性以及适用不同采样位数,这里用可编程逻辑器件(CPLD)实现格式转换与触发。

图3 胶合逻辑部分结构框图Fig.3 Glue logic part structure diagram
根据CY7C68013的FIFO写入时序,SLWR引脚的下降沿将作为FIFO进栈的触发信号,此时GPIF上的16位数据将被锁存。由于是异步操作,SLWR信号是通知采集的唯一标识,下降沿产生时刻应保证GPIF总线上数据已经稳定并保持3个采样周期以上。GPIF总线宽度为16位,而每次采样仅有2bit数据,因此需要等待8个采样周期,压缩成16bit,放到总线上,并发出触发信号,通知68013读取入FIFO。
胶合逻辑部分功能如图3,采用VHDL语言编写,整个工程耗费逻辑单元24个,引脚35个,选择Altera公司的EPM240T100C5作为本系统的逻辑控制芯片。
1.6电源部分
卫星导航信号非常微弱,户外信号接收功率小于-160dBW(-130dBm),低于热背景噪声约16dB[14],所以整个采样系统的噪声要求苛刻,各个部分应采取独立的电源供电。
电源部分分为5块:USB芯片电源、CPLD电源、温补晶振供电、射频模拟供电、射频数字供电。其中射频数字电源为VCCD、VCCADC供电,射频模拟电源为VCCRF、VCCVCO、VC-CPLL、VCCIF供电。每个供电子单元采用低噪声LDO器件TPS79230,其热噪声平均27μV。LDO可以隔离掉电源母线上的纹波,保证输出电压的稳定。每个单元输入输出均有10μF与0.1nF的瓷片电容作为退耦电容,进一步保证输出电压的稳定。
1.7电磁兼容性与信号完整性
射频链路部分有少量的射频PCB布线,为最大限度减小信号损耗,需要考虑将阻抗匹配到50Ω。对于本系统,顶层铜箔下为地层,故采用“地层共面波导”模型计算,匹配后的导线宽度0.3356mm。
为减小系统的噪声,PCB采用4层结构,使用单独的电源层与地层,并且将射频链路部分做成孤岛的形式,便于后期安装屏蔽罩,最大限度隔离数字部分的干扰。由于MAX2769B并未区分数字地与模拟地,并且QFN封装四周没有GND引脚,仅有芯片背面热焊盘与GND相连,因此需要保证热焊盘的可靠焊接。
2 多系统兼容参数设计
目前可用的GNSS包括GPS、GLONASS、GALILEO、IRNSS、QZSS以及我国的北斗系统,除GLONASS外,其他均采用CDMA格式信号。不同系统拥有不同的载波中心频率及信号带宽,需采用不同的采样器配置参数,包括晶振频率、采样率、LO倍频数、中频滤波中心频率、通频带宽等。多系统兼容与互操作不仅是对空间段提出的要求,也是对射频前端提出的要求。对于射频前端,要求能通过合理的参数配置,兼容不同的系统。
2.1单前端采集单系统参数设计
对于单系统前端,仅需确定合适的LO频率,保证下变频后的有用信号处于中频滤波器通频带内,同时采样频率满足奈奎斯特采样定律,即可保证采样的有效性。故而,参数的选择具有极大的灵活性。
对于 GPS的 L1频点,载波fc1=1540f0( f0=1.023MHz),信号带宽 fBW1=2f0。初选fLO=1536f0, 故 得 到 的 中 频 中 心 频 率 fCEN=(1540-1536) f0=4f0,取采样频率 fsa=16f0,设置中频滤波器的 fCEN=4f0,带宽BW=2f0,即可保证采样要求,这也是本文实验采取的频率参数。
2.2单前端采集多系统参数设计
