
基于STM8L微处理器的便携式无线测振系统设计
2014-03-26 00:58黄明锋杨海马
仪表技术与传感器 2014年12期
黄明锋,应 捷,杨海马,2,杨 晖
(1.上海理工大学光电信息与计算机工程学院,上海 200093;2中国科学院上海技术物理研究所,上海 200083)
0 引言
精密与智能仪器对环境的振动要求比较苛刻,振动因素极有可能影响实验结果或者仪器内部器件使用寿命。然而近年来随着城市轨道交通网的兴建,地铁或城铁不可避免地会穿过各类精密仪器实验室区域,从而加剧了对实验室环境的污染,使高精密仪器出现信噪比低、数据不准、重复性变差、准确度下降、甚至不能正常工作等问题。所以对振动因素的测量与分析显得格外必要。
在确定以及测量仪器使用的环境时需要测量多个位置的振动信息,传统测振仪器通过布线的方式采集信息,带来了诸多不便,同时成本也难以控制。该设计中用轻便的nRF2401代替布线[1],组成分布式检测网络。同时选用超低功耗的STM8L系列单片机作为采集模块MCU。在成本低廉的情况下能在一个房间中布置多个设备,组成分布式测试网络。该设备传输稳定可靠,有效工作时间长,性价比高。
1 系统工作原理
系统主要由采集发送模块、接收存储模块及数据处理模块构成。系统框图如图1所示。数据采集模块中,三轴加速度传感器工作电流为20~30 mA;STM8L处理器在做数据处理时,工作电流仅约为0.6 mA;nRF2401无线收发模块以-6 dBm的功率发射时[2-3],其工作电流只有9 mA.模块整体工作电流在50 mA以下。模块由高能量密度的磷酸铁锂电池供电,电池容量3 000 mA,连续有效工作时间超过48 h.
超低功耗的STM8L处理器读取压电传感器采集的振动加速度,同时通过nRF24E1无线SOC单片机实现了振动信号的无线传输至接收存储模块。接收存储模块构建于STM32处理器[4],型号为STM32F103VET6,采用高性能的ARM Cortex-M3 32位的RISC内核,工作频率为72 MHz,内置高达512 K字节的闪存和64 K字节的SRAM,具有灵活的静态存储器控制器FSMC,并有多达13个通信接口,包括I2C,SPI,CAN,USB等接口。作为强大的调理处理器,接收存储模块处理来自多个振动检测模块传递的数据并向上位机通信,同时具有保存数据的功能,并且驱动的TFT液晶屏实时显示每个采集模块的振动波形及实时工作状态。
2 采集存储模块
2.1 压电式传感器
该设计中加速度传感器采用MMA7455 数字输出(IIC / SPI) 微电容调节式加速度感应芯片。MMA7455 是一款数字输出、低功耗、紧凑型电容式微机械加速度传感器,具有信号调理、低通滤波、温度补偿及自检测试功能,并可实现中断引脚(INT1 或 INT2)配置 、自由落体动力(0 g) 检测以及脉冲检测(用于快速运动检测)等功能[5~6]。

图1 系统原理图
MMA7455 感知移动的基本原理是内部电路中包含有公共端的两个电容,在整个电路中通过公共端的变化引起并联电容总电容值变化,如图 2 所示,当 MMA7455 向一个方向移动(此时向右) 时,由于惯性的原因,中间的公共端仍有维持原来位置状态的趋势,这样,两个电容的容值发生变化,再通过内部模数转换电路转换成相应的数字形式,通过 I2C总线和信号处理模块进行通信,满足所要求的功能。

图2 传感器工作原理
2.2 采集模块硬件设计
采集部分硬件接口如图3所示。MMA7455工作在I2C数据读取模式下,芯片13、14号脚分别为I2C串行数据输出和时钟信号输出,分别连接STM8L的PB5和PB6。无线收发模块与STM8L通过SPI接口通信。
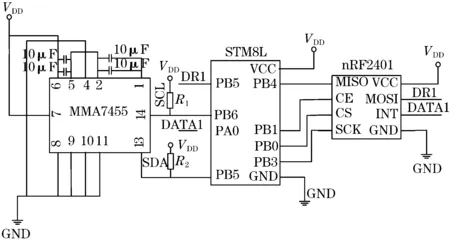
图3 采集发送模块硬件电路图
2.3 系统软件设计
系统软件包括测量模块采集信号及发送程序、调理模块接收信号及处理存储程序和串口数据发送程序,主要针对信号采集及发送程序和接收信号及处理存储程序进行了设计。主要程序流程图如图4和图5所示。

