海洋环境腐蚀模拟试验装置的优化设计与研制
2014-04-14 03:05王受和黄海军张晓东
环境技术 2014年1期
王受和,江 鲁,王 俊,黄海军,张晓东,陈 川
(中国电器科学研究院有限公司工业产品环境适应性国家重点实验室,广州 510663)
海洋环境腐蚀模拟试验装置的优化设计与研制
王受和,江 鲁,王 俊,黄海军,张晓东,陈 川
(中国电器科学研究院有限公司工业产品环境适应性国家重点实验室,广州 510663)
本文介绍了基于GB/T 19746—2005/ISO 11130: 1999等材料腐蚀性能试验标准的试验装置设计要求以及试验装置的主要组成。重点是添加了温度控制系统,优化了潮差控制系统,模拟了海洋波浪。本试验装置是一种结构简单、能够较真实模拟海洋环境腐蚀的试验装置。该试验装置研制成功,为研究海洋用材料的腐蚀行为与机理提供重要的技术设备支持。
海洋环境;腐蚀;试验装置;温度控制;波浪;潮差;优化设计;研制
引言
海洋腐蚀现象明显且严重,一直都是极受关注的问题。据统计,2011年我国GDP为7.43万亿美元,而因为腐蚀造成的经济损失高达2200~3700亿美元,约占全国GDP总值的3%~5%。腐蚀不仅对我国的资源和能源造成了很大的浪费,而且一些钢铁、水泥、混凝土材料的腐蚀也进一步导致相应的码头、船舶、桥梁等发生突发性灾难事件,给人们的生产生活安全带来很大的危害[1]。发展探索海洋环境腐蚀控制的新方法和新技术,研究海洋用材料的腐蚀行为机理和腐蚀规律,对于保障海洋设施安全、发展节约型经济、保护海洋环境、促进社会可持续发展具有非常重要的意义。
目前海洋用材料的腐蚀试验主要是在海岸线附近的海洋环境腐蚀试验站进行实海试验的,但是实海挂样取样试验需要耗费大量的人力、物力和财力,并且存在着试验周期长、试验数据离散性大、不便于实时观察和定量测试等缺点。尤其严重的是,在进行试验的过程中常因狂风暴雨、海浪的拍击等恶劣的海洋自然条件,很容易丢失掉试样,造成试验数据不完整,使整个试验因此而失败,前功尽弃。特别是对于内陆研究单位,进行实海现场挂样研究是很不理想的,使得海洋腐蚀相关工作无法进行。
因此,为了克服现有技术存在的问题,更好更方便地研究海洋用材料腐蚀行为与机理,本文介绍了一种新型的海洋环境腐蚀模拟试验装置。该装置可以在室内模拟海洋真实环境,通过温度控制系统、潮差控制系统和波浪控制系统分别较真实地模拟海洋环境中三个主要因素:温度、潮差和波浪。在实验室投样进行试验,实时观察和监测试样腐蚀情况,将外海工作变为室内工作,为海洋腐蚀防护技术提供实验基础和理论依据。
1 装置总体思路和实现方案
1.1 总体思路
本试验装置的设计思想是结构尽可能简单、且可以准确真实地模拟海洋腐蚀环境。在设计的总体思路上,首先需要明确本装置要实现的功能要求,依据功能要求对装置有一个总体轮廓,再分别设计优选各个零部件,整合这些零部件对本装置进行总体布局,最后从整体上优化设计。然后依照优化后的整体布局用solidworks软件对其进行三维设计和运动仿真,检测本装置的可行性与直观性,最后完成整个装置的实物制作。
1.2 实现方案
本装置要准确真实地模拟海洋腐蚀环境,重点模拟海洋环境的三个主要因素:温度、潮差和波浪。针对这三个因素,分别设计了三个控制系统:温度控制系统、潮差控制系统和波浪控制系统。这三个控制系统是本装置的关键所在。
1)温度控制系统