对于单前端完成多系统采样的应用,由于一次下变频不能改变多系统频点间距,将导致中频滤波器带宽过大,采样频率过高,从而难以进行参数选择。根据专利文献[16]中给出参数设计方法,通过与LO的混频以及AD采样的混频,实现两次频率搬移,达到将多系统有用信号集中在较窄的频带内的目标。
下面以同时采集GPSL1频点与北斗B1频点为例阐述参数选择方案。B1频点载波 fc2=1526f0,信号带宽 fBW2=4f0,首先选择LO频率进行一次频率搬移,取 fLO=1502f0,此时得到两个中频信号fCEN1=38f0, fCEN2=24f0,可见此时两频段的间隔保持不变。取采样频率 fsa=18f0,小于两个中频信号频率,故属于带通采样,相当于再进行一次混频,得到新的中频信号,,此时的信号满足采样定理,可以正常采样。中频滤波器作用在第一次下变频后,取 fCEN=30f0,BW=20f0。
此方案优点是仍然保持了单次LO混频,但导致中频滤波器带宽过大,实现困难。改进方法是采取二次LO混频,对二次混频后的信号进行中频滤波,降低中频滤波器的压力,但会增加系统的复杂性。
2.32769参数设计举例
多系统兼容需要配置NDIV、RDIV、FCEN、FBW四个寄存器。对于L1频点,当 fsa=16f0,可取RDIV=16,NDIV=1536,FCEN=001101(4MHz),FBW=00(2.5MHz)。但由于民用限制,美信公司并未公布FCEN寄存器其他配置代码所对应的中心频率,因此一定程度上限制了其互操作的应用。
3 性能测试和验证
本节通过一系列实测实验来验证本中频采样器的各项性能,实验所用信号源为GNSS信号模拟器,可生成GPS L1、BDS B1两种信号,直接通过馈线将模拟器信号输出连接到接收机天线接口,不经过空气传导,避免了衰减与室内多次反射。信号源所选的时间段为UTC时间2014年2月14日8:00至8:15,起始点纬度N45°,经度E126°,高程200m,载体的运动情况根据实验内容而异。根据模拟器内置星历,本时段内测试位置理论可见GPS卫星编号为:(3)(4)(17)(22)(23)(27)(28)(29)。实验所用的中频采样器如图4所示。
实验中所采用的软件接收机代码,由参考文献[4]提供,代码采用Matlab语言编写。

图4 采样器组装后照片Fig.4 Assembled sampler photo
3.1关键信号波形测量
对于所设计的中频采样系统,关键信号包括有源晶振参考时钟、ADC参考时钟、SLWR、并行数据。
(1)晶振参考时钟与ADC时钟输出
此信号是整个系统时钟的基础,其稳定性与精度直接影响采样器性能,测试内容主要为信号的频率与峰峰值。图5中可以看到经MAX961处理后的波形陡峭稳定。

图5 晶振时钟输入与AD参考时钟输出Fig.5 Crystal oscillator input andAD reference clock output
(2)SLWR写信号
本系统的FIFO为异步操作,需要保证SLWR信号下降沿后数据稳定3个采样周期以上,虽然在CPLD逻辑设计上已经得到了保证,但其决定了数据采集的稳定性,因此需要实际测量。图6为SLWR信号与并行数据DB0的对比,可以看到在SLWR下降沿时,数据已经稳定并正确保持3个周期,符合设计要求。
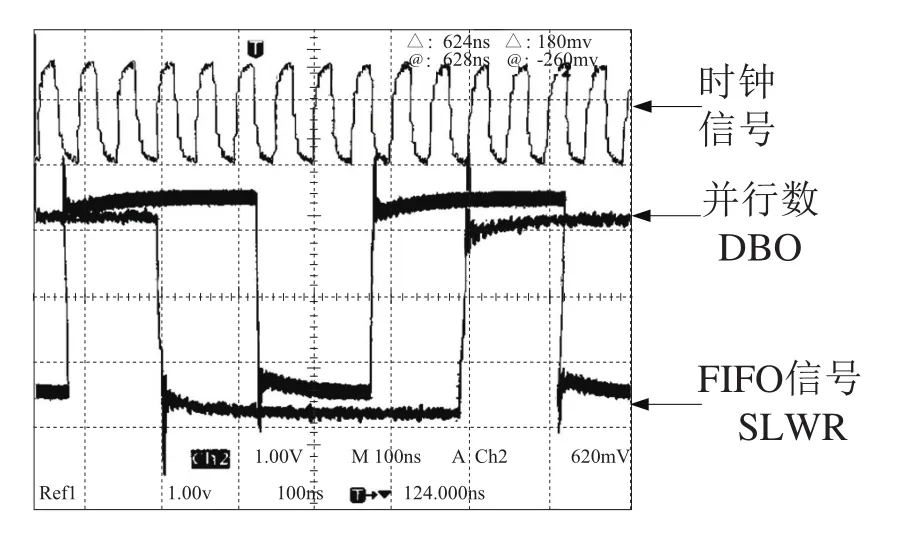
图6 写信号、并行数据与时钟关系Fig.6 Relationship of write signal,parallel data and clock
