
基于模糊PID控制的1/2车辆主动悬架系统研究
2014-03-25 10:07朱龙英赫建立
盐城工学院学报(自然科学版) 2014年1期
郑 帅,朱龙英,成 磊,赫建立
(1.安徽理工大学 机械工程学院,安徽 淮南 232001;2.盐城工学院 汽车工程学院,江苏 盐城 224051;3.常州大学 机械工程学院,江苏 常州 213164)
悬架系统是车辆的重要总成之一,它可以隔离地面传给车身的冲击与振动[1]。在增强汽车平顺舒适性的同时,车身加速度必须得到限制[2]。主动悬架能同时调节阻尼和刚度系数,在提高乘坐舒适性方面有较大的优势[3-4]。
主动悬架的研究主要集中在控制开发方面,柴陵江等人研究了主动悬架的LQG控制[5],虽然LQG控制鲁棒性好,但它需要大量的传感器对汽车行驶过程中的信号实时接收,导致成本增加和维护困难。文献[6,7]研究了主动悬架模糊控制,鲁棒性较好,但控制对象的连续变化将导致确定好的控制规则无法适应。而传统的PID控制器参数往往整定不良,性能欠佳,对运行工况适应性很差[8]。
针对以上问题,本文将PID控制理论和模糊控制策略结合,设计了基于1/2车辆主动悬架系统的模糊PID控制器,该控制器融合了两种控制策略的优点,鲁棒性更好。
1 车辆悬架模型及路面的建立
假设悬架系统由弹簧和阻尼组成,簧载与非簧载均是刚体,车轮简化为始终与地面接触的线性弹簧。图1为主动悬架半车模型。
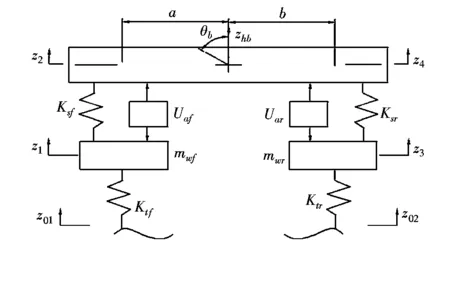
图1 主动悬架半车模型Fig.1 Half Vehicle Model of Active Suspension
其中mhb、mwf、mwr和Ihp分别表示1/2车身质量、前轮质量、后轮质量和俯仰转动惯量;Ksf、Ksr、Ktf和Ktr分别表示前悬架刚度、后悬架刚度、前轮刚度和后轮刚度;z1、z2、z3、z4、z01和z02分别表示前轮位移、前车身位移、后轮位移、后车身位移、前轮路面输入和后轮路面输入;Uaf和Uar分别表示前、后轮作动器控制力。
由牛顿第二定律得到其运动微分方程为:
(1)
用经一阶滤波的白噪声来模拟随机路面,车辆前后轮路面扰动相差时间t0=(a+b)/uc。随机路面的时域描述形式为:
(2)
(3)
t2=t1+t0
(4)
式中z01、z02为随机路面输入/m;f0为下截止频率/Hz;G0为路面不平度系数,m /cycle;uc为汽车行驶速度,m/s;w为均值为0、强度为1的高斯分布白噪声。

(5)
