
考虑履带滑动的转向过程仿真与试验验证
2014-04-09 09:38王红岩王钦龙盖江涛
装甲兵工程学院学报 2014年2期
王红岩, 王钦龙, 芮 强, 盖江涛, 万 丽, 张 芳
(1. 装甲兵工程学院机械工程系,北京 100072; 2. 中国北方车辆研究所,北京 100072;3. 北京特种车辆研究所,北京 100072)
履带车辆的转向是决定其机动性能的关键因素之一,传统转向理论得出的结论无论在转向半径、转向角速度,还是在履带与地面之间的作用力等方面,与实际情况都有较大的差异[1],其主要原因是没有考虑履带与地面之间的滑动。由于忽略了转向过程中履带的滑动,其结果是转向半径要比实际转向半径小约40%,理论转向阻力矩比实际值大50%以上[1-2]。最早研究考虑履带滑动的转向过程的是英国人W.Steeds[3]。前苏联学者对履带车辆转向性能进行了大量的研究[4]。日本的北野昌则[5]、加拿大的J.Y.Wong[6]等对履带车辆的转向过程做了大量的研究工作。国内在这方面的研究工作主要是从20世纪80年代开始的[2,7]。基于以上研究,本文建立了考虑履带滑动条件下的转向模型,并进行了实车试验验证,研究结果表明所建立的转向模型是可信的,可以用于实际工程中的转向参数修正性计算,具有一定的工程应用价值。
1 履带接地压力计算模型
图1为履带车辆转向过程的运动关系及接地压力。设大地坐标系为XOY,车体上的局部坐标系为xoy,车辆的几何中心为坐标原点,CG为车辆质心。

图1 转向过程的运动关系及接地压力
为了便于分析,假设如下:
