
北斗三频RTK定位算法研究
2014-04-19 11:21:00赵乐文叶世榕章太馨
导航定位与授时 2014年3期
关键词:动态
赵乐文,叶世榕,章太馨,袁 兵
(武汉大学卫星导航定位技术研究中心,武汉430079)
北斗三频RTK定位算法研究
赵乐文,叶世榕,章太馨,袁 兵
(武汉大学卫星导航定位技术研究中心,武汉430079)
摘 要:为了评估北斗三频观测值在短基线RTK应用中的定位性能,采用Kalman滤波模型进行动态环境下北斗三频模糊度固定,经实测数据验证,动态环境下北斗三频RTK只需1个历元即可得到固定解,模糊度成功率较GPS双频和BDS双频分别提高了15.0%和14.1%,验证了我国北斗三频信号在短基线RTK定位中的优越性能。
关键词:三频;动态;RTK;Kalman滤波
0 引言
RTK测量技术可以通过双差组合消除接收机钟差、卫星钟差等公共误差以及削弱卫星轨道、对流层延迟、电离层延迟等距离强相关的误差影响,实现厘米级甚至毫米级定位精度,因而得到了广泛应用[1]。
北斗卫星导航系统(BDS)自2012年起正式对中国及其周边区域提供导航定位服务,目前BDS星座包括5颗地球静止轨道卫星(GEO),5颗倾斜地球同步轨道卫星(IGSO)以及4颗中轨卫星(MEO)。国内外学者对BDS单频和双频RTK定位性能进行了一系列研究[2-6],实验结果表明BDS已具备RTK差分定位能力,但精度较GPS稍差[2]。
三频观测值的显著优点是可以形成具有更长波长、更小噪声、更小电离层影响等优良特性的组合观测量,可以大大提高短基线模糊度固定成功率和可靠性[7-8]。北斗系统作为首个发射三频信号并具有区域服务能力的卫星导航系统,其三频载波相位观测值在实现动态模糊度快速固定,缩短初始化时间方面的性能尚未有深入研究。本文研究了基于北斗三频观测值的Kalman滤波模型动态模糊度固定算法,并分别用实测静态数据和动态数据进行测试,测试结果表明,北斗三频RTK解算成功率及精度都优于双频方法,验证了北斗三频在动态应用中的优势。
1 三频模糊度解算数学模型
北斗系统和GPS系统均采用码伪距和载波相位观测相结合的方式进行测量,三频接收机可同时获得B1、B2和B3三个频点上的载波相位观测值,各个频点信息如表1所示:
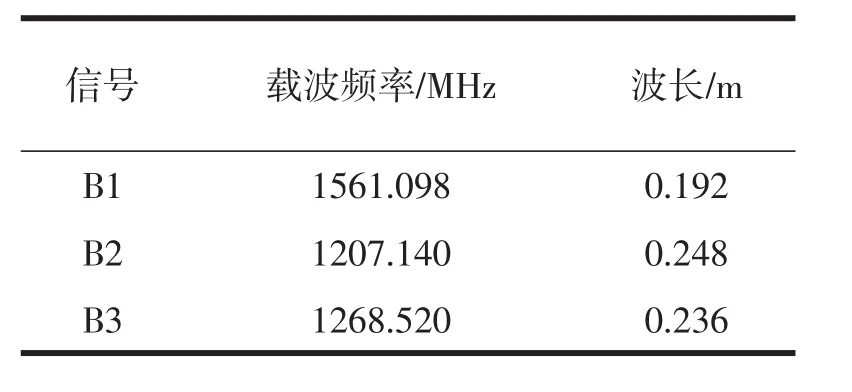
表1 北斗系统信号的载波频率和波长Tab.1 Carrier frequency and wavelength of BDS
基于原始载波相位观测值,可以形成如下组合观测值[7]:

式中Δ是双差标识,Δφi(i=1,2,3)是第i个频点上以米为单位的的载波相位观测值,(i,j,k)为组合系数,ΔΦ(i,j,k)是以米为单位的组合双差载波相位观测值。
组合观测值的波长和模糊度可以表示为:
故组合观测值的观测方程可写为:

