
油门开度变化对零差速式双流传动转向动态特性的影响
2014-04-09 09:38巩承原金嗣淳
装甲兵工程学院学报 2014年2期
李 军, 巩承原, 张 宇, 金嗣淳
(装甲兵工程学院机械工程系,北京 100072)
高性能双流传动装置是现代军用履带车辆的标志性特征之一,其主要特点是将直驶变速功能和转向功能有机地集成在一起。双流传动之所以被广泛地采用,其中一个主要的原因便是双流传动使车辆具有优良的转向性能。采用双流传动的车辆,其相对转向半径随排挡的提高而变大,且具备中心转向能力,这些特点使得车辆转向的灵活性得到较大的提高,相对于单流传动更加符合车辆的使用要求。
对双流传动液压转向性能的研究一直是众多学者关注的重点问题。游四海等[1]研究表明车辆转向阻力由5种阻力构成,得出了与传统转向阻力分析不同的结论;任京[2]对车辆液压转向过程中功率流的传递、转向半径稳定性等方面进行了系统分析;方遒[3]对双流传动转向期间的自动换挡过程进行了分析;文献[4-9]建立了液压转向调速系统仿真模型,对双流传动液压转向动态特性进行了较为详细的仿真研究以及试验验证。但现有的研究并没有覆盖所有的使用工况,例如没有系统考察转向期间改变发动机油门开度(简称油门变化转向)对转向的影响。在实际使用中,驾驶员经常通过增大发动机油门开度来克服较大的转向负荷或缩短转向时间以实现快速转向,并期望以此来获得更小的转向半径。笔者针对双流传动油门变化转向过程进行了仿真分析和实车试验验证,讨论该操纵方式的有效性。
1 零差速式双流传动转向过程理论分析
履带车辆转向行驶是一个动态过渡过程[10],明确履带上的速度、力和功率关系,是分析履带车辆转向行驶性能的基础。
图1为履带车辆转向示意图。由图1可知:履带车辆转向过程可以简化为平动运动与回转运动的叠加[8]。

图1 履带车辆转向示意图
1.1 相对转向半径
对于变矩器后分流型零差速式双流传动的车辆,其相对转向半径为
(1)
式中:R为转向半径;B为车辆履带中心距;V1、V2分别为内、外侧履带速度;k为汇流行星排的特性参数;ibn为直驶变速机构总传动比;iZ=ipiyiMiL,为转向机构总传动比,其中ip为转向泵前传动比,iy为转向调速系统传动比,iM为马达后传动比,iL为零轴后传动比。
iy为液压泵的转速nP和液压马达的转速nM之比:
式中:VP、VM分别为泵和马达排量;ε为泵的相对变量率,表示轴向斜盘式柱塞泵的斜盘倾斜程度,其值变化范围为-1≤ε≤1;ηyv为转向调速系统容积效率,其值为泵的容积效率与马达容积效率之积。
从以上分析中可以看出:零差速式双流传动履带车辆相对转向半径ρ只与k、ibn和iZ有关,由于k、ip、iM、iL为常数,挡位固定条件下的ibn为定值,因此理论上某挡相对转向半径ρ仅随着iy的变化而连续变化,改变发动机油门开度并不能使相对转向半径发生改变。
1.2 转向角速度
车辆绕其中心O的转向角速度为
式中:ic为侧传动比;rz为主动轮半径;ωj1、ωj2分别为内、外侧行星架角速度,
其中ωf为发动机角速度。于是有
,
(2)
由于式(2)中仅有ωf和iZ两个变量。因此,在转向泵斜盘摆角固定(iZ不变)的情况下,通过增大发动机油门将会使转向角速度变大。
1.3 转向过程两侧履带力
在履带车辆进行大半径区转向时,考虑离心力对负重轮、诱导轮和履带导向齿摩擦的影响。外侧履带的滚动阻力因履带负荷提高而相应增大,而内侧履带滚动则阻力相应减小。考虑转向离心力影响后,两侧履带力分别为
(3)
(4)
式中:fR为滚动阻力系数;G为车重;a为车辆中心的纵向加速度;ε为质量增加系数;J为车辆绕中心O的转动惯量;V为车辆中心速度;μd为转向阻力系数;h为车体重心距离地面的高度。
2 油门变化转向过程仿真分析
在履带车辆转向过程中,人为操纵作用于动力传动系统的信号有4种,分别是油门踏板信号、转向手柄信号、挡位信号及制动信号。下文将对油门变化转向过程进行仿真分析,故设定挡位信号固定,无制动过程。选取2挡液力工况下,慢速调整转向手柄,同时增大发动机油门开度,考察其对转向性能的影响。
仿真输入:发动机油门在0~7 s内逐步增大到开度最大状态;在2 s时转动转向手柄,转向泵在4 s时达到最大输入角度,即2~4 s时,油门开度和转向泵输入共同增加;4~7 s时,转向泵输入恒定,油门输入继续增加。仿真结果如图2-5所示。
由图3-5可知:在发动机油门开度和转向泵输入角度均增大的时间段(2~4 s),转向泵和转向马达的转速均增加,转向调速系统传动比iy随着转向泵输入角度的增加而增加,相对转向半径随之减小;当转向泵达到最大输入角度后(4~10 s),若发动机油门开度继续增大,转向泵和转向马达的转速仍将持续上升,但将保持一定比例,即iy不变,相对转向半径亦无变化。由以上分析可知:在挡位及转向泵操纵摆角均不变的情况下,采取改变油门的方式不能有效控制转向半径,这与理论分析得出的结论一致。