(3)并行数据
整个数据采集部分没有任何错误校验机制,因此并行数据传输的错误将直接反映到采集数据的正确性。对于并行数据测试主要针对信号的眼图,示波器实测结果如图7,可以看到CPLD输出结果在经过传输后仍能保持锋利的信号边沿,减小被芯片误读的可能性。
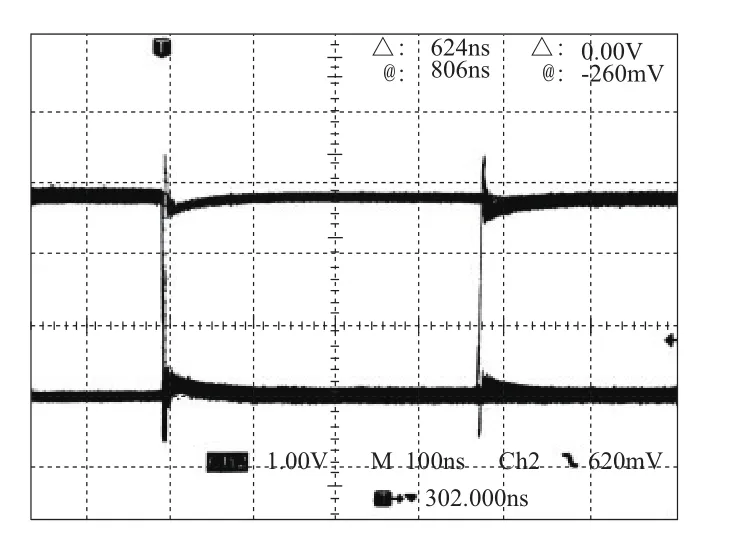
图7 并行数据眼图Fig.7 Parallel data eye diagram
3.2采样测试
本组实验验证采样器数据采集以及自动增益放大、中频滤波器的性能。在模拟初始点静止的场景下,采样60s,设置中频4.092MHz,对采样得到前20ms数据进行分析,得到的时域、频域以及柱状统计如图8所示。
可以看到,采样的时域信号杂乱无章。通过matlab中pwelch函数得到的频域结果,可以看到信号的功率主要集中在以4MHz为中心,宽度为2.5MHz的范围内,与中频滤波器的设置相符。由柱状统计图可以看出,整个采样结果呈正态分布,符合伪随机噪声码采样的白噪声特性。

图8 采样结果分析Fig.8 Sampling results analysis
3.3窄带滤波器性能测试
本组实验验证外接窄带射频滤波器对于卫星搜索的影响。SAW滤波器应用压电晶体振荡器材料的压电效应,可以得到理想的带通滤波器效果,但缺点是插入损耗较大。对于MAX2769B,预留了外接SAW的引脚,若不需要,可以通过电容进行连接。本实验所采用的SAW为台湾TST公司的TA1575IG滤波器。模拟器信号同时提供给两套采样设备,一组采用SAW滤波,作为对比,另一组直接采用电容连接。
在模拟初始点静止的场景下,分别对比两套设备采样结果在同一软件接收机代码下的信号捕获能力,捕获信号的相关强度见表1。可以看到,与直接电容连接相比,外接SAW后真实存在卫星信号的相关峰值并未明显增加,但虚假信号的相关峰值明显减弱,因此可以减小判断信号存在的阈值,从而有利于弱信号的捕获并降低虚警率。

表1 SAW滤波前后相关峰值对比Tab.1 SAW filter correlation peak contrast
3.4射频线路性能测试
本组实验验证射频线路阻抗匹配对于信号性能的影响,对比内容仍为信号捕获能力。实验采用两套设备,一套是考虑布线阻抗匹配后的设计,作为对比,另一套是本采样器的前期版本,布线阻抗未进行匹配。

表2 阻抗匹配前后相关峰值对比Tab.2 Impedance matching correlation peak contrast
在模拟初始点静止的场景下,得到的信号的相关强度对比见表2。与不匹配线路相比,严格匹配后真实信号的相关峰值增大,虚假信号的峰值基本不变,因此对于真实存在但强度较低的信号,匹配后的线路更容易搜索到,因此设计过程中应尽量做到线路匹配。
4 结论
从信号的频谱可以看出,采样器可以完整的复现接收到的伪随机噪声信号。所选用的MAX2769B芯片,中频频点与带宽设置灵活,适合用作多系统兼容GNSS软件接收机前端。正如文中第二部分所述,此芯片未将中频滤波器的配置代码完全公布,无法通过调节下变频的频率规划来实现单前端采集多系统,一定程度上限制了使用。性能测试对比试验表明,对于射频链路,需要严格的阻抗匹配,对于所确定采用的频点,外接SAW滤波器不仅能提高信噪比,而且对于弱信号捕获与跟踪性能有一定的提高。
参考文献
[1]王玉娥.基于MAX2769的GPS软件接收机[J].河北工程大学学报:自然科学版,2012,29(3):109-112.