其中Δρ为卫星到接收机之间的双差几何距离,λ(i,j,k)是组合观测值的波长,ΔN(i,j,k)是组合观测值的模糊度,εΔφ(i,j,k)为相位组合观测值的观测噪声。
2 北斗三频模糊度固定方法
三频原始载波相位观测值可以形成波长较长的组合观测值,其中超宽巷组合(0,-1,1)和(1,4,-5)的波长分别为4.8m和6.4m,模糊度很容易通过取整固定;而原始载波相位观测值波长较短,容易受到噪声影响;本文采用模糊度固定的宽巷辅助解算原始频点模糊度,大大减弱了伪距噪声的影响,提高了模糊度固定成功率,具体步骤如下:
2.1确定EWL模糊度
由于EWL组合(0,-1,1)具有波长较长、噪声放大系数较小的特性,故其模糊度很容易通过式(5)取整固定:

2.2确定超宽巷组合(1,4,–5)的模糊度
EWL模糊度ΔN(0,-1,1)固定之后,即可将其视为噪声较小的精确伪距观测量来辅助解算另一个超宽巷组合(1,4,-5)的模糊度。利用两个模糊度固定的EWL即可得到两个宽巷模糊度:

2.3确定B1频点模糊度
得到宽巷模糊度ΔN(1,-1,0)和ΔN(1,0,-1)后,即可辅助解算原始频点B1的模糊度,得到B1频点的模糊度浮点解及其协方差矩阵,利用LAMBDA搜索算法即可得到其固定解ΔN1;然后利用两个宽巷模糊度组合即可得到B2和B3频点的整周模糊度ΔN2和ΔN3,固定原始频点模糊度之后,即可获得cm级的基线解算结果。
3 基于Kalman滤波模型的动态解算
Kalman滤波算法的特点是每得到一个新的观测值,滤波器即可对系统状态估计值进行更新,并且所有的历史观测信息都已经包含在当前的状态及其均方误差估值中,特别适用于动态解算。本文采用扩展Kalman滤波(EKF)模型进行参数估计[9],滤波基本观测方程可以表示为:

式中,X(t)和X(t+1)分别表示当前历元和下一历元的状态向量,L(t+1)为观测向量,Φt+1,t是状态转移矩阵,Q为动态噪声,R为系统观测噪声。
其中状态向量可以表示为:

式中,前3个变量是当前历元的位置参数,ΔN是双差模糊度参数。
对于动态系统,状态向量先验估值及其协方差阵、观测噪声和系统噪声的确定都会影响滤波收敛时间。三频观测值可以形成波长很长的超宽巷组合,其模糊度很容易固定,固定两个EWL模糊度后即可对WL观测值模糊度进行定位,定位得到的坐标及协方差阵可以作为Kalman滤波状态向量中位置参数的先验估值和协方差阵的初值;模糊度参数先验估值根据伪距和载波相位观测值计算得到,先验方差采用对角阵。
由于动态噪声Q与接收机所处动态环境有关,解算中一般采用零矩阵。为了更合理体现低高度角卫星的观测值噪声的影响,本文采用改进的正弦函数模型定权[10]:

式中,Ri为第i颗卫星的观测噪声方差,θ为卫星高度角,a、b一般采用经验值,本文中取值a= 5mm,b=5mm,形成双差观测方程时根据协方差传播定律即可得到观测噪声协方差阵R。
4 实验分析
4.1数据处理策略
鉴于动态条件下无法可靠获得每个历元的坐标真值来评定RTK定位精度,本文首先采用静态数据模拟动态进行解算,分析了三种不同模式下的RTK模糊度固定成功率及解算精度,然后通过实测动态数据来评价北斗三频RTK定位性能。
定义模糊度固定成功率为模糊度正确固定的历元数与总历元数之比,静态测试中将单历元解算的模糊度与事先通过后处理手段得到的模糊度真值对比,来判断模糊度是否固定成功;动态测试中通过Ratio检验来判断模糊度是否固定成功,本文采用的Ratio阈值为3.0。
4.2静态模拟动态解算测试
选用2013年10月9日在武汉地区采集基线长度为3km,采样间隔为1s的静态观测数据进行测试,观测时间为GPST 04:00:00~GPST 08:00:00,解算中卫星高度截止角设为10°。
表2统计了三种解算模式在静态环境下的模糊度固定成功率,图1和图2分别是三种解算模式下E、N、U三个方向的RMS统计量及坐标误差序列。
由表3可以看到采用BDS三频进行单历元模糊度固定的成功率较采用GPS双频和BDS双频分别提高了10.4%和5.1%。从图2可以看到,在平面方向,利用北斗系统进行解算的E方向精度较N方向好,主要是由于北斗星座中的5颗GEO卫星使得E方向的卫星分布较好;而在高程方向,北斗双频解算精度较GPS稍差,由图3可知BDS双频在高程方向存在一定的系统性偏差,经分析这主要是由于北斗GEO卫星的多路径影响较大导致的。采用BDS三频解算结果在平面方向精度有明显改善,在E方向和N方向的RMS分别为7.3mm,9.0mm,在高程方向精度与GPS双频解算精度相当,但较BDS双频有了较大提高,说明多频组合有利于改善定位精度。