温度控制系统保证试验海水维持在与实际海水相差不大接近的状态。要求是温度低于实际海水温度时,需给试验海水加热。而当达到实际海水温度时,需停止加热。给海水加热需要加热器,测定海水实时温度需要温度传感器,接收温度信息并控制加热器需要温度控制器,所以温度控制系统包括加热器、温度传感器和温度控制器三部分。
2)潮差控制系统
潮差控制系统需控制潮差范围,一般都是用虹吸管改变试验海水液面来实现模拟潮差。这需要进水箱和出水箱,若要节约水资源则要添加水循环系统,这样系统较为复杂。且潮差周期长,流量控制不精确。本装置采用样品上下运动的方式来实现潮差模拟。
3)波浪控制系统
波浪控制系统需要造波,使海水产生波动,模拟海洋波浪。系统包括造波机、传动系统、减速器和电动机四部分。
现在,造波机主要以机械式[2]为主,即通过造波板的机械运动对水体施加扰动而产生波动,形成波浪。常见的有:①摇板式。通过机械驱动使摇板绕固定轴摆动,使池中水产生波动。摇板的摆动幅度控制波高,波长或周期则由摆动的频率来确定。②活塞式。通过连杆驱动设在水糟一端的活塞进行往复运动,使池中水产生波动。波高取决于活塞冲程和速度,波长则取决于往复频率。③冲箱式。造波部件为断面呈特殊形状的柱体,通过该柱体沿垂直水面方向围绕水面作往复运动达到造波的目的。④转桶式。转桶式则是通过设置在水面的圆柱体绕偏心轮旋转使水产生波动[3]。本装置设计采用摇板式。
而现行的造波机有两种传动类型:液压传动和机械传动。由于液压传动中的液压元件制造精度高,价格高,介质是液体,漏油现象很难消除,而且液压传动系统出现故障时不容易追查原因,维修困难。因此选择价格相对较低,性能也可靠的机械传动。本试验装置是在室内进行模拟海洋环境试验的,空间比较有限,这对于传动系统的要求是结构尽可能简单。所以在进行选择减速器的时候必须注意要有比较大的传动比,而执行机构的选择也同样重要,目前在波浪控制系统里通常都是用四杆机构来完成这个目的。因此本试验装置也同样选择四杆机构来作为传动机构。
2 装置的优化设计
2.1 电机的选择
选择电动机的原则有以下几点:
1)依据机械的负载性质和生产工艺,对电动机的起动、制动、反转、调速等要求,合理选择电机的类型。
2)依据负载转矩、转速变化范围和起动频繁程度等要求。考虑电动机的温升限制、过载能力和起动转矩,合理选择电动机的功率,使功率匹配合理,力求安全、可靠、经济。
3)依据使用场所的环境条件,如温度、湿度、灰尘、雨水、瓦斯、腐蚀及易爆气体含量等,考虑必要的保护方式,选择电动机的防护结构型式。
4)依据企业电网的电压标准、频率和对功率因数的要求,确定电动机的电压等级和频率。
5)依据生产机械的最高转速和对电力传动调速系统的要求,以及机械减速的复杂程度,选择电动机的电压等级。
6)选择电动机时,要考虑产品的价格、建设费用和运行费用,力求综合经济效益达到最好,比如在干燥、洁净的场所,应尽量采用“IP23”的电机,因为这种电机的价格约为同容量“IP44”电机的70%,而且制造厂商可以节约材料,而对于连续运转、负载率高的负载,宜采用高效率电机,以求节能和提高综合经济效益。
7)选择电机时,要考虑影响安装、运行和维护的因数,力求安装和检修方便,运行可靠。
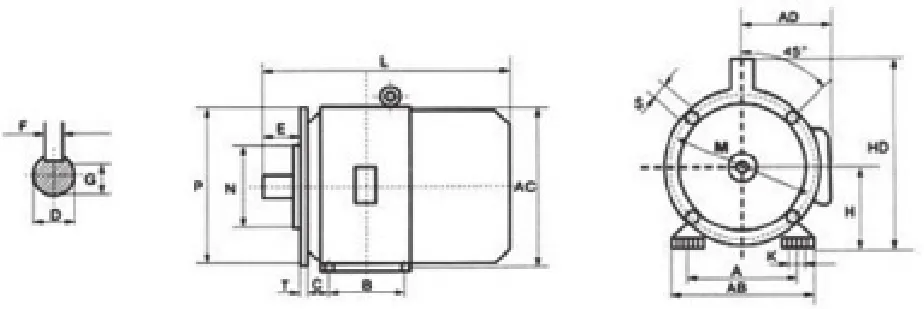
2.1.1 造波电机的选型(图1)
根据实验装置要求及安装环境[4],选择封闭式小型三相异步电机。其结构特点是自扇冷却、封闭性,可以防止灰尘、水滴大量进入电机内部,作一般用途的驱动源。选用功率7.5Kw、转速1500r/min的Y132M型号电动机。
2.1.2 直线电机的选型
本装置试验一片样品约重200g,最大样品量可达72片,则样品最大重量为:

