大量程高精度光纤陀螺的设计与实现
2014-04-19 11:21袁慧铮陆俊清李星善邵志浩葛仲浩
导航定位与授时 2014年3期
袁慧铮,陆俊清,李星善,邵志浩,葛仲浩,高 博
(湖北航天技术研究院总体设计所,武汉430040)
大量程高精度光纤陀螺的设计与实现
袁慧铮,陆俊清,李星善,邵志浩,葛仲浩,高 博
(湖北航天技术研究院总体设计所,武汉430040)
摘要:采用增强Sagnac效应的方式提高干涉式光纤陀螺精度时,往往会减小陀螺的量程。从理论角度分析了高精度光纤陀螺实现量程扩展的可能性,完成了相关的算法设计,实现了跨条纹工作的平滑过渡,搭建了实验平台,成功将高精度光纤陀螺的量程从Ω-π~Ω-π扩展到 Ω-7π~Ω7π。通过对量程扩展前后陀螺标度因数、零偏稳定性等参数的对比,得到了陀螺在量程扩展后不影响其基本参数的结论,进一步验证了高精度光纤陀螺的大量程设计的正确性和可靠性。
关键词:高精度;光纤陀螺;量程;跨条纹
0 引言
光纤陀螺是一种全固态角速度传感器,与传统的机械陀螺在原理上有本质的不同。它不是基于高速转动刚体的定轴性和进动性原理,而是基于闭合光路中的Sagnac效应,采用无转动部件的光纤环,省去了复杂的伺服控制机构,具有体积小、功耗低、寿命长、动态范围大、响应速度快、抗振动冲击等突出优点[1-3],自问世以来备受瞩目。经过近40年来的发展,已经广泛应用于飞机、舰船、装甲车辆、石油测井等领域,并继续向更高精度、更小尺寸的方向快速发展[4-6]。
Sagnac效应的数学表达式如式(1)所示:

式中Δϕ为两束相反方向传输的光所产生的相位差,L为光纤长度,D为光纤环直径,λ0为光纤陀螺的工作波长,c0为真空中的光速,Ω为光纤环体的转动角速率。
由式(1)可知,为提高探测信号的信噪比,可通过增大单位角速率条件下的相位差来实现。在工程实践中,最常用的方法是直接增大光纤环直径D或增加光纤长度L。但同时带来了另外一个问题,即光纤陀螺的量程缩小。光纤陀螺的单条纹量程可用式(2)来表示:

下面给出一个数量级的例证。当工作波长为1310nm,光纤长度为2000m,等效直径为13cm时,其单条纹量程Ωπ为43.3(°)/s。对于高机动条件下的舰船、车辆和飞行器而言,该量程是无法满足要求的。因此,必须考虑扩展其敏感区间,采用跨条纹工作方式增大陀螺的量程。
1 光纤陀螺跨条纹工作的数学模型
Sagnac干涉仪与其他类型的两波干涉仪类似,其响应为余弦型[1],光强可由式(3)给出:

采用方波调制,方波调制的频率 f=1/2τ,式中τ为光在光纤环中传播一周所经历的时间,方波信号正半周与负半周两种调制态之差为:
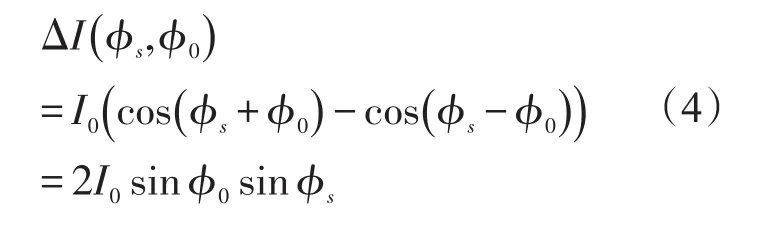
采用开环方案时,当 ϕs较小时,存在sinϕs≈ϕs;ϕs较大时,就不能进行这种近似。为了消除大角速率条件下sinϕs的非线性,采用全数字闭环方案的光纤陀螺,根据测量到的ϕs,生成了一个与ϕs大小相等、符号相反的反馈相位ϕFB施加到集成光学调制器上,因此式(4)可写成:

这样就使得ϕs-ϕFB的值始终处于小相位,保证了sin(ϕs-ϕFB)≈ϕs-ϕFB在大角速率条件下依然成立。因此,对于工程可实现的闭环干涉式光纤陀螺而言,其实际角速率输出是ϕs-ϕFB的积分值。当输入角速率时,其中Ωπ为ϕs=π时的输入角速率,陀螺输出的角速率值与ϕs的符号保持一致,且存在如下的关系:

由于实际检测到的光功率满足式(5)所示的条件,存在sin(ϕs-ϕFB)的关系而非ϕs-ϕFB。正弦函数的特点导致当时,式(6)不再成立,sinϕs-ϕs的曲线如图1所示。