1) 履带车辆在水平硬地面上作匀速转向运动,履带与地面之间的剪切力与剪切位移相关;
2) 不计履带的沉陷以及履带板在侧向剪切产生的推土效应;
3) 不计履带宽度对履带上的牵引力与制动力的影响,履带不可拉伸;
4) 履带与地面之间的接地压力考虑成连续线性分布的形式。
转向过程的大部分情况是高速侧履带滑转、低速侧履带滑移,这使两侧履带的转向极发生横向偏移,履带的瞬时转向中心如图1中的O′、O″所示,A2、A1分别代表高、低速侧的履带接地段转向极的横向偏移量。
在转向过程中,当车辆的质心出现离心力时,转向极有纵向偏移D,两侧履带的接地压力发生改变,履带接地段的法向负荷为
(1)
两侧履带的接地压力为
(2)
式中:R为转向半径(m);yi(i=1,2)为两侧履带接地段任意点的纵坐标。
2 履带的纵向力、横向力及转向力矩
2.1 履带与地面之间的剪切变形



在大地坐标系下,两侧履带接地段上任意一点(xi,yi)的滑动速度在横向方向上的分量为

在纵向方向上的滑动速度分量为

在两侧履带接地段上任意一点(xi,yi),在XOY坐标系下,履带与地面之间的剪切变形量在X方向上的分量为


(cosφ-1)-yisinφ,i=1,2。
(3)
剪切变形量在Y方向上的分量为

sinφ-L/2+yicosφ,i=1,2。
(4)
履带接地段上任意一点(xi,yi)处的剪切变形为
(5)
2.2 履带的横向力与纵向力计算模型
当履带车辆在硬路面转向时,履带与地面之间的剪切作用力与两者之间的滑移量有关,剪切力可以表示为[7]