表2 三种解算模式下的模糊度固定成功率Tab.2 Ambiguity resolution success rate of three different strategies

图1 静态环境三种不同解算模式下的模糊度固定坐标精度统计Fig.1 The precision results of ambiguity fixed coordinates in static mode

图2 静态基线坐标误差(从上至下依次为BDS三频、BDS双频和GPS双频)Fig.2 Coordinate errors in static mode (from top to bottom:BDS triple-frequency,BDS double-frequency,GPS-double-frequency)
4.3动态解算测试
动态测试采用2014年5月30日在武汉市区采集的采样间隔为1s的观测数据,基准站安装在坐标精确已知的楼顶,流动站在车顶,观测时间为GPST 08:32:25-GPST 08:44:36,共664个历元,观测过程中卫星高度截止角设为10°。图3是观测过程中流动站相对于基准站在平面方向的运动轨迹,最远距离为2.2km。

图3 动态测试中流动站相对于基准站的运动轨迹Fig.3 The trajectory of the rover station relative to reference stations
图4是观测时段内北斗和GPS系统可见卫星数的变化情况,由于接收机所处动态环境等因素影响,共视卫星变化比较频繁,有时观测卫星数甚至不足4颗。
表3统计了三种解算模式下的模糊度固定成功率,从中可以看出,采用BDS双频解算的模糊度固定成功率比GPS双频稍好,主要是动态环境下BDS可视卫星变化比较稳定,卫星空间几何构型较好;与静态试验结果一致,采用BDS三频解算的固定成功率优于双频解算模式,GPS双频和BDS双频的固定成功率分别为82.94%和83.86%,而BDS三频模糊度固定成功率达到97.98%,主要是由于采用三频观测值可以使用模糊度固定的超宽巷作为精密伪距,辅助固定宽巷的模糊度,减弱了伪距噪声的影响,提高了宽巷的模糊度固定成功率,进而可以获得较优的动态定位结果。

图4 观测时段内BDS和GPS的可视卫星数变化Fig.4 Visible satellite number of BDS and GPS
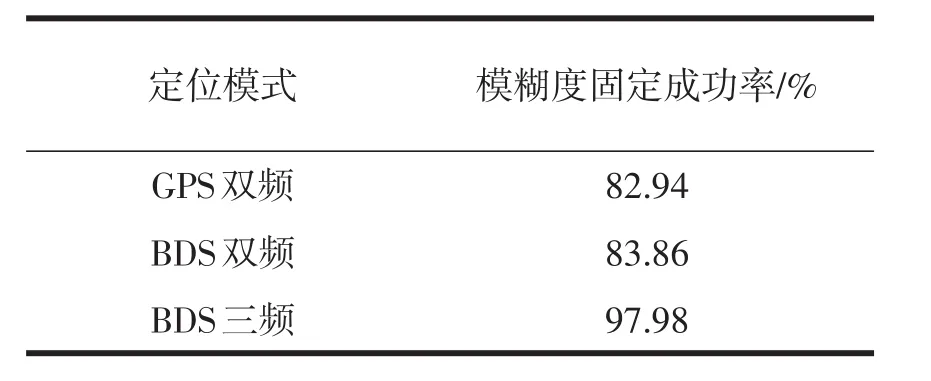
表3 动态环境三种不同解算模式下模糊度固定成功率Tab.3 Ambiguity resolution success rate of three different strategies
为了统计三种模式下获得RTK固定解所需的收敛时间,我们以120个历元为一个观测时段进行解算,结果如表4所示。由表4的统计结果可以看到,BDS三频只需1个历元即可获得RTK固定解,GPS双频和BDS双频分别需要3.5个历元和2.2个历元可以得到固定解。