F=

2 模糊PID控制器的设计
把普通PID控制器和二维模糊控制器并联作为本文所设计的控制器,总控制量为两个控制器输出量之和。因被控量受到两个控制器补偿,系统的鲁棒性及抗干扰能力得到很大提高。
以前、后车身加速度作为PID控制的输入;两个模糊控制器的输入分别为前、后车身速度及其变化率,作动器控制力作为输出。采用高斯型隶属函数作为模糊输入变量,三角型隶属函数作为输出变量。分别以[-0.2,0.2]m/s和[-2,2]m/s2作为前、后车身垂向速度及加速度的基本论域,模糊输出作动力的基本论域为[-400,400]N,以[-6,6]作为相应的模糊论域。模糊控制规则制定的原则为:当误差大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制量要注意防止超调,以系统稳定性为主[9]。两模糊控制器的模糊控制规则如表1所示。
表1模糊控制规则
Table1TheFuzzyControlRules
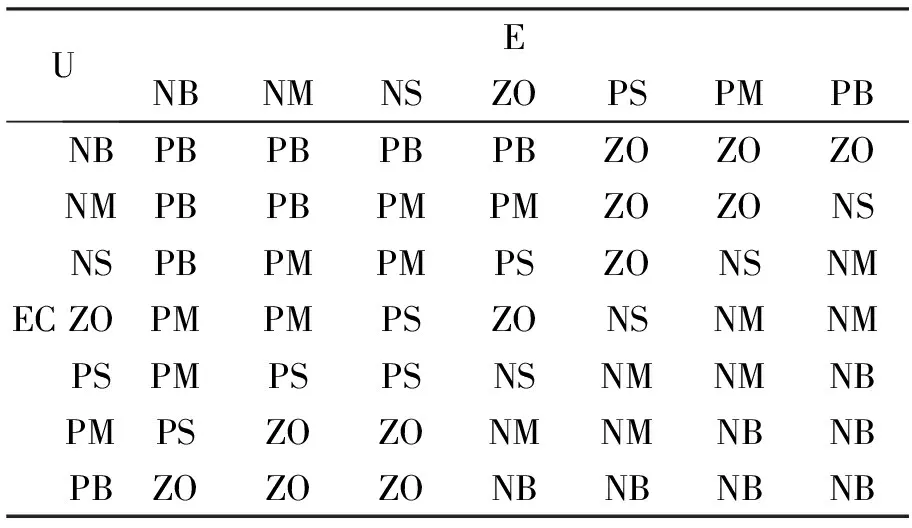
UE NB NM NS ZO PS PM PBECNBPBPBPBPBZOZOZONMPBPBPMPMZOZONSNSPBPMPMPSZONSNMZOPMPMPSZONSNMNMPSPMPSPSNSNMNMNBPMPSZOZONMNMNBNBPBZOZOZONBNBNBNB
工程中常采用面积重心法对输出变量解模糊化[10],重心法得到的精确控制量与比例因子相乘为单纯模糊控制的作动器控制力,即模糊输出量。则模糊PID控制器的作动器实际控制力即模糊控制与普通PID控制的输出量的叠加。
3 系统仿真
根据式(1)~(5),在MATLAB/Simulink中构建半车主动悬架系统仿真模型如图2所示。以某型车辆为研究对象,悬架参数如表2所示。
表2车辆模型结构参数数值
Table2ParameterNumericalofVehicleModelStructure
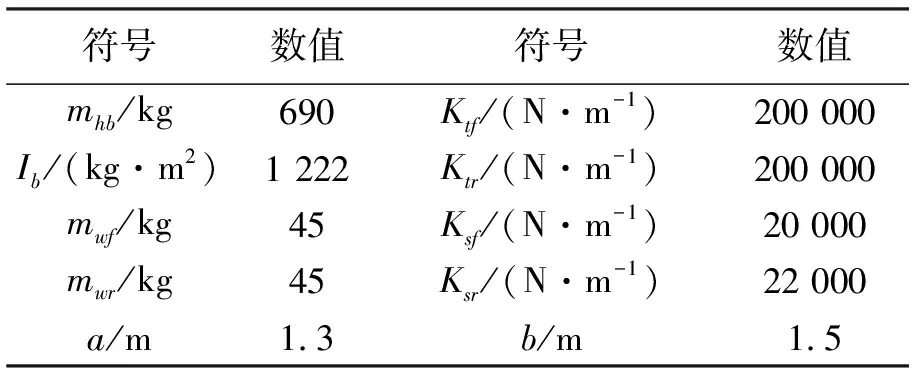
符号数值符号数值mhb/kg690Ktf/(N·m-1) 200 000Ib/(kg·m2) 1 222Ktr/(N·m-1)200 000mwf/kg45Ksf/(N·m-1)20 000mwr/kg 45Ksr/(N·m-1)22 000a/m1.3b/m1.5