图4 采集发送程序框图

图5 调理模块程序
采集发送模块主要实现传感器的校准及发送采集数据。在多传感器分布式网络中,为了保证各节点发送接收时序正确,接受主机采用轮询方式从各采集节点依次接收数据。nRF2401数据包处理方式为增强型的 ShockBurst 模式,在这个模式下,只要有数据需要发送,nRF2401就会启动ShockBurst 模式自动发送数据,并且自动转到接收模式等待接收应答信号。如果没有应答信号,则会自动重发,直到达到最大重发次数,并产生中断,从而保证数据发送的稳定与正确,当发送端未接收到发送成功信号时,点亮警示信号灯。在接收端,当有条件连接上位机时,接收到的数据连同发送节点信号一齐通过串口发送至上位机实时处理,否则将数据保存于SD卡中,上位机可通过USB口直接访问调理模块的SD卡。
3 上位机处理实验数据
上位机主要实现数据分析功能。分辨采集模块数据,将接收的加速度信号两次积分,得到振动位移信号。同时对加速度信号进行FFT变换,得到振动频谱图[7]。
振动传感器采集的信号为振动幅度相对时间的一维函数,可以采用一维离散傅里叶变换将数据转换为频域信号:
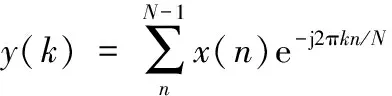
(1)
式中:n=0,1,2…,N-1;x为振动信号的一组抽样值;N为x中元素的数量。
软件实现N为1 024及进行1 024点的离散傅里叶变换。装置实测结果如图6~图9所示。
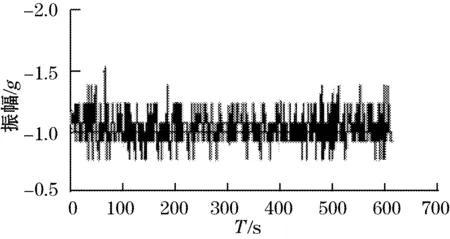
图6 传感器1原始信号

图7 传感器2原始信号

图8 传感器1频域波形

图9 传感器2频域波形
传感器1布置于实验室内,传感器2安放于靠窗位置。在窗外大型车辆经过时,实时显示波形发生肉眼能观察的变化。通过频域分析,检测频谱形态可得结论,环境干扰振动主要频率为60~100 Hz,符合物理学知识,此定量分析的结果可作为智能仪器安放地点选择与减振装置的设计的参考依据。
4 结束语
STM8L处理器和nRF2401无线模块具有功耗小、成本低、配置灵活等优点,广泛应用在无线数据通讯、工业传感器、安防系统等领域。文中设计的无线测振系统基于以上两者,布局灵活,能长时间稳定工作,且成本较低。适用于各种对仪器使用有振动要求的场合。
参考文献:
[1] 杨晖,刘欣,孙蓉霞.数字式 MEMS 加速度传感器在车载导航中的应用.仪器仪表学报,2005,26(8):26-30.
[2] 韩锋,马永昌,王友钊.基于ARM处理器的便携式振动测量分析仪的设计.仪表技术与传感器,2004(9):14-15.
[3] 黄豪彩,杨灿军,陈道华,等.基于 LabVIEW 的深海气密采水器测控系统.仪器仪表学报,2011,32:40-45.
[4] 李宁.基于MDK的STM32处理器开发应用.北京:北京航空航天大学出版社,2008:92-200.
[5] 赵明,徐科军,倪伟,等.一种无线传感器网络节点设计和通信协议研究.仪器仪表学报,2005,26(8):630-635.
[6] JAISHI B,REN W X.Structural finite element model updating using ambient vibration test results.Journal of Structural Engineering,2005,131(4):617-628.
[7] 廖珽,周萍,王继锋,等.基于NRF24L01的电池管理系统设计.计算机测量与控制,2013,21(5):1338-1340.
猜你喜欢
当代水产(2022年6期)2022-06-29
无线互联科技(2021年4期)2021-04-21
小猕猴智力画刊(2019年3期)2019-04-19
汽车观察(2018年12期)2018-12-26
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
汽车零部件(2014年1期)2014-09-21
微型计算机(2009年17期)2009-05-19