图2 发动机和转向泵输入信号随时间变化曲线
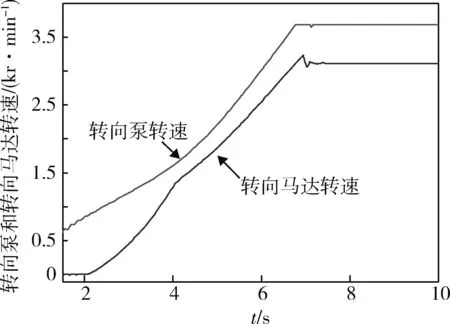
图3 转向泵和转向马达转速随时间变化曲线

图4 转向调速系统传动比iy随时间变化曲线

图5 相对转向半径ρ随时间变化曲线
油门变化转向过程的速度特性仿真结果如图6-9所示。

图6 转向角速度随时间变化曲线

图7 转向角加速度随时间变化曲线
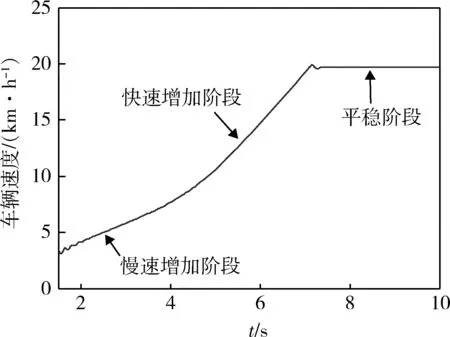
图8 车辆速度随时间变化曲线
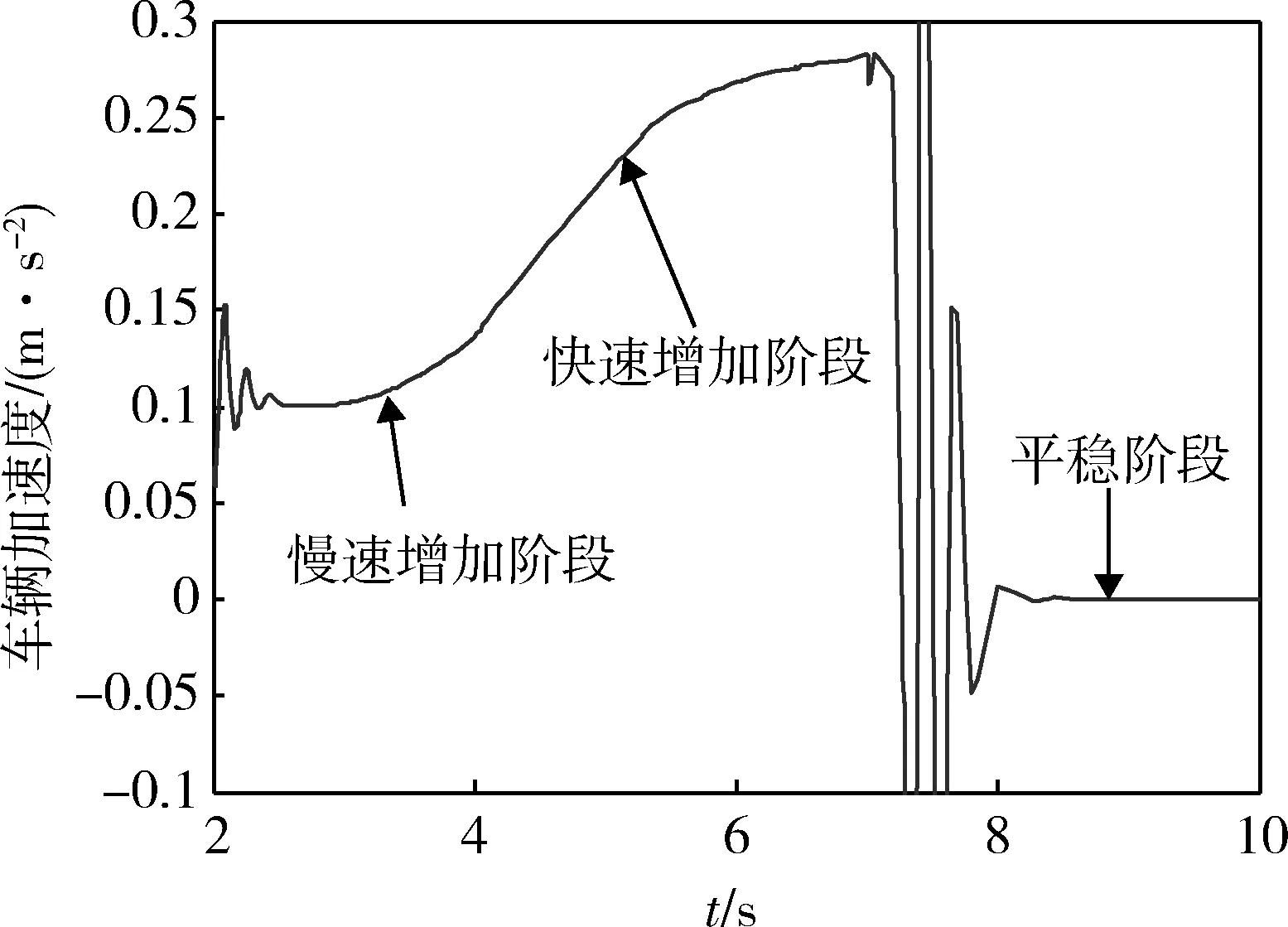
图9 车辆加速度随时间变化曲线
图6-9结果表明车辆速度和转向角速度的变化在车辆转向的全过程中历经了3个阶段:第1阶段(2~4 s)对应油门开度和转向泵输入角度均增加的时期,该阶段转向角速度快速增加,车辆速度缓慢增加;第2阶段(4~7 s)对应转向泵摆角已到达最大位置后油门开度继续增大的时期,该阶段转向角速度缓慢增加,车辆速度快速增加,这与第1阶段相反;第3阶段(7~10 s)车辆进入匀速平稳转向阶段。
对上述现象的解释是:车辆转向运动是平动运动与回转运动的叠加,发动机增加的功率分成2部分,一部分作用于直驶系统,另一部分作用于转向调速系统,由于第1阶段转向泵的输入不断增大,导致发动机增加的功率流入转向系统的总量快速增大,进入第2阶段时转向泵输入已到达最大位置,转向调速系统传动比不再上升,因此相对于第1阶段流入功率增幅放缓,转向角速度也随即进入缓慢增加阶段,而因为功率平衡,此时流入直驶系统的功率增幅将变大,因此车辆速度相较于第1阶段快速增加。