表4 三种RTK解算模式下收敛时间Tab.4 The convergence time of three mode
5 结论
本文研究了基于北斗三频观测值和Kalman滤波模型的RTK定位算法,并分别采用静态模拟动态和动态数据进行测试。静态模拟动态测试结果表明,基于BDS三频的RTK模糊度固定成功率较GPS双频和BDS双频分别提高了10.4%和5.1%。此外,利用三频观测值解算在平面方向可以获得mm级定位精度,高程方向可以获得和GPS相当的定位精度。动态环境下北斗解算优势更为明显,北斗三频可以达到97.98%的模糊度固定成功率,较GPS双频和BDS双频分别提高了15.0%和14.1%,且随着我国北斗星座布设完善,RTK定位性能有望进一步提升。由于动态RTK受周围环境影响较大,本文只在武汉市区进行短基线测试,其他环境条件下的RTK定位性能,有待进一步研究。
参考文献
[1]魏子卿,葛茂荣.GPS相对定位数学模型[M].北京:测绘出版社,1998.
[2]Haibo He,Jinlong Li,Yuanxi Yang,et al.Performance assessment of single-and dual-frequency BeiDou/GPS single-epoch kinematic positioning[J].GPS Solutions, 2013:1-11.
[3]Teunissen P J G,Odolinski R,Odijk D.Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles[J].Journal of Geodesy,2014,88(4):335-350.
[4]Li J,Yang Y,Xu J,et al.GNSS multi-carrier fast partial ambiguity resolution strategy tested with real BDS/GPS-dual-and triple-frequency observations[J].GPS Solutions,1-9.
[5]Hairong Guo,Jinlong Li et al.Performance of Triple-Frequency High-Precision RTK Positioning with Compass[C]//ChinaSatelliteNavigationConference (CSNC)2013 Proceedings.Springer Berlin Heidelberg, 2013:167-176.
[6]王世进,秘金钟,李得海,祝会忠.GPS/BDS的RTK定位算法研究[J].武汉大学学报:信息科学版,2014, 39(5):621-625.
[7]Yanming Feng.GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals[J].Journal of Geodesy,2008,82(12):847-862.
[8]FORSSELL B,MARTIN-NEIRA M,HARRISZ R A. Carrier phase ambiguity resolution in GNSS-2[C].Proceedings of the 10th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1997).1997:1727-1736.
[9]谢刚.GPS原理与接收机设计[M].电子工业出版社, 2009.
[10]戴吾蛟,丁晓利,朱建军.基于观测值质量指标的GPS观测量随机模型分析[J].武汉大学学报·信息科学版, 2008,33(7):718-722.
中图分类号:P228.41
文献标志码:A
文章编号:2095-8110(2014)03-0047-05
收稿日期:2014–09–15;
修订日期:2014–09–20。
基金项目:国家自然科学基金资助项目(41074008);水利部公益性行业科研专项经费资助项目(201401072)
作者简介:赵乐文(1991–),男,硕士研究生,主要从事GNSS精密数据处理方面研究。E-mail:gnss_zlw@qq.com
Research on RTK Positioning with BDS Triple-frequency Observations
ZHAO Le-wen,YE Shi-rong,ZHANG Tai-xin,YUAN Bing
(Research Center of GNSS,Wuhan University,Wuhan 430079,China)
Abstract:To assess the positioning performance of BeiDou triple-frequency observations in short baseline RTK applications,the Kalman filter model is proposed to fix the ambiguity of triple-frequency observations in dynamic environments.The results show that the fixed solution can be obtained by single epoch,and the ambiguity reliability is improved by 15.0%and 14.1%compared with that the GPS and BDS dual-frequency observations.
Key words:Triple-frequency;Dynamic;RTK;Kalman filter
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
环球慈善(2019年6期)2019-09-25 09:06:24
科学中国人(2018年8期)2018-07-23 02:26:24
科学中国人(2018年1期)2018-06-08 05:42:37
