
基于MEMS传感器的微小型飞行器飞行控制系统
2014-03-26 00:58翟瑞永周兆英张文栋孙其瑞
仪表技术与传感器 2014年12期
翟瑞永,周兆英,张文栋,刘 佳,孙其瑞
(1.太原理工大学微纳系统研究中心,山西太原 030024;2.清华大学精密仪器与机械学系,北京 100084;3.忻州市供电公司调度控制中心,山西忻州 034000)
0 引言
微小型无人飞行器小巧轻便、机动灵活、成本低廉、消耗性强,能携带载荷执行特定任务,无论在军事领域还是在民用领域都是关注热点[1-2]。无人飞行器的自动飞行控制系统是无人飞行器系统的核心子系统,主要负责无人飞行器的方位确定、控制与导航、指令与数据实时传输、按照预定条件完成指定任务等[1-4]。
由于微小型无人飞行器体积小、速度低、带载荷能力差,传统飞行测控系统不再完全适用[5-6]。MEMS传感器因其体积小、价格低、功耗低,在各行各业中得到广泛应用。随着MEMS技术的发展,基于MEMS传感器的微小型自动驾驶仪相应产生。国内外众多研究者对此进行了相关研究。霍尼韦尔实验室的Benjamin和David研发了基于霍尼韦尔惯性测量单元HG1930的飞行导航系统[7];日本千叶大学Farid Kendoul等介绍了一款视觉和惯性单元的组合导航系统,该系统在GPS失效的情况下可以有效估计飞行器姿态,完成起飞、着陆、悬停、目标跟踪等任务[8];清华大学的张福星等设计了基于最少传感器的飞行器测控系统,体积小,质量轻,满足使用要求[9];中国人民解放军92537部队的陶冶等提出一种小型无人飞行器飞行控制方法专利,通过合理搭配和控制设计,适用于小型无人飞行器的预定轨迹自主飞行控制[10]。
文中介绍了一款自主研发的基于MEMS传感器的微小型飞行器飞行控制系统,重点描述了其硬件组成及导航控制算法,并基于现有的微小型固定翼飞行器进行了飞行实验。实验结果表明该飞行控制系统体积小、质量轻,可以控制无人飞行器飞行轨迹平滑连续,飞行姿态稳定,飞行高度误差小,沿轨迹飞行精度高,满足指定要求。
1 硬件组成
采用MEMS器件设计的微小型飞行控制系统,以ARM微处理器LPC2106为核心,外围包括传感器模块、无线传输模块、伺服模块、GPS模块、机载Flash和电源管理模块,其输入为接收机和通讯模块信号的输出,输出则为舵机和电子调速器的输入。传感器模块包括三轴MEMS加速度计、陀螺仪MPU6000、三轴MEMS磁强计HMC5843、绝压传感器MS5611和差压传感器SM5651。传感器信号输出通过数据总线传输到主处理器,进行姿态解算并获知飞行器的状态,数据同时存储在机载数据记录仪AT45DB321以备计算与分析,飞行控制系统通过PWM控制执行机构使飞行器沿设定航线飞行。无线传输模块选用XBee-pro射频模块来实现地面观测站与飞行控制系统的数据连接。其中,陀螺仪输出用来增稳飞行器,姿态模块和GPS模块共同控制飞行器的姿态,绝压传感器感知飞行气压高度,差压传感器得到飞行速度,GPS接收机获得飞行器的航向和位置。硬件结构框图如图1所示。

图1 飞行控制系统框图
2 导航算法
微小型无人飞行器执行飞行任务时,由地面站获取任务航线。航线通常由一系列导航点组成,并定义了在航线上每一点期望的水平位置和高度。水平方向的航迹跟踪由横向回路完成,高度跟踪和空速稳定由纵向回路完成。对于飞翼式的微小型飞行器,执行机构为左升降副翼、右升降副翼和油门。其左右升降副翼的输出量可认为由纵向回路的升降舵输出和横向回路的副翼输出合成而成。导航控制算法总体框图如图2所示。