以上分析表明:在满足转向安全条件和地面附着条件的前提下,可以采取提高发动机工作转速的方式获得更高的转向角速度,缩短转向所需时间。
油门变化转向过程两侧主动轮转矩仿真特性如图10所示。由图10可知:在转向过程中,随着油门开度不断增大,主动轮转矩相应地增大;当转向泵达到最大输入角度后,继续增大油门开度,主动轮转矩将快速增加,使车辆可以克服较大的地面阻力,但有可能超过地面附着极限,从而造成外侧履带打滑。

图10 主动轮转矩随时间变化曲线
3 不同油门开度转向性能实车试验
为验证油门开度对转向性能的影响,获得更为有力的数据支持,特针对不同油门开度转向过程进行了实车试验。实车试验采用的测试系统为RACELOGIC 公司研制的VBOXIII车辆实验记录仪(简称VBOXⅢ)。VBOXⅢ基于强大的GPS数据记录系统,通过GPS定位来测量车辆的速度、位移、航向角、轨迹等参数,其采样频率为100 Hz,数据更新速率快,实时性强,数据精度高。试验路面为平坦、开阔水泥路面;试验天气良好,气温适宜,风速较低。由于场地限制,不能进行高挡位的转向试验,试验选取车辆2挡液力工况,在不同油门开度下进行转向。
图11、12分别是发动机在1 200、1 800、2 200 r/min下车辆运动轨迹和速度的对比图。