τ=pμ(1-e-j/K),
(6)
式中:p为履带与地面之间的正压力;K为土壤的剪切模量;μ为履带与地面之间的摩擦因数,为常量。
履带接地段单位面积上的切向作用力为
dFi=τidA=piμ(1-e-ji/K)dA,i=1,2。
(7)
两侧履带在纵向方向上的作用力为
μ(1-e-ji/K)sinδidy,i=1,2,
(8)
式中:δ1、δ2分别为高、低速侧履带滑动速度与x轴方向的夹角。
两侧履带在横向方向上的作用力为
μ(1-e-ji/K)cosδidy,i=1,2。
(9)
2.3 转向驱动力矩和转向阻力矩计算模型
根据两侧履带的纵向和横向方向的作用力,纵向力对图1中Ov点取矩,可以计算出转向驱动力矩,履带的横向力分别对两侧履带的O2、O1点取矩,可以计算出转向阻力矩。
两侧履带上的转向驱动力矩为
μ(1-e-ji/K)sinδidy,i=1,2。
(10)
两侧履带上的转向阻力矩为
μ(1-e-ji/K)cosδidy,i=1,2。
(11)
履带的滑移角δ1、δ2可根据图1中的运动学关系计算得出:
式中:Vjyi和Vjxi分别为两侧履带在局部坐标系的纵向方向和横向方向上的滑动速度。
2.4 转向的运动方程
根据履带作用力和转矩对局部坐标系的x轴、y轴方向力平衡,以及点Ov的力矩平衡关系,可以得到匀速转向运动方程为
(12)
(13)
(14)
式中:Rf1、Rf2为两侧履带的运动阻力,与两侧履带的法向负荷和道路阻力系数fr有关,即
(15)