图2 导航控制算法框图
2.1 纵向控制
纵向控制实际是高度控制。MEMS绝压传感器根据气压值测得飞行器高度信息,经过高度控制器(PID调节器)控制舵机,实现高度保持或变高飞行。MEMS高度计测量的高度差信息输入俯仰角控制系统,用来改变飞行器俯仰倾斜角,控制飞行器升降,直至高度差为零,飞行器达到预定的高度为止。
基本的高度稳定系统控制如下:

(1)
式中:uH为俯仰角控制量;H为当前飞行高度;H0为指定飞行高度;KDH,KPH,KIH为对应控制系数。
高度控制中,难点在于变高控制,由于此时高度误差较大,高度控制与俯仰方向的增稳控制互相耦合,所以依靠单纯的PID控制不够,必须考虑到控制的平稳,进行纵向高度控制时,一般要适当加大俯仰方向的增稳控制系数。
2.2 空速控制
高度控制算法一般可以很好地实现稳定的高度保持控制,但是并不适用大幅度的变高控制。如控制飞行器高度爬升时,会出现爬升缓慢的情况;而控制飞行器高度下降时,则易出现俯冲的情况。单纯的依靠对俯仰角的控制不能稳定地实现飞行器的变高控制,需要配合对油门的控制。
下面通过能量守恒定律分析油门控制过程。将微小型飞行器看作质点,质量为m,设其高度为H,以速度v进行稳定飞行,则其总能量Q为:

(2)
式中:QV为飞行器的动能;QH为势能。
当飞行器爬升时,其势能增加,动能减少,飞行器的速度降低,因此,为了保持同样的动能必须增加飞行器的飞行速度,增大油门。当飞行器高度下降时,其势能减少,动能增加,表现为飞行器的速度增大,为了保持同样的动能必须减小飞行器的飞行速度,需要减小油门。
2.3 横向控制
横向控制采用航线导航控制方法,两个控制量分别为:航向角和航偏距。假设航线设定为从A1到A2,其控制偏差定义如图3中的θ和d,控制的目标就是让二者趋向于0,使微小型飞行器在指定的航线上飞行。
导航控制采用PD控制,同时控制航偏角和航偏距。其控制算法如下:
(3)
式中:uc为期望的滚转角;θ为航偏角;d为航偏距;KPθ,KDθ,ΚPd,KDd为对应的控制系数。
导航控制与高度控制一样,单纯的PID控制不够,必须进行导航策略和特殊情况的判断。对控制量输出进行限幅,保证最大控制舵量处于安全范围之内;航偏角或航偏距中某个误差过大时,需优先进行校正。
3 飞行实验
文中研发了基于MEMS传感器的微小型飞行器飞行控制系统,并在清华大学自主研发的微小型飞行器上进行了试验验证。该飞行控制系统硬件实物结构如图4(a)所示,其大小为6×5×2 cm3,仅重24 g.该系统使用的载体飞行器为TMAV-380型无人飞行器,如图4(b)所示,其采用飞翼式布局,升降舵与副翼合为一体未配置方向舵,翼展为380 mm,总重量约为0.5 kg,使用无刷电机为动力,无线模块用于地面站与飞行器间数据指令传输。控制执行机构为升降左右副翼和油门。试验中微小型飞行器稳定飞行时的飞行速度约为22 m/s.内环的滚转角控制回路带宽为2~3 rad/s,GPS的时间延时约为0.4 s.该飞行实验中导航信息估计模块的输出频率为4Hz.
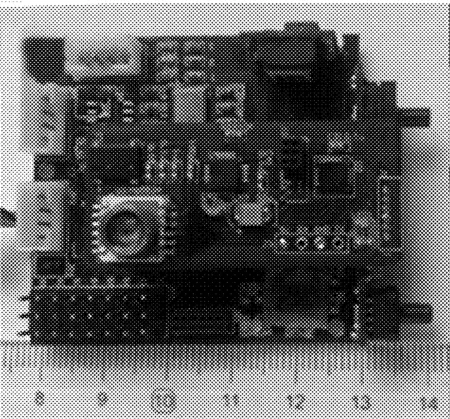
(a) 自动驾驶仪