图2 半车主动悬架模糊PID控制仿真模型Fig.2 Fuzzy PID Control Simulation Model of Half Vehicle Active Suspension
设置仿真时间80 s,选取20 m/s的支路路面作为仿真路面。设f0=0.1 Hz,G0=256×10-6m/cycle,uc=20 m/s。图3、图4、图5、图6分别表示模糊PID控制主动悬架、被动悬架以及LQG控制主动悬架在质心加速度、俯仰角加速度、前悬架动行程和前轮胎动位移方面的对比图。
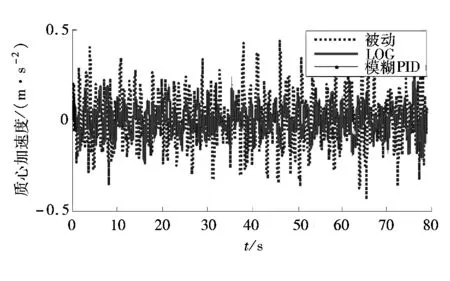
图3 质心加速度Fig.3 Centroid Acceleration
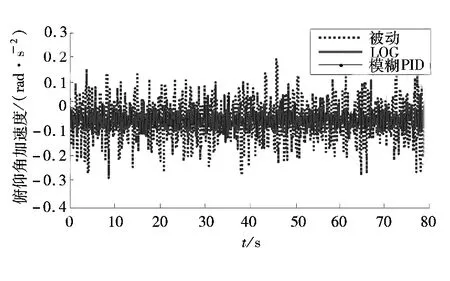
图4 俯仰角加速度Fig.4 Pitch Angular Acceleration
在相同的仿真条件下对被动悬架模型、PID控制、模糊控制主动悬架模型进行了仿真,并对车辆质心加速度、俯仰角加速、悬架动行程和轮胎动位移的标准差值进行比较,如表3所示。
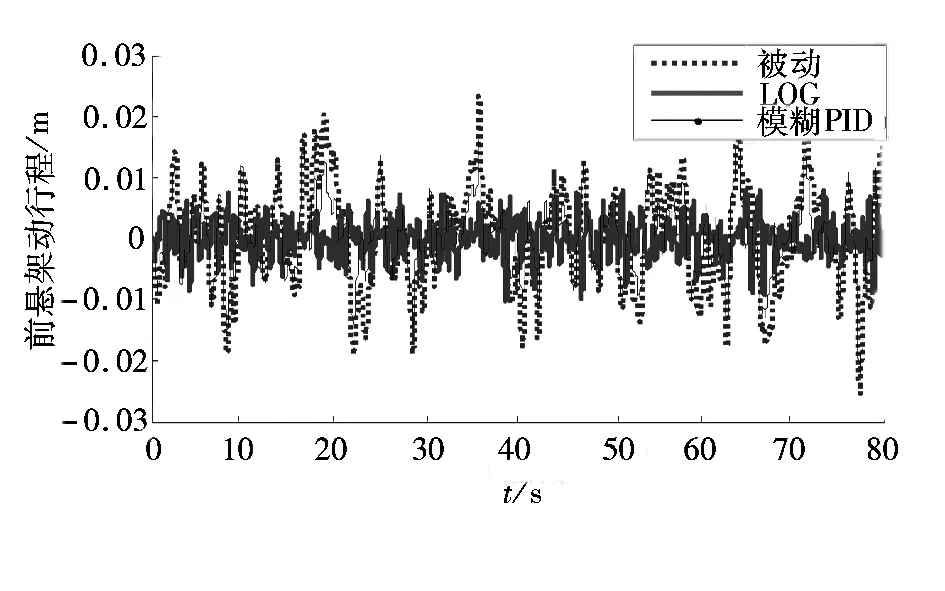
图5 前悬架动行程Fig.5 Front Suspension Dynamic Travel
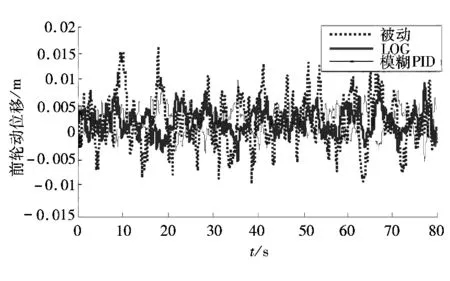
图6 前轮动位移Fig.6 Front Tire Dynamic Displacement
从表3可以看出在车身质心加速度和俯仰角加速度指标上,与被动悬架相比,模糊PID控制车身质心加速度标准差减小了45.0%,与最优控制主动悬架相似;俯仰角加速度标准差减小了61.2%,仅次于最优控制。在悬架动行程以及车轮动位移方面较被动悬架都有较大的改善。模糊PID控制主动悬架性能在总体上优于单纯的模糊控制和PID控制。
表3不同控制策略悬架性能标准差值
Table3SuspensionPerformanceStandardDeviationofDifferentControlStrategies
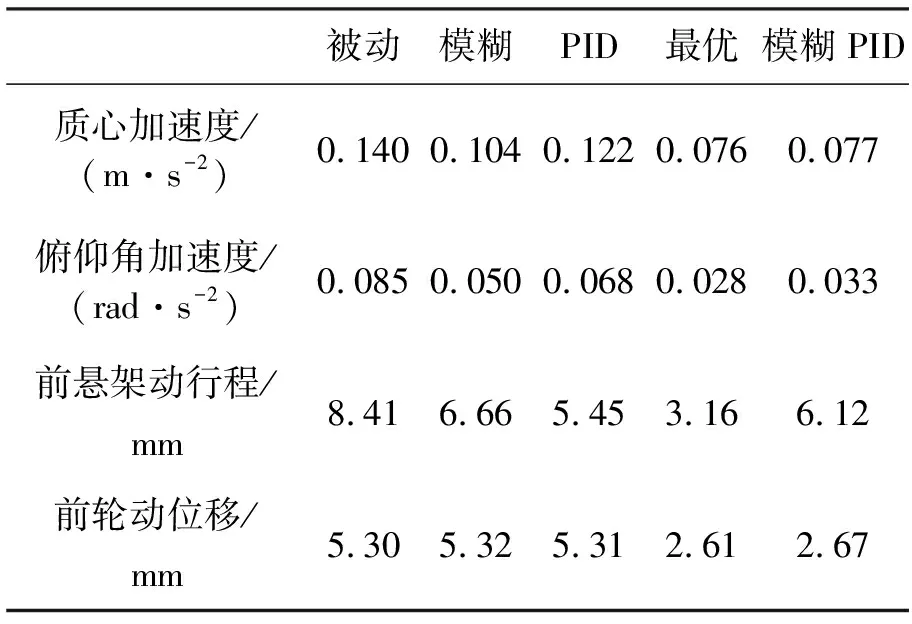
被动 模糊 PID 最优 模糊PID质心加速度/(m·s-2) 0.140 0.104 0.122 0.076 0.077俯仰角加速度/(rad·s-2) 0.085 0.050 0.068 0.028 0.033前悬架动行程/mm 8.41 6.66 5.45 3.16 6.12前轮动位移/mm 5.30 5.32 5.31 2.61 2.67