在运动方程中,主要未知量是A2、A1和D,当给出车辆结构参数、地面参数以及转向运动学参数时,对以上3个方程进行迭代计算,可以得到各种车速和转向半径所对应的相对转向极偏移量a1、a2、a3,以及履带的作用力、转矩等。
2.5 转向运动学参数的修正系数
由于转向过程中履带的滑动,使得实际转向半径和转向角速度与理论值有较大的差别,为了在实际中准确估算转向参量的变化,需要给出转向半径和转向角速度的修正公式。
在局部坐标系,履带的瞬时转向中心点O′、O″在y轴方向上的速度是履带的理论速度,即

∓B/2+cx∓Ai)=Vi,i=1,2。
(16)
实际的转向角速度和相对转向半径为

在转向过程中,由于履带与地面之间的滑动,实际的转向半径要比理论半径大,而实际转向角速度要比理论值小,即在一般情况下fρ>1,而fφ<1。
3 转向过程仿真与试验验证
3.1 履带滑动率的计算
计算中采用的行驶阻力系数由实车试验测试得到,变化范围为0.049~0.055,取f=0.05;履带与地面之间的摩擦因数μ=0.9;土壤的剪切模量K=0.015 m。
图2(a)、(b)分别给出了两侧履带的滑转率、滑移率随实际转向半径、车速的变化关系曲线。可见:两侧的滑动率都是随着转向半径的增大而减小;对于高速侧履带,车速对滑转率的影响较小;对于低速侧履带,当转向半径小于20 m时,车速对履带的滑移率略有影响。
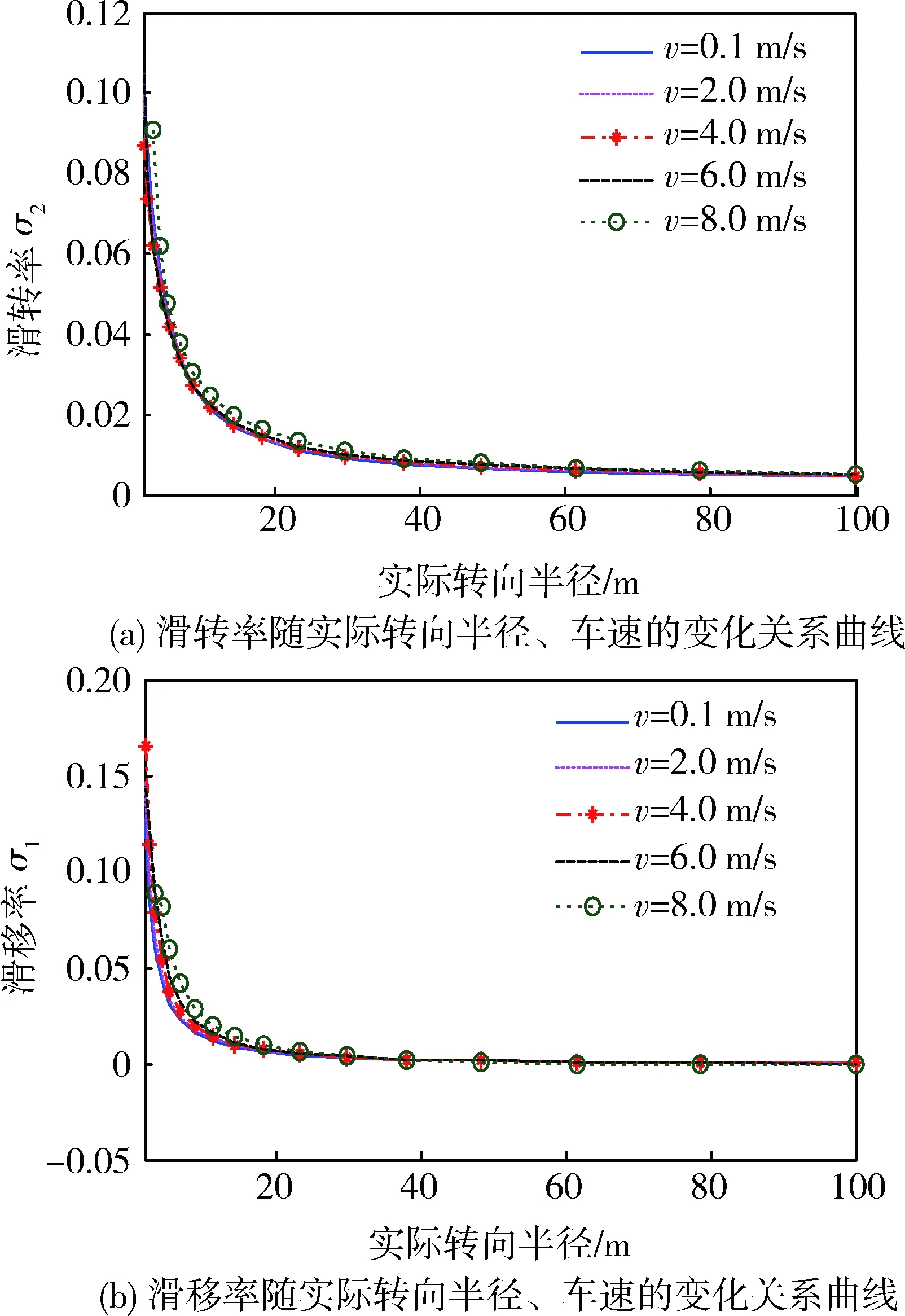
图2 履带滑动率随实际转向半径、车速的变化关系曲线
3.2 履带牵引力、制动力及转向阻力矩的计算