[2]曾庆双,李仁,陈希军.基于软件定义无线电的紧耦合GNSS/INS组合导航结构[J].中国惯性技术学报, 2010(05):567-573.
[3]肖宇扬.基于MAX2769的GPS/Galileo双模单频软件接收机技术研究[D].上海交通大学,2011:87.
[4]Borre K,Akos D M,Bertelsen N,et al.A software-defined GPS and Galileo receiver:a single-frequency approach[M].Springer,2007.
[5]He H,Li J,Yang Y,et al.Performance assessment of single-and dual-frequency BeiDou/GPS single-epoch kinematic positioning[J].GPS Solutions,2013:1-11.
[6]赵琳,高帅和,郭丽姝.GNSS射频前端的多频信号兼容采样[J].中国惯性技术学报,2010,18(3):316-320.
[7]Kelley C W,Niles F,Baker D.Development of the Open Source GPS Software Receiver Emulator[C]. ION GNSS 2007:2808-2812.
[8]奚芳华.软件卫星接收机技术及实验研究[D].南京理工大学,2013:84.
[9]J M Friedt G G E.E4k and RTL2832U based Software-Defined Radio[Z].2012.
[10]白明明.基于DSP-FPGA架构的弹载GPS接收机的研究与实现[D].南京理工大学,2010:81.
[11] 徐晓.GNSS软件接收机的研究与实现[D].北京:中国矿业大学,2012:117.
[12]唐康华,吴美平,胡小平.基于射频前端的GPS软件接收机设计与验证[J].中国惯性技术学报,2007,15(1): 51-54.
[13]Choudhury M,Wu J,Shivaramaiah N,et al.Development of a Software GNSS/RNSS Receiver with Carrier-Phase Output[J].2012.
[14]Budiyono A Principles of GNSS,Inertial,and Multisensor Integrated Navigation Systems[J].Industrial Robot:An International Journal,2012,39(3).
[15] 王伟.基于USB2.0的高速数据采集与传输系统的研究[D].吉林大学,2007:79.
[16] 哈尔滨工业大学.单射频前端采集多频点多系统卫星导航信号的方法及实现该方法的装置:中国, 201410148247.8[P].2014-6-25.
中图分类号:U666.14
文献标志码:A
文章编号:2095-8110(2014)03-0052-07
收稿日期:2014–08–07;
修订日期:2014–10–10。
基金项目:总装预研项目(51309030601)
作者简介:伊国兴(1974–),男,副教授,研究方向为导航、制导与控制。E-mail:ygx@hit.edu.cn
Design and Realization of Multi-system Compatible GNSS IF Sampler on MAX2769B
YI Guo-xing,HOU Zhen-huan,WEI Zhen-nan
(Space Control and Inertia Technology Research Center,Harbin Institute of Technology,Harbin 150001,China)
Abstract:GNSS software receiver has features of high algorithm flexibility and convenience for updating.It is now gradually becoming a popular research and experimental platform of satellite navigation.In this paper,contrast and introduction of several GNSS single-chip solutions was made on the perspective of processing multi-band and multi-system. Design and implementation process of a RF collection system based on MAX2769B was also described in detail.For aspects that have close relationship with performance,some reference to proposed design and test methods is proposed. Based on the collection system,measurements of its performance for collecting GPS L1 signal was showed to prove its ability.With the help of solver code of software receiver,the acquisition,tracking,measuring and location results of specific frequency points evaluate the skills of design,including basic and multi-band functions.
Key words:Software receiver;GNSS RF front-end;Multisystem compatibility;Multi frequency;MAX2769B