样品架的体积约为0.00223m3,密度为7.98×103Kg/ m3,则样品架重为:

则样品架与样品总重为:

当样品匀速运动时,牵引力F=G=322N
电机功率P=Fv/η=322×0.1÷0.8=40.25W
考虑样品重量变化、样品速度变化和电机启动功率要求等因素,选用功率为104W的MLCE0260-255-00直线电机。
2.1.3 减速器的选型
造波电机的转速为1500r/min较高,摇板造浪的周期是2s,这就需要选用一种传动比比较大的减速器,依据实际情况选用传动比1:40,型号WD53-2-40的蜗轮蜗杆减速器。
2.2 温度控制系统
温度控制系统的功能主要有两个,一个是实时测定显示试验海水的温度,另一个是给海水加热。这个系统包括加热管、温度传感器和温度控制器三部分。其中加热管和温度传感器需要耐海水腐蚀。加热管的选用主要考虑其功率,要满足加热要求,温度传感器主要需要考虑选用类型和精度,温度控制器要满足显示海水温度并控制加热管的功能要求。
2.2.1 加热管功率计算
本试验装置需加热海水体积为V=1m×1m×0.6m = 0.6m3
则海水质量为M=ρV=1×103×0.6Kg=600Kg

式中:C—加热介质的比热容
M—加热介质的质量
ΔT—加热温差
P—加热功率
t—加热时间
海水比热容比水的要小,约为3900J/Kg·℃。
海水温度与内陆温度相差约10℃左右,ΔT=10℃加热时间t=10min。
代入公式计算得出功率:P=39Kw
考虑热量散失等因素取 10Kw
2.2.2 温度传感器的选择
温度传感器有两种类型:热电偶和热电阻。热电偶的测温原理是基于热电效应,其是将两种不同的导体或半导体连接形成闭合回路,当两个接点处的温度不同时,回路中将产生热电势。热电偶的测量范围宽,性能较稳定,同时结构简单,动态响应好,更能够远传4-20mA电信号,便于自动控制和集中控制。热电阻的测温原理是基于导体或半导体的电阻值随着温度的变化而变化的特性。其优点也很多,也可以远传电信号,灵敏度高,稳定性强,互换性以及准确性都比较好,但是需要电源激励,不能够瞬时测量温度的变化。
依据热电偶和热电阻的特性,本装置选用K型热电偶传感器,可以实时测定试验海水的瞬时温度。K型热电偶具有线性度好,灵敏度高,稳定性和均匀性较好,价格便宜等优点。
2.2.3 温度控制器
温度控制器,根据工作环境的温度变化,在开关内部发生物理形变,从而产生某些特殊效应,产生导通或者断开动作的一系列自动控制元件,或者电子原件在不同温度下,工作状态的不同原理给电路提供温度数据,以供电路采集温度数据。
温度传感器测定的试验海水温度实时传送到并显示在温度控制器中,与设定的海水温度进行比较判断,是否需要接通加热管电源,对试验海水进行加热。
依照试验要求可选XMT6000智能型数字显示温度控制器,这种控制器广泛应用于各种工业场合作温度、流量、压力等的自动控制系统。
2.3 潮差控制系统
潮差的实现方式有两种,一种是用虹吸管控制液面高度,另一种是使样品上下运动。本装置是使用第二种方式,通过采用滑轮变向,直线电机驱动来实现样品上下控制运动,实现潮差的模拟。
样品运动要求是上下直线往复运动,试验箱上方装有滑轮架,定滑轮装在滑轮架上,钢丝绳绕过定滑轮进行变向,钢丝绳一端连接在样品架上,另一端连接在直线电机上,电机驱动钢丝绳使得吊挂在样品架上的样品上下移动,有效地模拟海洋潮差状态,同时,通过调节直线电机的周期和行程可以分别模拟涨潮、落潮周期和潮差,此外,还可将样品架提升到试验箱的上方,方便人工取样和放样。
直线电机特点:
1)传递效率高。采用直线电机来驱动传动装置,不需要使用任何转换装置而是直接产生推动力,省去了中间转换机构,简化了系统装置,并且可保证运行的可靠性,易于维护。
2)机械损耗小。直线电机是通过电能直接就产生直线电磁推力的,其在驱动装置中,运动可以做到无机械接触、无传动零部件磨损,这样噪声也小。
3)易于调节和控制。通过调节电源电压或频率,或更换次级材料,就可以得到不同的速度、电磁推力,适用于低速往复运行场合。
2.4 波浪控制系统
2.4.1 波高与摇板摆幅的关系
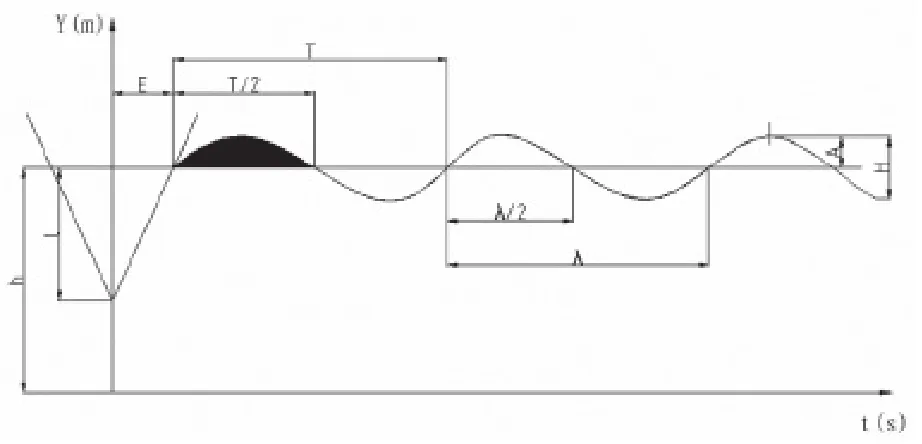
摇板造波理论是建立在微幅波理论的基础上,是微幅波理论在实际应用方面的一个应用。首先假定水是理想流体,不可压缩,波浪是无旋的,可借助势函数ψ(x,y,t)来分析,摇板布置如图2所示,设水深为h;造波板在水面下垂直深度为l;水面处摇幅为E;造波板以摇幅E来运动产生波浪;设波浪高度为A;波长为λ;周期为T。波浪传播方向设为正,X轴与水底部平面重合,Y轴与造波板处的垂直位置重合,且方向向上[5]。如图2所示。
通过计算可得出:

这就是摇板摆幅与波高的关系。
2.4.2 摇板的摆幅和摆角(图3)由几何关系得:
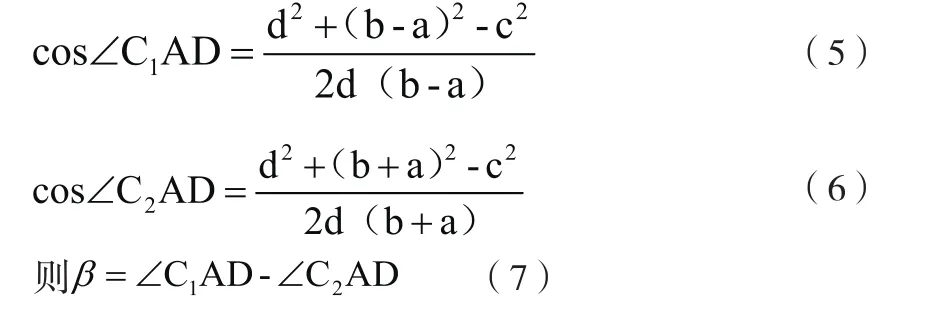
由几何公式

可得出摆幅 C1C2

可计算出摆角θ
在本装置中连杆长度可调,有两种极限位置:

由以上公式计算得出:摆幅 C1C2=460mm,摆角θ=35°
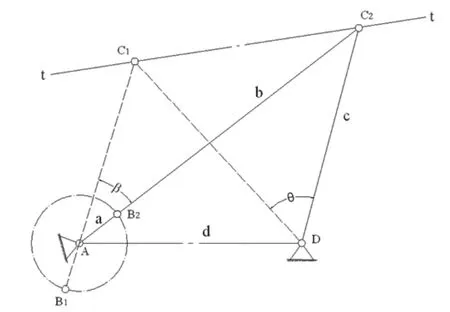
图3 曲柄摇杆机构示意图
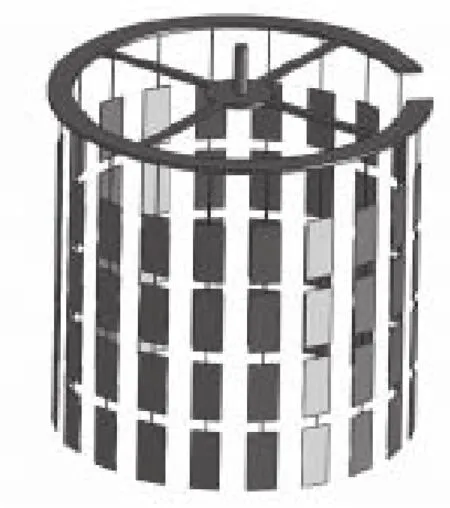
图4 样品架及样品