(b) TMAV-380微小型飞行器图4 自主研发的飞行控制系统
验证试验进行了四航点间逆时针飞行测试,四航点组成一个正方形飞行路线,各航点之间的距离约为150 m,期望飞行高度为90 m,微小型飞行器起飞后自主飞行到目标航路点,并依次通过其余航点重复飞行几次顺利返回。以出发点作为原点,定义当地坐标系,飞行器在该坐标系下的实际飞行轨迹如图5所示,为了检验航迹跟踪系统的性能重复性,飞行器进行了多次往返飞行,由图5可知,在飞行过程中,自动驾驶仪记录的导航信息平滑连续,飞行器飞行过程平稳,重复性良好。航迹跟踪系统有较好的动态特性,几乎没有超调,跟踪误差在30 m以内,航迹跟踪的阻尼特性和稳态误差也可满足任务需求。

图5 飞行实验轨迹图
飞行高度曲线如图6所示,其中短虚线为期望的飞行高度,实线为飞行器实际的飞行高度曲线,采样点的时间间隔为0.25 s,从图6可见高度误差90%以上在±10 m范围,满足对飞行高度的控制要求。
对微小型飞行器航迹跟踪效果的实验研究表明,文中的飞行控制系统方案可以控制微小型飞行器完成航迹跟踪任务,采用这一技术可使飞行器执行任务时飞行平稳,高度稳定误差小,航迹控制精度较高,能够满足日常巡检巡查任务要求。

图6 飞行实验高度曲线图
4 结束语
基于MEMS传感器设计的适用于微小型固定翼无人飞行器的飞行控制系统,采用模块化与高集成度设计,体积小、质量轻,其导航控制算法能够控制无人飞行器在指定空速、高度和横向误差下稳定飞行,并在自主研发的微小型飞行器上进行了实验验证。试验结果表明:该飞行控制系统在控制高度保持和水平航迹跟踪方面,具有较好的动态特性,满足指定的误差指标要求,可以完成微小型飞行器巡检巡查的飞行任务。
参考文献:
[1] LUO Y,CHAO H,DI L,et al.Lateral directional fractional order (PI)α control of a small fixed-wing unmanned aerial vehicles:controller designs and flight tests.IET Control Theory Appl.,2011,5(18):2156-2167.
[2] FU X,ZHOU Z Y,XIONG W,et al.MEMS-based low-cost flight control system for small UAVs.Tsinghua Science and Technology,2008,5(13):614-618.
[3] GALINSKI C,ZBIKOWSKI R.Some problems of micro air vehicles development.Bulletin of the Polish Academy of Sciences:Technical Sciences,2007,55(1):91-98.
[4] REN W.On constrained nonlinear tracking control of a small fixed-wing UAV.J Intell Robot Syst,2007,48:525-537.
[5] 谈黎,贾培发.微小型直升机控制系统设计与姿态控制实验研究.制造业自动化,2006,28(7):23-27.
[6] 刘亚威,黄俊.微型固定翼飞行器的最新发展动态研究.航空兵器,2008(1):11-16.
[7] MOHR B B,FITZPATRICK D L.IEEE/ION Position,Location,and Navigation Symposium,Coronado,2006.
[8] KENDOUL F,NONAMI K.A visual navigation system for autonomous flight of micro air vehicles.The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems,St.Louis,USA,2009.
[9] 张福星,朱荣,刘旭东,等.基于MEMS 技术的微型飞行器测控系统研究.仪器仪表学报,2008,29(4):59-62.
[10] 陶冶,袁书明,陈华清,等.一种小型无人机飞行控制方法:中国,201110355161.9.2012-06-20.
猜你喜欢
智能制造(2021年4期)2021-11-04
热带作物学报(2021年1期)2021-02-22
民用飞机设计与研究(2020年1期)2020-05-21
青年歌声(2019年12期)2019-12-17
科技信息·中旬刊(2018年9期)2018-10-21
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2016年6期)2016-11-16
中国科技信息(2016年14期)2016-07-31
航空模型(2016年5期)2016-07-25