计算得到的两侧履带的牵引力、制动力如图3所示,图中给出了履带牵引力、制动力随车速和转向半径的变化规律,可以看出:两者都是随着转向半径的增大而减小的。由于离心力起到有利于转向的作用,因此,车速较高时,履带的牵引力、制动力要比低速时小。在较小半径范围内,离心力的影响更明显,特别是对低速侧履带的制动力的影响。

图3 牵引力、制动力随转向半径和车速的变化关系曲线
图4给出了转向阻力矩随转向半径和速度的变化关系曲线。可见:随着转向半径的增大,转向阻力矩减小;在转向半径较小情况下,车速对转向阻力矩的影响较明显。

图4 转向阻力矩随转向半径、车速的变化关系曲线
3.3 转向模型的试验验证
为了验证所建转向模型的可信性,笔者进行了实车试验,试验场地为沙土硬地面。试验时,履带车辆变速器挂1挡,工作在液力工况,车辆按顺时针方向连续进行不同半径下的转向试验。试验中同步记录车辆两侧主动轮转速、传动装置输出轴的转速和转矩、车辆的航向角、行驶轨迹、车速等信号。试验测试系统及传感器组成如图5所示。其中,车辆的转向半径、车速以及航向角等参数是由具有二次差分功能、高精度的GPS系统测取的。图6给出了GPS系统测试的车辆运行轨迹所拟合的转向半径图。
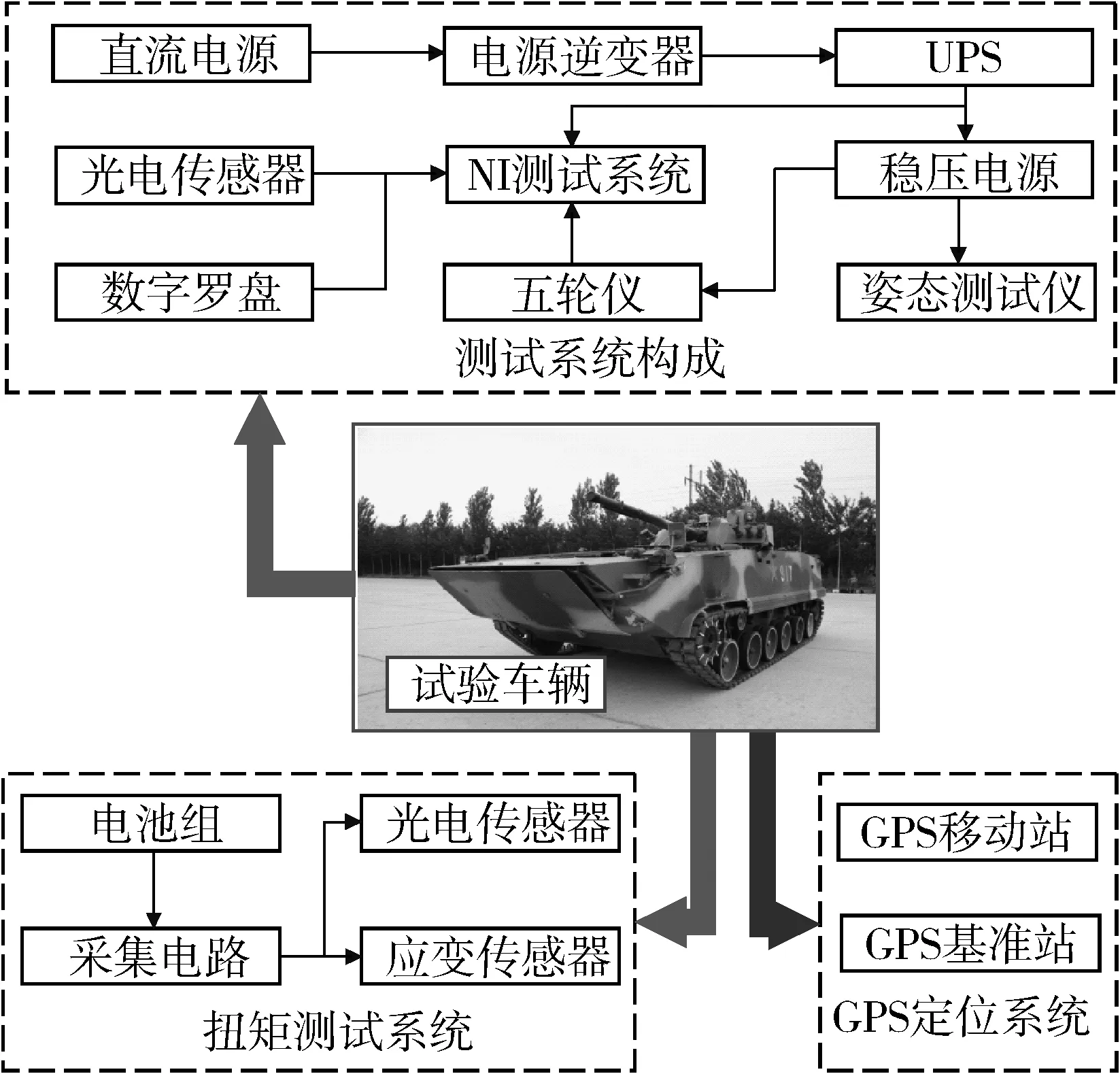
图5 试验测试系统及传感器组成
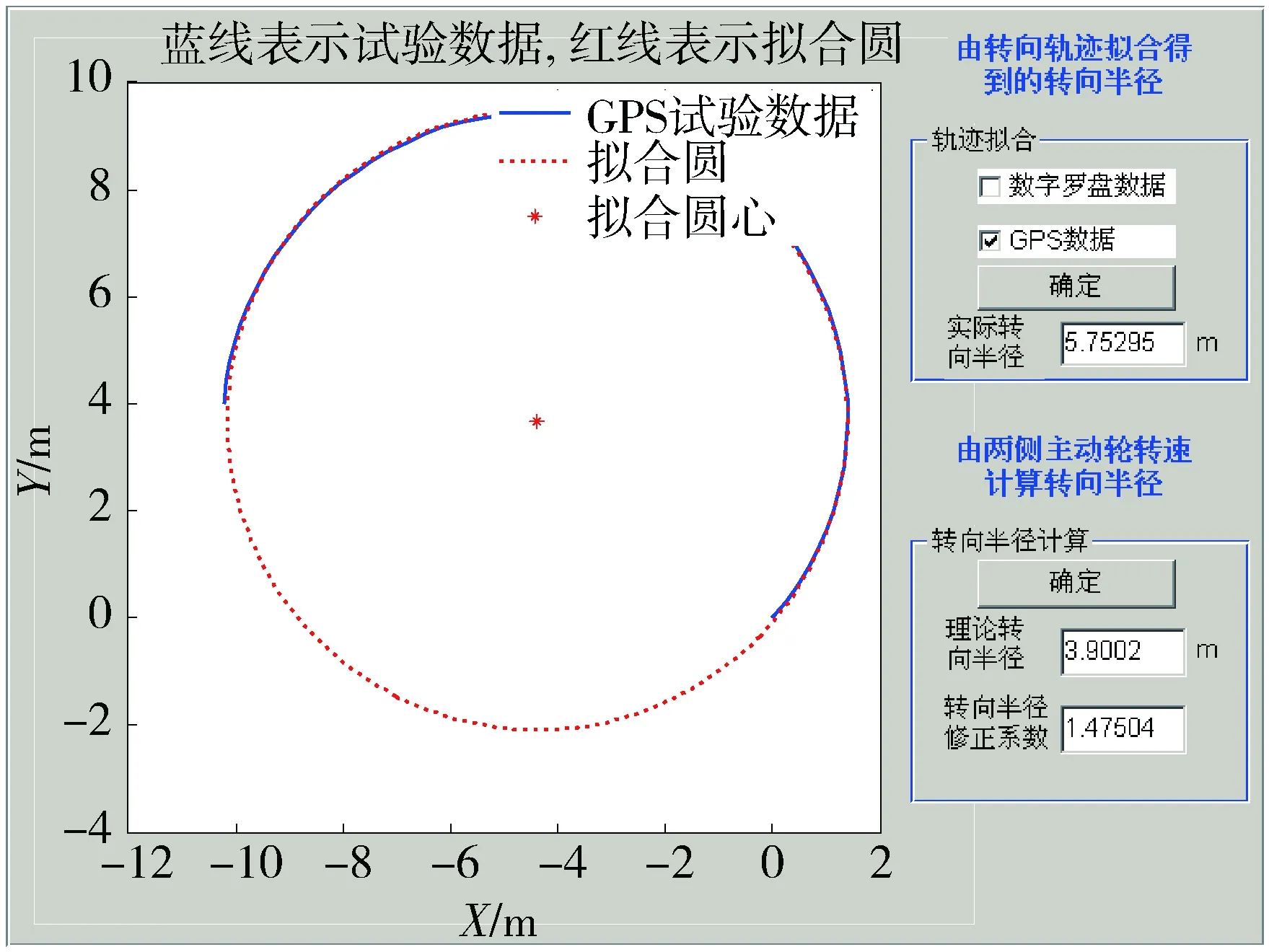
图6 转向轨迹拟合的转向半径