图5 装置整体造型及剖面图

由以上公式计算得出:摆幅 C1C2=210mm,摆角θ=16°
2.5 样品架的设计
样品架的设计要求是结构简单、使用方便。本装置样品架采用镂空式不锈钢板作为主体框架,这可以减轻样品架的重量又能够满足使用要求。样品作为一个相对独立的整体连接在样品架上,挂样和取样操作方便。样品架及样品连接方式如图4所示。
3 装置总体设计效果
对海洋模拟试验装置各部件优化后所形成的整体效果,借助solidworks等三维机械设计软件完成对装置的整体造型,具体见图5。
4 结束语
海洋腐蚀防护工作任重而道远,防腐技术面临快速发展机遇的同时,也面临着挑战。本文对海洋环境模拟腐蚀试验装置进行优化设计和研制,为研究海洋用材料腐蚀行为与机理提供可靠、简单并能真实模拟海洋环境的设备。
通过海洋环境模拟试验装置,室内模拟试验研究,分析各种材料海洋腐蚀的过程与腐蚀损伤机理,并建立各种海洋环境模拟试验方法,了解各种因素对于材料腐蚀的影响,测试材料的耐海水腐蚀性能,可分析并评价防腐蚀措施的有效性与可行性,取得实验室模拟海洋环境腐蚀试验的结果与实海环境腐蚀试验结果之间的相关性,进一步实现材料腐蚀性能的预测。
为了更精确地模拟海洋腐蚀环境,获得更准确的海水腐蚀试验数据,应积极探索海洋环境腐蚀试验新方法、新技术,研制新设备。
[1]焦淑菲,尹艳镇,梁金禄,史忠丰,蔡成翔.海洋环境中的钢铁腐蚀模拟研究[J].化工技术与开发, 2013(8):48~50.
[2]叶春生,孙赞盈,彭红,等.机械式造波机的机构设计及其运动性能分析[J].人民黄河,2007,29(5): 56~57.
[3]施勤龙,赵晓栋,周枫,谢亚胜,胡亚运,陈辉.一种改进的海洋腐蚀模拟试验装置的设计[J].科学时代,2010(7): 59~60.
[4]叶春生,龚煌,孙赞盈,姜乃迁.摇板式造波机系统交流电机额定功率的选取[J].人民黄河,2011(1):121~122.
[5]蒋颉.主动吸波式造波机造波原理研究[D].哈尔滨工程大学, 2009:9~14.
Development and Optimization of the Simulation Test Device for Corrosion in Marine Environment
WANG Shou-he,JIANG Lu,WANG Jun,HUANG Hai-jun,ZHANG Xiao-dong,CHEN Chuan
(State Key Laboratory of Environmental Adaptability for Industrial Products, China Electric Apparatus Research Institute Co., Ltd, Guangzhou 510663)
This paper introduces the design of the simulation test device for corrosion in marine environment based on the corrosive standards for material such as GB/T 19746—2005/ISO 11130: 1999 and the main composition. The focus is to add a temperature control system, optimize tidal range control system, simulate the ocean waves. The test device has the advantages of simple structure and making a real simulated environment of marine corrosion. Successful development of the test device provides important technical support for the study of marine corrosion behavior and mechanism.
marine environment;simulation;test device;temperature control;wave;tidal range;optimize;development
TG174.3+7
A
1004-7204(2014)01-0055-05
王受和(1990-),男,江西,学士,助理工程师,从事工业产品的环境适应性技术研究。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
海洋科学进展(2020年2期)2020-05-29
当代陕西(2020年24期)2020-02-01
中国特种设备安全(2019年2期)2019-04-22
小哥白尼(趣味科学)(2018年12期)2018-12-18
中国自行车(2018年11期)2018-12-03
中国自行车(2018年9期)2018-10-13
中国农村水利水电(2018年2期)2018-03-21
地球(2015年8期)2015-10-21
云南电力技术(2015年2期)2015-08-23