4 结论
通过仿真计算分析,单纯的模糊控制和PID控制都可以在一定程度上改善悬架的性能,提高汽车的行驶平顺性和乘坐舒适性。但将两种控制策略并联应用后,悬架性能将得到更大的提高。在人们所关心的质心加速度、俯仰角加速度、悬架动行程以及轮胎动位移等方面的控制效果与LQG控制相似。因此文中设计的模糊PID控制策略可以使主动悬架控制问题得到较好地解决。
参考文献:
[1] 严天一,闫海敬,侯兆萌,等.车辆半主动悬架粒子群模糊混合控制策略[J].农业机械学报,2013,44(8):1-7.
[2] 刘晓培.基于遗传算法的汽车主动悬架LQR控制器的优化设计[J].组合机床与自动化加工技术,2013,6(6):78-80.
[3] 张国光,张勇超,喻凡.车辆电动悬架的混合不确定建模与μ综合控制器设计[J].汽车工程,2012,34(12):1 100-1 106.
[4] 赵海英,邝钰,吴忠强.汽车主动悬架的自适应Backsetpping控制[J].制造业自动化,2013,35(8):113-117.
[5] 柴陵江,孙涛,冯金芝,等.基于层次分析法的主动悬架LQG控制器设计[J].汽车工程,2010,32(8):712-718.
[6] 张正.汽车主动悬架控制策略及仿真研究[D].青岛:青岛理工大学,2012.
[7] 张慧鹏. 基于模糊理论的车辆主动悬架控制策略与仿真研究[D].西安:西北农林科技大学,2007.
[8] 刘金琨,先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[9] 马长华,于世海,朱伟兴.基于遗传算法的模糊控制规则优化的研究[J].江苏大学学报:自然科学版,2003,24(4):69-73.
[10] 张谦. 1/ 2汽车半主动悬架模糊PID控制器设计与仿真[J].公路与汽运,2008(3):25-27.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
小学生学习指导·爆笑校园(2019年6期)2019-09-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
红蜻蜓·低年级(2015年11期)2016-02-02
西北工业大学学报(2015年1期)2016-01-19
应用科技(2015年5期)2015-12-09
中国自行车·骑行风尚(2014年4期)2014-10-10