图1 sinϕs–ϕs的曲线变化图Fig.1 The relationship betweensinϕsandϕs
从式(6)可知,当-π<ϕs<0时,sinϕs为负值,陀螺的输出角速率同样也为负值;当
0<ϕs<π时,sinϕs为正值,陀螺的输出角速率 同 样 也 为 正 值 ; 当π<ϕs<3π时 ,sinϕs=sin(ϕs-2π),如果此时未对陀螺的量程进行扩展,则此时陀螺的输出值与相位为ϕs-2π时的输出值相同。以此类推,随着Sagnac效应引起的ϕs增大,陀螺在每越过一个Sagnac效应为2π的量程时,必然导致输出角速率的符号倒向。如果未进行陀螺的量程扩展,根据正弦函数的周期性特征,sinϕs-ϕs和Ωg-ϕs的具体变化情况如图2所示。

图2 未进行量程扩展时陀螺角速率Ωg与sinϕs的对应关系Fig.2 The relationship between FOG outputΩgandsinϕswithout range extended
因此,实现高精度陀螺的大量程扩展的方式如式(7)所示。

式中,n为正整数,对应着扩展的条纹级数,单条纹区间定义为n=0级条纹。经量程扩展后,光纤陀螺在跨条纹工作时,实际输出应如图3所示。

图3 进行量程扩展后陀螺角速率Ωg与sinϕs的对应关系Fig.3 The relationship between FOG outputΩgandsinϕswith range extended
2 实验平台设计及测试结果
2.1实验平台设计
实验平台的搭建遵循以下原则:
1)尽可能采用通用器件;
2)选择波长较短的光源,如波长为1310nm的SLD;
3)制作等效直径足够大、光纤足够长的光纤环,典型的如直径120mm以上,光纤长度1500m以上;
因此,实验平台采用1310nm的SLD光源,保偏光纤耦合器,Y波导、PIN-FET和等效直径为150mm、光纤长度为2000m的光纤环。根据式(2),可计算陀螺的单条纹量程为:

实际搭建的实验平台原理框图如图4所示。

图4 实验平台陀螺功能框图Fig.4 The block diagram of the FOG for experiment
2.2实验方法
2.2.1量程验证实验
量程验证实验主要在单轴速率转台上完成。将陀螺固定在速率转台上,以100(°)/s2的加速度将陀螺从静止状态加速到240(°)/s,保持若干秒后以同样的加速度将陀螺减速至静止状态,然后以同样的加速度反向加速,达到-240(°)/s后保持若干秒,同样的,以100(°)/s2的加速度将陀螺减速至静止状态。

图5 转台角速率曲线Fig.5 The output of the calibration platform
2.2.2标度因数测试实验
为考核量程扩展后陀螺的标度因数变化情况,将陀螺标度因数的测试分为如表1所示的情况分别进行。
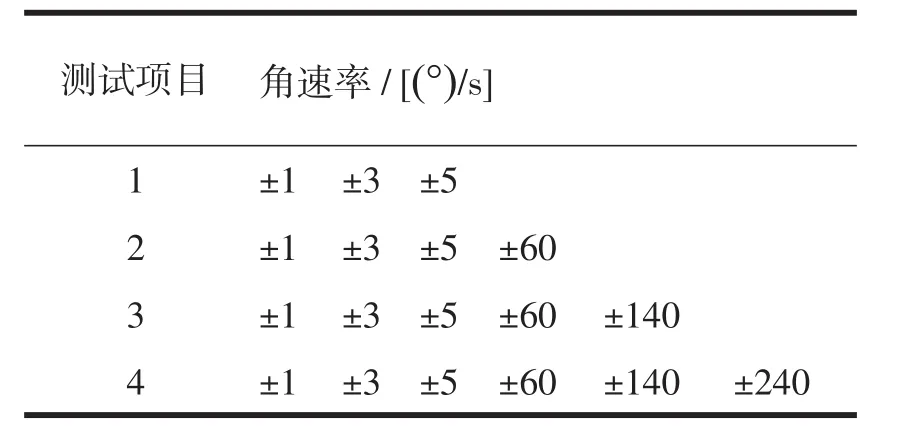
表1 标度因数测试方法Tab.1 The test method of scale factor
2.2.3零偏稳定性测试实验
为考核量程扩展后陀螺的零偏稳定性变化情况,对陀螺量程扩展前后零偏分别进行3次测量。具体测量方法是,将陀螺输入轴正方向垂直向下放在有基准面的大理石平台上,采集陀螺的输出Oi,共采集N秒的数据,去掉上电后前(N1-1)秒不稳定的数据,按照式(8)的方式计算陀螺的零偏D0。