图7-9分别给出了转向半径修正系数、转向角速度修正系数、履带滑动率的计算与试验结果的对比。由图7、8可见:由于履带的滑动,实际的转向半径是理论转向半径的1.5倍左右;履带的滑动使转向角速度有所减小,是理论转向角速度的65%左右;各个半径下的转向半径、转向角速度修正系数的计算结果与试验结果具有良好的一致性。

图7 转向半径修正系数的计算与试验结果对比
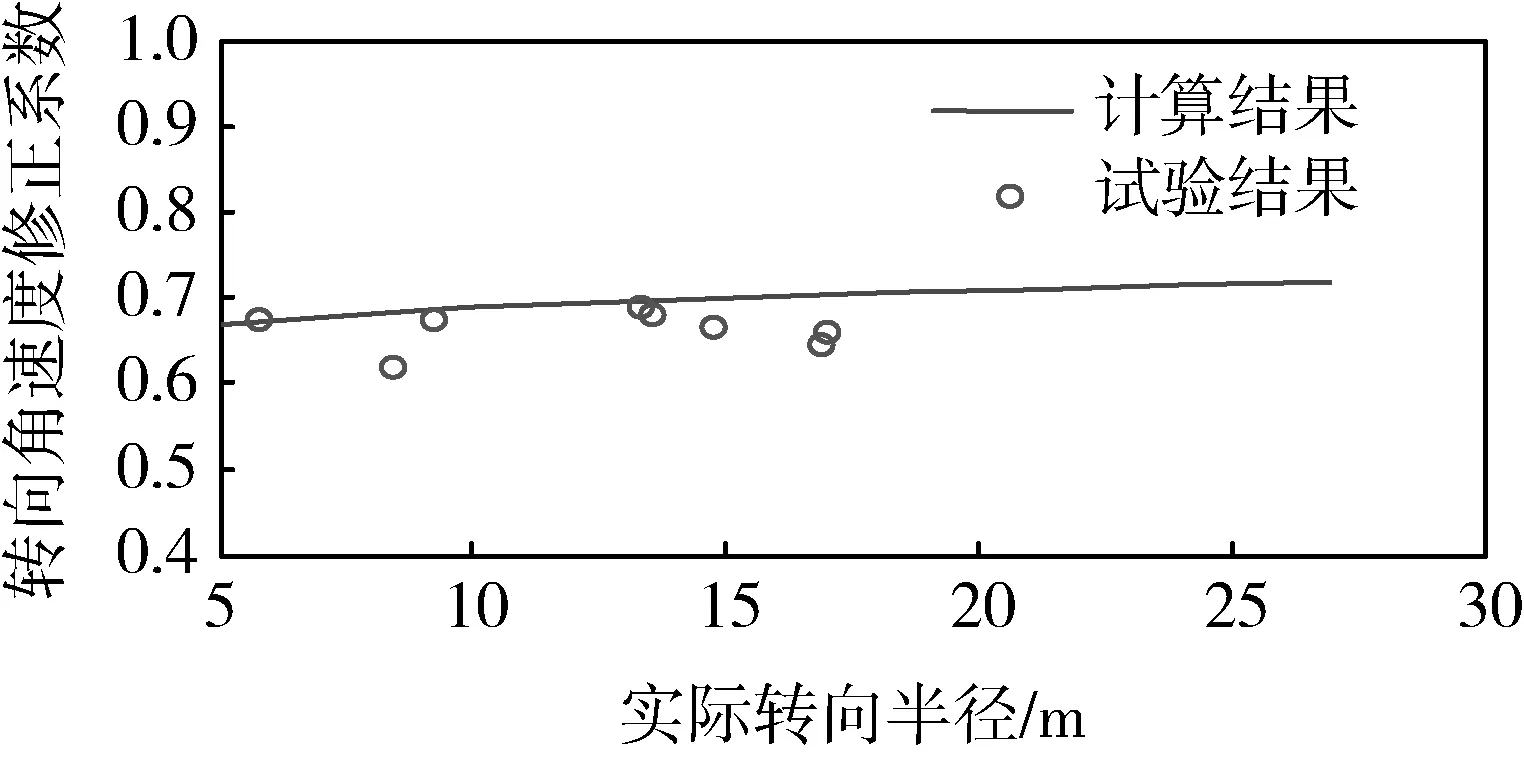
图8 转向角速度修正系数的计算与试验结果对比
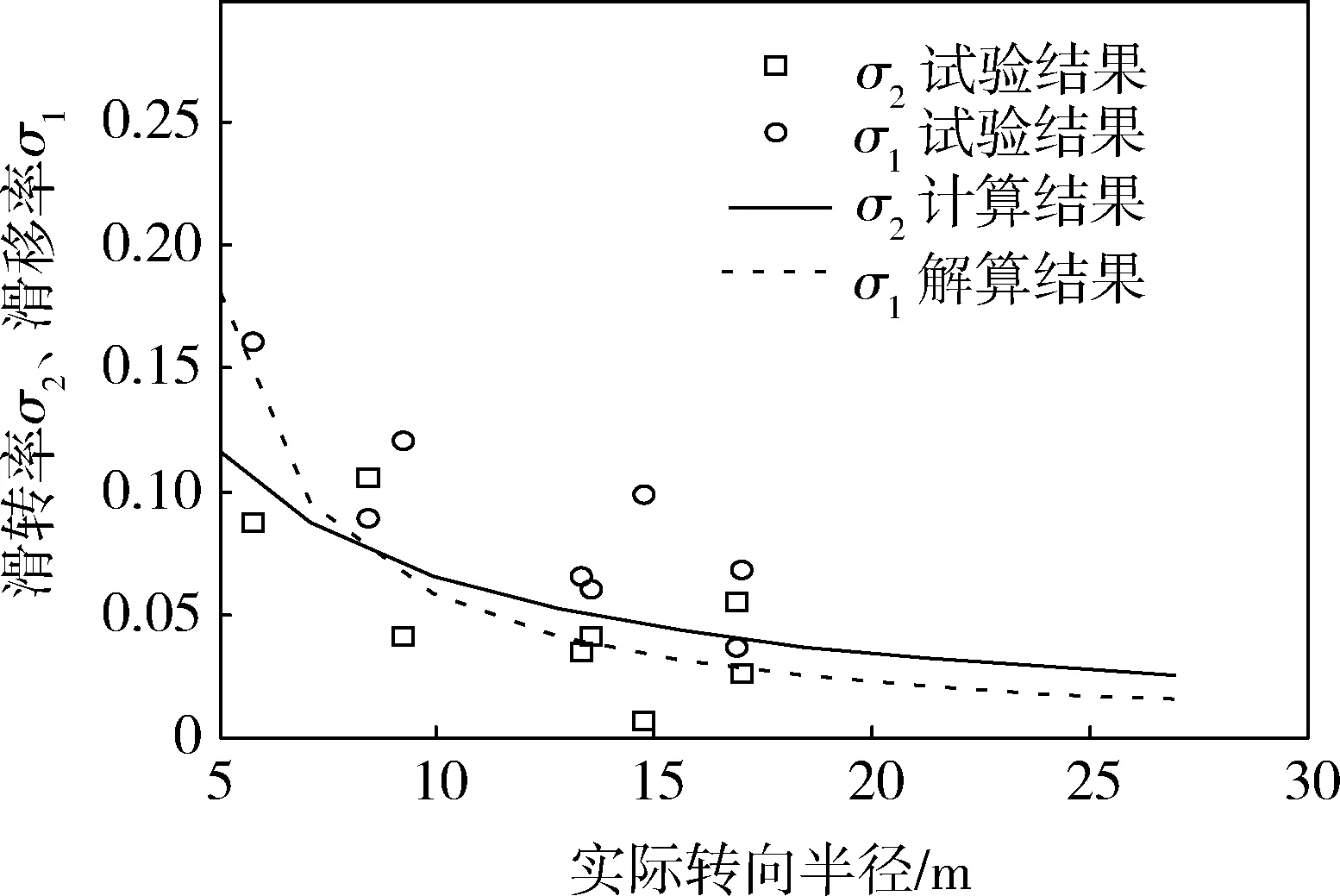
图9 履带滑动率的计算与试验结果对比
由图9可见:两侧履带的滑转率、滑移率的试验结果的分布范围较宽,但是试验结果与计算结果的变化趋势是一致的。
试验时,车速在0.665~1.025 m/s范围内变化,通过对转向轨迹的测量结果的拟合,获得一组转向半径,对应不同转向半径的履带牵引力、制动力的试验结果如图10中各点所示。图中的计算车速为1.0 m/s,从试验结果与计算结果的对比来看,两者的变化趋势和量值一致度均较高。

图10 履带牵引力、制动力的试验与计算结果对比
参考文献:
[1] 程军伟,高连华,王红岩.基于打滑条件下的履带车辆转向分析[J].机械工程学报,2006,42(增刊):192-195.
[2] 程军伟,高连华,王红岩,等.履带车辆转向分析[J].兵工学报, 2007,28(9):1110-1115.
[3] Steeds W.Tracked Vehicles:an Analysis of the Factors Involved in Steering[J].Automobile Engineer,1950,4:143-148.
[4] 汪明德,赵毓芹,祝嘉光.坦克行驶原理[M].北京:国防工业出版社,1983:29-35.
[5] Kitano M,Jyorzaki H.A Theoretical Analysis of Steerability of Tracked Vehicles[J].Journal of Terramechanics,1976,13(4):241-258.
[6] Wong J Y.Theory of Ground Vehicles [M].3rd Edition.New York:John Wiley & Sons Inc,2001:390-420.
[7] 宋海军,李军,安钢,等.履带车辆转向过程仿真与试验研究[J].装甲兵工程学院学报,2005,19(3):17-21.
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
兵器装备工程学报(2021年3期)2021-04-09
中学课程辅导·教师通讯(2018年10期)2018-09-04
科技创新与应用(2017年26期)2017-09-12
中学生数理化·高一版(2017年3期)2017-07-08
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19
科技与创新(2016年6期)2016-04-21
火控雷达技术(2016年1期)2016-02-06
科技视界(2014年6期)2014-12-24