图11 2挡液力工况不同油门开度下转向轨迹的对比

图12 2挡液力工况不同油门开度下车速的对比
根据图11、12的结果,将试验车辆在不同油门开度下转向行驶一周路程、所需时间、转向半径及转向角速度指标列于表1中。
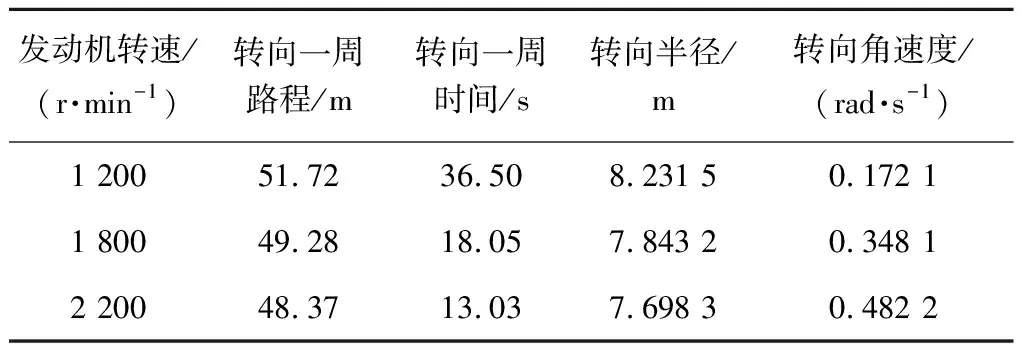
表1 试验各指标数值
由表1可见:实车试验转向角速度比仿真结果(见图6)小。其原因是:试验场地局部路面具有微小坡度,路面条件与仿真中的假定条件有所不同;此外,履带滑转的影响也会使实车试验中的转向角速度变小。
综合实车试验数据可知:在挡位及转向手柄位置不变的条件下,增大发动机油门开度,可以提高转向角速度、缩短转向所需时间,但是并不能显著改变转向半径,如欲继续减小转向半径,必须通过降挡后转向来实现对车辆转向半径的有效控制。试验结果与理论分析及仿真计算基本一致。
4 结论
1)增大发动机油门开度虽可以增大转向泵及转向马达的转速,但不能改变两者比例,亦不能有效调整转向半径。当转向半径降至该挡位下最小半径时,必须通过降挡来实现转向半径的进一步缩小。
2)通过转向期间加大油门提升转向角速度,进而缩短转向所需时间是可行的。但在转向泵到达最大输入角度后,角速度将进入慢速提升阶段,而此时车速提升较快,因此驾驶员可以在满足转向安全条件和地面附着条件的情况下,采取提高发动机工作转速的方式获得更高的转向角速度。
3)在地面附着力足够的条件下,通过增大油门,主动轮转矩将相应地增大,两侧履带力随之增大,便于车辆克服较大的转向阻力,使其在转向条件较差的路面上实现转向。
参考文献:
[1] 游四海,俞宁,李和言,等. 零差速式双流传动履带车辆的转向动态特性[J]. 重庆大学学报, 2008, 31(8):874-880.
[2] 任京. 车辆双流传动液压无级转向动态特性研究[D]. 北京: 北京理工大学, 2001.
[3] 方遒.履带车辆双流传动转向过程自动换挡研究[D].北京:北京理工大学,2001.
[4] 李和言. 综合传动液压转向动态特性与试验方法研究[D]. 北京: 北京理工大学, 2004.
[5] 张宇. 双流传动液压转向动态特性仿真与实车实验研究[D].北京:装甲兵工程学院,2012.
[6] 朱颜,李和言,马彪. 静液驱动技术在高速履带车辆底盘上的应用[J]. 机床与液压,2010,38(6):34-37.
[7] 马彪,李和言,孙宪林,等. 履带车辆液压转向动态特性仿真分析与试验研究[J].设备管理润滑与液压技术, 2004,22(4):184-187.
[8] Bodin A. Development of a Tracked Vehicle to Study the Influence of Vehicle Parameters on Tractive Performance in Soft Terrain [J]. Journal of Terranmechanics, 1999,36(10):2432-2436.
[9] Markel T,Brooker A,Hendricks T,et al.ADVISOR: A System Analysis Tool for Advanced Vehicle Modeling [J]. Journal of Power Sources, 2002,28(4): 223-227.
[10] Merhof W,Hackbarth E M. 履带车辆行驶力学[M]. 韩雪海, 刘侃, 周玉珑,译. 北京:国防工业出版社, 1989:122-123.
猜你喜欢
现代经济信息(2022年22期)2022-11-13
中小学校长(2022年7期)2022-08-19
作文大王·低年级(2022年2期)2022-02-28
兵器装备工程学报(2021年3期)2021-04-09
汽车零部件(2020年7期)2020-08-03
汽车实用技术(2019年9期)2019-05-15
动漫星空(兴趣英语)(2018年9期)2018-10-30
汽车实用技术(2018年15期)2018-08-29
湖南大学学报·自然科学版(2014年2期)2014-12-25
科技视界(2014年6期)2014-12-24