式中E为陀螺的标度因数,单位为^/";ωe为地球自转角速率,单位为(°)/h;θ为当地地理纬度,单位为(°)。
3 实验结果及分析
由于实验中的操作误差,达到预设角速率后的保持时间未能与预设时间一致,但不影响测试结果的可靠性。未进行量程扩展时,实验结果如图6所示。
从图6可以看出,随着转台角速率的增加,陀螺的输出在角速率为Ωπ、Ω3π和Ω5π处发生符号倒向,由此引起本应随着转台角速率单调增加的陀螺输出异常。从测试结果可以看出,陀螺的单条纹量程Ωπ=37.22(°)/s和Ω-π=-37.36(°)/s,与其理论计算结果非常相近,但两者又不完全相同。仔细观察分析陀螺在Ωπ和Ω-π处的值,由于陀螺信号解调过程中非互易性误差的存在,造成陀螺存在固定零偏。采用如式(7)所示的量程扩展方法对陀螺解调算法进行修正,得到如图7所示结果。

图7 进行量程扩展后陀螺的输出Fig.7 The output of FOG with range extended
从图7可知,陀螺经量程扩展后,能够很好的响应外界角速率输入。由于输入角速率高达240(°)/s,已超过陀螺Ω6π的量程,因此,陀螺内部实际上完成了7级条纹扩展。
量程扩展后的陀螺进行了4次标度因数测试,实验结果如表1所示。陀螺在扩展量程前后分别进行了3次零偏稳定性测试,实验结果如表2所示。从标度因数和零偏稳定性的测试结果来看,扩展量程后陀螺的标度因数没有产生明显的劣化,与单条纹量程时的精度保持一致。

表2 标度因数测试结果Tab.2 The test results of scale factor

表3 零偏稳定性测试结果Tab.3 The test results of bias stability
4 结论
从干涉型光纤陀螺闭环解调的原理出发,理论分析了输入角速率超出陀螺单条纹最大量程时的输出情况,设计了陀螺跨条纹工作的算法,搭建了实验平台,实现了高精度光纤陀螺量程由Ω-π~Ω-π到Ω-7π~Ω7π的扩展,实验测试结果与理论分析吻合。通过设计良好的边缘检测算法,实现了跨条纹输出的平滑过渡。进行跨条纹量程扩展后,陀螺标度因数的非线性度、不对称性与单条纹工作时相当,零偏稳定性也无明显变化。因此,本方案在不增加器件、不改变光路结构的条件下实现了高精度陀螺的量程扩展,为高精度陀螺在高动态环境中的应用开辟了广阔空间。
高精度光纤陀螺在工程应用中,其量程扩展还存在一定的限制,如为保证陀螺的跨条纹解调算法正常工作,必须设定陀螺的启动速率范围;由于噪声的影响,在一定条件下,可能会造成跨条纹解调算法的异常跳动,造成输出异常;陀螺所敏感的角加速度也要根据陀螺的单条纹量程提前给定,否则也会造成跨条纹解调算法的失调。
参考文献
[1]王巍,张桂才,蔡田.高精度光纤陀螺技术的研究发展途径[C].惯性技术发展动态发展方向研讨会文集,2003:52-56.
[2]宋凝芳,张春熹,朱奎宝.高精度光纤陀螺捷联系统设计[J].北京航空航天大学学报,2006:1380-1384.
[3]Kevin Killian.FOG for aiming[J].Journal of INS&Instrument.1996:5-10.
[4]Herve C.Lefevre,张桂才,等,译.光纤陀螺仪[M].国防工业出版社.2002.1.
[5]Michelson A A,H G Gale.Journal of Astrophysics.Vol. 61,1925,401.
[6]Rosenthal A H.Regenerative Circulatory Multiple BeamInterferometry for the Study of Light Propagation Effects[J].J.O.S.A.,Vol.52,1962,1143-1148.
中图分类号:U241.5
文献标志码:A
文章编号:2095-8110(2014)03-0059-04
收稿日期:2014–05–22;
修订日期:2014–07–20。
作者简介:袁慧铮(1986–),男,硕士,工程师,主要从事光纤惯导及FPGA设计方面的研究。E-mail:huizhengyuan@163.com
Design and Implementation of High Precision I-FOG with Wide Dynamic Range
YUAN Hui-zheng,LU Jun-qing,LI Xing-shan,SHAO Zhi-hao,GE Zhong-hao,GAO Bo
(The 9thDesigning of ChinaAerospace Science Industry Crop,Wuhan 430040,China)
Abstract:An ideal way to achieve high precision of I-FOG is to enhance Sagnac effect.Lengthing the fiber and enlarging the diameter of fiber coil are the major two methods.However,they bring sharp decrease on the dynamic range of IFOG.An algorithm attempting to make the I-FOG work on higher interference fringe is presented and designed.The experiment platform to verify the algorithm is also established.Experiment results show that the dynamic range of I-FOG is successfully enlarged from Ω-π~Ω-πtoΩ-7π~Ω7π.The bias and scalar factor tests show that the dynamic-range-extended I-FOG is at the same precision as the original I-FOG,which give a further evidence to prove the correctness and reliability of the dynamic-range-extended algorithm.
Key words:High precision;Fiber optic gyro;Dynamic range;Crossing the interference fringe
猜你喜欢
科学家(2022年3期)2022-04-11
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年9期)2017-12-18
中国核电(2017年1期)2017-05-17
电子制作(2016年21期)2016-05-17